遠控岸邊集裝箱起重機定位技術
2020-09-03 07:37:48劉東輝余珍勝李書強
港口裝卸 2020年4期
劉東輝 余珍勝 李書強
青島海西重機有限責任公司
1 引言
岸邊集裝箱起重機(以下簡稱岸橋)是以裝卸集裝箱為目的的大型設備,集裝箱在船艙或者集卡上,其位置值是一個相對于地面的坐標位置。要實現起重機抓取集裝箱,就需要起重機跟集裝箱的坐標位置在同一個坐標系下。起重機的三大機構(起升、小車、大車)分別對應集裝箱的三維坐標。以地面為基準,建立一個坐標系,X軸為大車方向,Y軸為小車方向,Z軸對應起升方向。在岸橋半自動化運行過程中,起重機基礎模塊控制各主機構的運行方向和速度,反饋各主機構實際速度和位置給半自動化模塊,主機構位置閉環控制在半自動化模塊中完成。本文介紹了遠控岸橋定位系統的構成和功能,分析了工作機構定位系統與負載定位系統關鍵技術,可為碼頭新增自動化岸橋設備或者常規岸橋的自動化改造提供參考。
2 遠控岸橋定位系統構成與功能
2.1 遠控岸橋定位系統總體構成
遠控岸橋的定位系統檢測起重機各機構的絕對位置,并與安全碰撞子系統進行連鎖檢測保護,提高系統精度和安全性。系統主要包括:大車定位系統、小車定位系統、起升定位系統,負載定位系統。定位過程綜合應用了無線射頻、紅外線定位等技術,為設備的自動化、智能化運行提供數據基礎。
2.2 大車定位系統
大車定位系統的控制精度為20 mm,可以滿足遠控岸橋的自動化需求。推薦使用RFM100直線位置測量系統測量大車機構的絕對位置。
RFM100系統是基于無線射頻技術(RFID)的單軸絕對位置測量系統,系統由天線、增量編碼器、接線箱和磁釘組成[1]。天線安裝在岸橋大車上,靠近地面,但高于地面;磁釘安裝在沿著大車軌道的地面下,與天線對應,數量取決于大車軌道長度,以規定的間距安裝。RFM100系統組成見圖1。
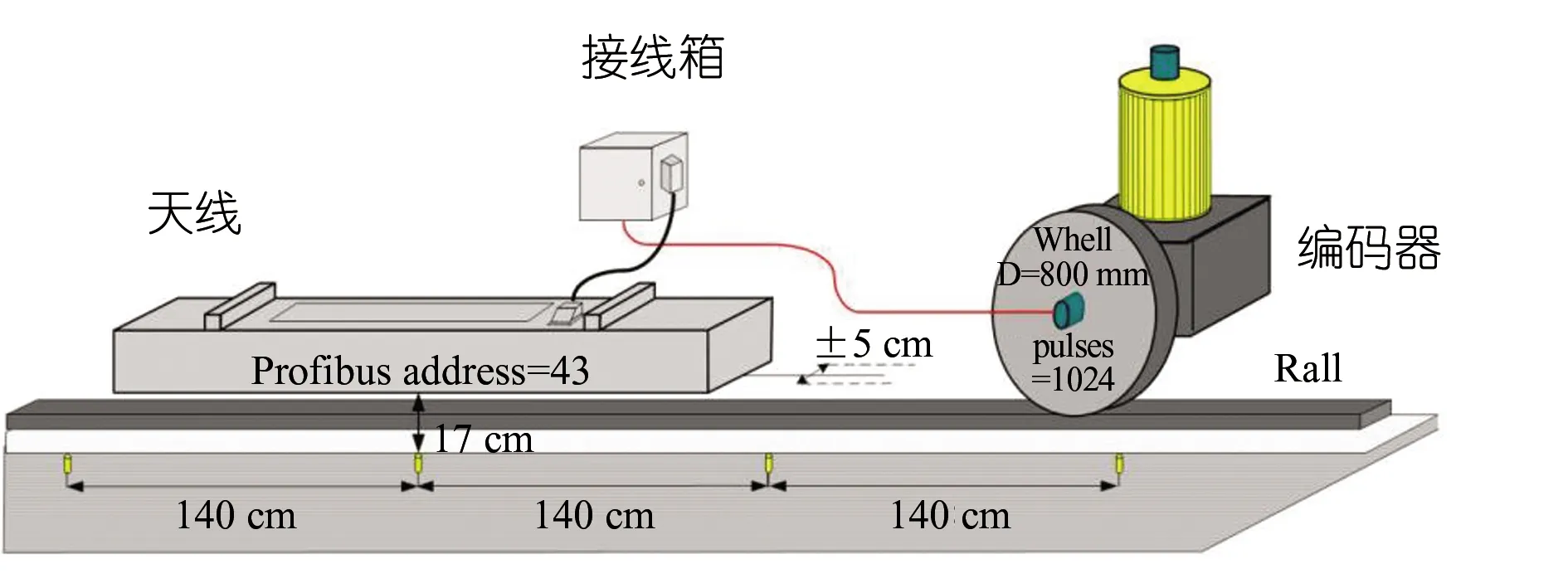
圖1 RFM100系統組成
RFID射頻工作原理如下。磁釘為全玻璃密封的無源器件,內含儲存單元,可自由編寫位置代碼,可重復編碼。天線運行頻率為134 kHz,能發出電磁波對其范圍內的磁釘充能,激活的磁釘能發出包含儲存信息的電磁波,天線接收到磁釘返回的電磁波后,能讀出磁釘儲存單元的信息和計算出該磁釘在天線范圍內的具體位置,發送給主控系統,使主控能進行定位控制。
起重機大車行走過程中,當探頭經過感應器時,給予感應器134 kHz的磁場能量,感應器則以一般頻率回饋它的編碼。探頭中的解碼器對這個編碼進行解碼,并將其傳輸給起重機控制系統。由于感應器安裝在碼頭地面下,其絕對位置不變,且編碼唯一,因此探頭所得到的編碼信息就可以轉換為大車在碼頭的位置[2]。
當選擇最小的磁釘安裝距離±1 400 mm后,RFM100定位系統可以消除輪子滑動對測量精度的影響。在這種情況下,任何時刻始終有1個磁釘位于天線的下面用于絕對位置的測量,因此可以完全校正輪軌滑動帶來的誤差。
此系統配置連接到天線的增量型編碼器,是用于計算更新2次磁釘閱讀之間的距離。增量編碼器可安裝在車輪的傳動軸上,也可安裝在驅動輪的電機端上,這種情況下需考慮齒輪變比。編碼器需采用HTL型的增量編碼器,電源電壓為直流24 V。脈沖增量型編碼器必須一直連接到RFM100系統中,用于更新計算在射頻測量間隔時間內位置的變化。位置數據更新率為1 ms(配置編碼器),磁釘絕對位置更新率為50 ms。
RFM100測量系統可以選配不同的通訊接口用于連接起重機的電控系統,同時配置1個調試端口用于系統的設置和診斷。RFM100系統適用的最大速度為12 m/s,滿足岸橋大車的允許最大速度要求。RFM100磁釘定位技術方案精度達到2 mm,磁釘埋入地下,不會阻斷碼頭上的行車,基本不受沉降的影響、免維護。
2.3 小車定位系統
小車定位系統的控制精度為20 mm,可以滿足遠控岸橋自動化需求,定位方案為小車絕對位置檢測(線性磁尺)定位系統和增量式編碼器(小車電機自帶編碼器)兩套獨立的位置檢測系統。兩套位置檢測系統互相校驗,當兩個位置檢測系統中的一個發生故障時,僅一個位置檢測系統也可以保證定位功能。小車定位系統建議采用POMUX KH53直線式絕對編碼器。
POMUX KH53直線式絕對編碼器由兩部分組成:閱讀器(探頭)和感應標尺(磁尺)。閱讀器安裝在小車上和小車一起移動,感應標尺則沿著軌道方向安裝,保持一定的直線度,且和小車上的閱讀器保持一定的間距。
閱讀器內置有用來檢測磁性元件的霍爾傳感陣列,每段感應標尺內置了不同數量和距離分布的永磁鐵。這些在感應標尺內按照一定方式排列的永磁鐵代表此段感應標尺的位置編碼,順序排列的3個永磁鐵為唯一的位置組別。測量時,通過閱讀器里的霍爾傳感器陣列檢測該磁場編碼,確定絕對位置(見圖2)。這些信息通過接口通訊傳輸給起重機控制系統。

圖2 POMUX KH53直線式絕對編碼器工作原理
POMUX KH53增強型系統測量距離可以從幾m到548 m,完全滿足起重機的使用范圍要求。系統要避免各類磁場的影響,如磁鐵限位、動力電纜產生的磁場,電機、磁性鋼等。整個行程中,任何POMUX KH53元件和其他磁性材料,都必須保證最小80 mm的間距。感應標尺安裝支架和螺絲都必須用非磁性材料制作。
POMUX KH53無論在哪種工作條件下,探頭必須能感應到感應標尺,即探頭必須一直在相對磁尺的垂直或水平間距容許誤差內,KH53增強型最大容許的水平誤差和垂直誤差都是±20 mm。
2.4 起升定位系統
起升定位系統的控制精度為10 mm,可以滿足遠控岸橋的自動化控制需求。系統采用抗干擾性和數據可靠性好的U-ONE絕對值編碼器。U-ONE為一種電子位置凸輪,將速度、位置和超速檢測結合在1個單元里。該系統包括1個通用的基本單元及通過EMC防護光纖電纜連接到控制柜內的電子功能模塊。編碼器安裝在卷筒側,與船型掃描(SPSS)激光測距反射板做雙重校驗。
2.5 負載定位系統
遠控岸橋陸側自動著箱的控制關鍵為負載定位系統。負載定位系統用于檢測吊具在大車和小車方向上的偏差位置和實際的扭轉角度,即測量吊具在X方向和Y方向上的實際偏差和扭轉,用于實現對吊具位置控制的閉環反饋,最終實現吊具和目標位置(例如集裝箱和集卡)的精確對準和閉環防搖。
負載定位采用IRM(InfraRed Measurement system for spreaders)紅外線吊具測量系統,與傳統的透鏡和CMOS傳感器組成的照相測量系統不同,IRM采用透鏡把紅外線光源投影聚焦到PSD(位置感應器)上,PSD能夠對光斑進行高精度的定位。
IRM系統由1個紅外線發射器和1個接收器組成,紅外線發射器安裝在起重機吊具上架上,接收器垂直安裝在對應的小車架下。在小車架上的接收器內部的PSD光電板接收到從安裝在吊具上架上的發射器發送過來的紅外線光脈沖,轉變成不同數值的電壓、電流信號,從而計算出高度、搖擺、扭轉等測量值。發射器TX內置二維傾轉傳感器,可通過吊具電纜或者無線傳送測量值,完成TRIM/LIST數據傳輸;接收器RX內置二維傾轉傳感器測量小車前后和左右傾的角度,小車傾斜測量。
每個發射器有2對LED發光點組成,每一對LED發光點會安裝固定的頻率向接收器發射紅外線光線,并且按照時間編碼輪流發射。在有效的工作距離內,接收器鋪捉和檢測每一對LED發光點發車的光斑,同時計算接收器和發射器之間的距離、搖擺的角度和回轉的角度。
岸橋采用IRM400系統,可測搖擺角度為±4.5°,大車和小車方向搖擺角度精度為±0.02°,回轉角度0~360°,回轉角度精度±0.2°,TRIM/LIST角度±5°,TRIM/LIST精度±0.05°。以上測量精度滿足遠控岸橋的陸側自動著箱。自動化PLC將會根據系統提供的檢測結果計算出一個補償位置值,并實時監測吊具相對于小車和周圍集裝箱之間的距離以及吊具實際旋轉角度。
3 結語
集裝箱起重機的精確定位對于實現自動化至關重要,隨著物聯網技術的發展和檢測技術的進步,以及對自動化精度要求的提高,更先進的定位系統將不斷出現,并應用到集裝箱起重機領域。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
