基于脈沖數據流的雷達輻射源個體識別方法及實現
2020-08-26 05:17:14劉瑞豐王海劍
艦船電子對抗 2020年3期
關鍵詞:特征
嚴 勇,劉瑞豐,王海劍
(解放軍91650部隊,廣東 廣州 510320)
0 引 言
現代雷達為達到抗干擾、低截獲等效果往往采用復雜體制。復雜體制的一個重要表現就是雷達各種參數的變化多,變化快。例如采用捷變模式的復雜雷達,頻率的捷變使雷達載頻范圍和帶寬擴大,可抗瞄準式干擾和提高雷達目標檢測能力。復雜體制雷達導致脈沖序列變化多,數據量大,簡單的參數比對和記錄不能完全表征雷達參數的特征。文獻[1]提出基于多脈沖的雷達個體識別技術,主要是基于頻率穩定度,以及脈沖重復間隔穩定度進行個體識別,但都是基于單個脈沖參數,無法體現多個脈沖參數的特點。文獻[2]采用統計的方法,總結脈沖間的規律,來體現雷達個體的差異,但是不能對脈沖序列進行描述。基于脈沖數據流的方法可根據脈沖數據流的特征描述雷達個體差異,實現對雷達輻射源的個體識別。
1 基于脈沖數據流的個體識別方法原理
1.1 脈沖數據流的定義
脈沖數據流是指雷達根據其變化的全脈沖參數值,構成的一系列不同參數值的數據集合。根據脈沖雷達常規參數的數量,可得到雷達參數種類集合:Zm={A1,A2,A3,…,Am},m為雷達脈沖參數個數。雷達其中一個脈沖參數值的集合可表示為ALn={AL1,AL2,AL3,…,ALn},為雷達脈沖參數AL的值脈沖儲備序列,其中n為參數AL的脈沖序列個數。雷達脈沖參數一般包含載頻、重復間隔、脈寬、幅度等參數。載頻集合A1i={A11,A12,A13,…,A1i},為雷達脈沖參數A1載頻值的儲備序列,其中i為載頻值的序列個數。重復間隔集合A2j={A21,A2,A23,…,A2j},為雷達脈沖參數A2重復間隔值的儲備序列,其中j為重復間隔值的序列個數。脈寬集合A3k={A31,A32,A33,…,A3k},為雷達脈沖參數A3脈寬值的儲備序列,其中k為脈寬值的序列個數。假設發射脈沖序列選取L個脈沖參數種類,則發射脈沖數據流可表示為集合BM={B1,B2,B3,…,BL},其中B1∈A1i,B2∈A2j,…,BL∈ALn。發射的脈沖數據流BM的序列總數量最大值M為所有脈沖參數個數的乘積,即M=i×j×k×…×n。
1.2 脈沖數據流的特性
脈沖數據流由多個脈沖特征參數綜合決定,具有數量的有限性、序列的差異性以及個體特征性。
脈沖數據流的有限性由每一個脈沖參數的數量有限性決定。對于捷變頻雷達,其載頻值的變化數量由雷達捷變值的大小決定。脈沖參數值的變化范圍由設備自身設計時決定,在一定范圍內變化。
脈沖數據流的差異性體現在同型雷達脈沖序列的組合不同、不同型雷達脈沖參數值的不同2個方面。同型號雷達,脈沖參數的值可能相同,但脈沖序列組合方式不同,序列構成就不同。不同型雷達一般在參數上有較大差異,能直接區分。
脈沖數據流的個體特征性是指同型雷達不同個體,使用的脈沖序列不同,即脈沖在相同參數變化范圍內,使用的脈沖序列組合不同,體現出個體的差異。
1.3 脈沖數據流具備個體識別的條件
一是雷達脈沖參數具有可變性且參數值準確度高。頻率捷變雷達具有類似特征,頻率值變化范圍從幾十兆到上百兆,頻率可選擇點數多。對于采用脈內調制的脈沖,當調制帶寬較大時,頻率值一般取中心值,由于接收設備存在各種誤差可導致中心頻率測不準[3],不建議該類型參數進行脈沖數據流個體識別。一般要求脈內調制帶寬小,得到的頻率精度和準確度較高,脈沖參數比對的意義才較大。
二是不同脈沖參數需要組合,構成多種脈沖序列。雷達參數一般是指載頻、重復間隔、脈寬等,可組合的參數序列組合樣式由載頻值數量、重復間隔值數量和脈寬值數量決定。多種參數組合變化可以構成脈沖序列的多樣性,確保脈沖序列重復率低,可選擇性多。
三是不同個體有差異。不同雷達個體的載頻、重復間隔等參數的取值范圍不同,具體取值方式不同,得到的脈沖序列流組合就不同,形成的個體特征庫就不同,才能夠通過特征庫的匹配得到近似的雷達個體。
1.4 基于脈沖數據流的匹配識別方法
匹配識別方法是通過積累雷達個體脈沖序列組合,構建個體識別特征庫,對實驗個體脈沖數據流數據與個體識別特征庫進行脈沖流匹配,得到整個脈沖數據流的匹配度,從而得到最近似的雷達個體匹配結果。
2 基于脈沖數據流的個體識別流程
2.1 確定特征脈沖參數
不同型號雷達特征脈沖參數的選擇不同,如頻率捷變雷達,重復間隔也采用捷變,而脈寬為固定,則可選擇頻率和重復間隔作為特征脈沖參數。一般要求2個及以上特征參數,組合構成脈沖序列流類型和數量較多,實際使用的選擇性較大。如下列雷達載頻值捷變有8個范圍段,可取值較多,重復間隔取值有5段,取值多,頻率與重復間隔可組合性強,脈沖參數序列多樣。
2.2 建立雷達個體脈沖序列特征庫
建立脈沖序列特征庫需要大量數據樣本,對樣本數據進行分析統計,得到所有脈沖序列組合。不同雷達選擇的脈沖特征參數不一樣,得到的參數特征庫內容不同。
2.3 建立雷達個體脈沖序列圖譜
雷達脈沖序列圖譜就是脈沖序列的多維展示,以采用頻率和重復間隔2個脈沖參數的二維脈沖序列為例,構建的脈沖數據圖譜為頻率和重復間隔二維圖。不同型號雷達特征圖譜參數使用不同,不具有可比性;同型號雷達不同雷達個體脈沖數據圖譜使用相同特征參數,但具體脈沖流數據不同,具有差異性,是能進行個體識別的典型特征。
2.4 脈沖數據流快速個體識別
把樣本數據逐一與雷達特征序列庫數據進行查找匹配,得到每組脈沖數據是否存在匹配,最后匯總所有脈沖數據,得到脈沖數據流與庫的匹配率,根據匹配結果選擇匹配率最高的雷達個體作為個體識別結果。根據不同個體特征庫的差異,可設置不同的匹配率作為最后是否匹配個體的結果。快速識別方法,能在實時獲取采集樣本的情況下,對樣本數據與多個特征庫數據進行比對,得到多個匹配結果,選擇匹配度最高的作為匹配結果。圖1為基于脈沖數據流的匹配識別方法原理圖。圖2、圖3為某型雷達頻率統計圖和重復間隔統計圖。
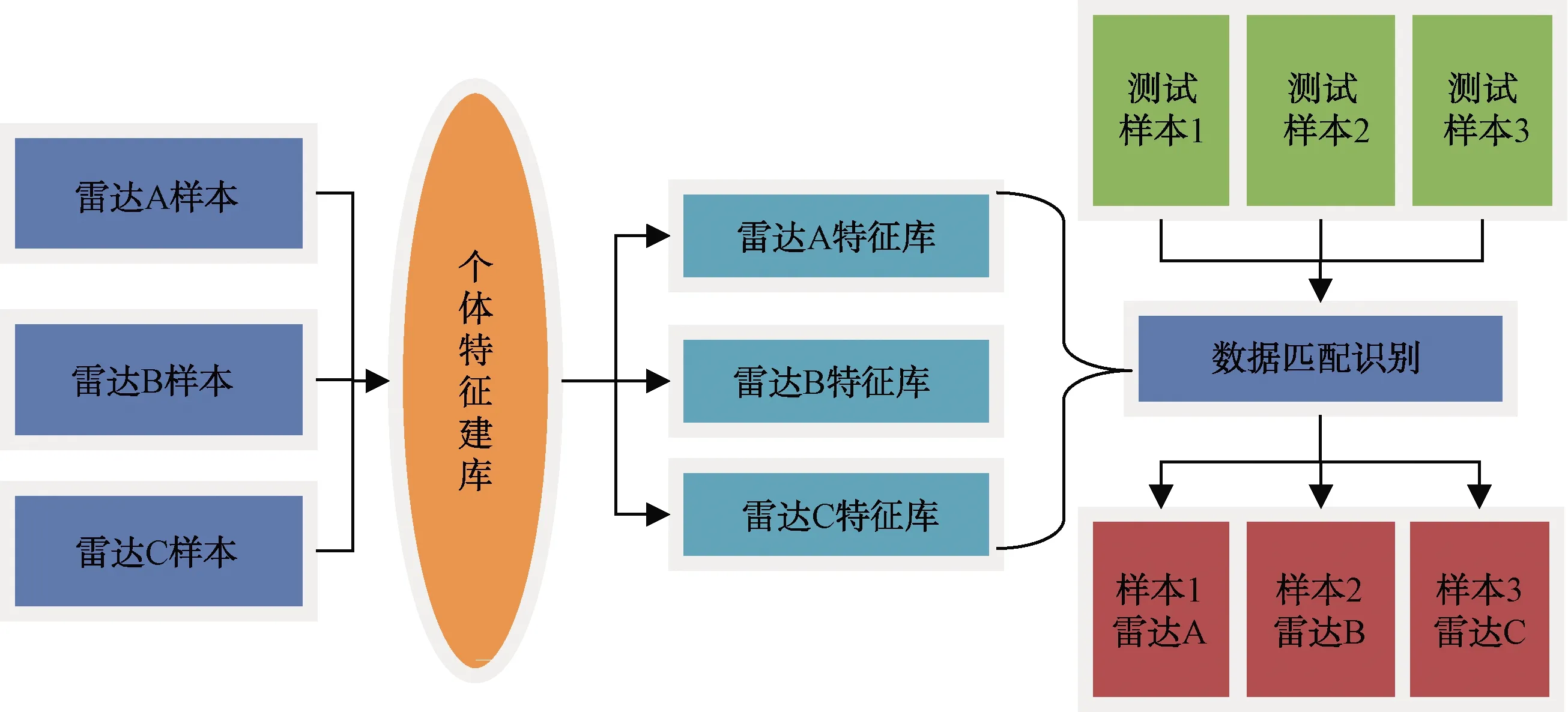
圖1 基于脈沖數據流的匹配識別方法原理圖
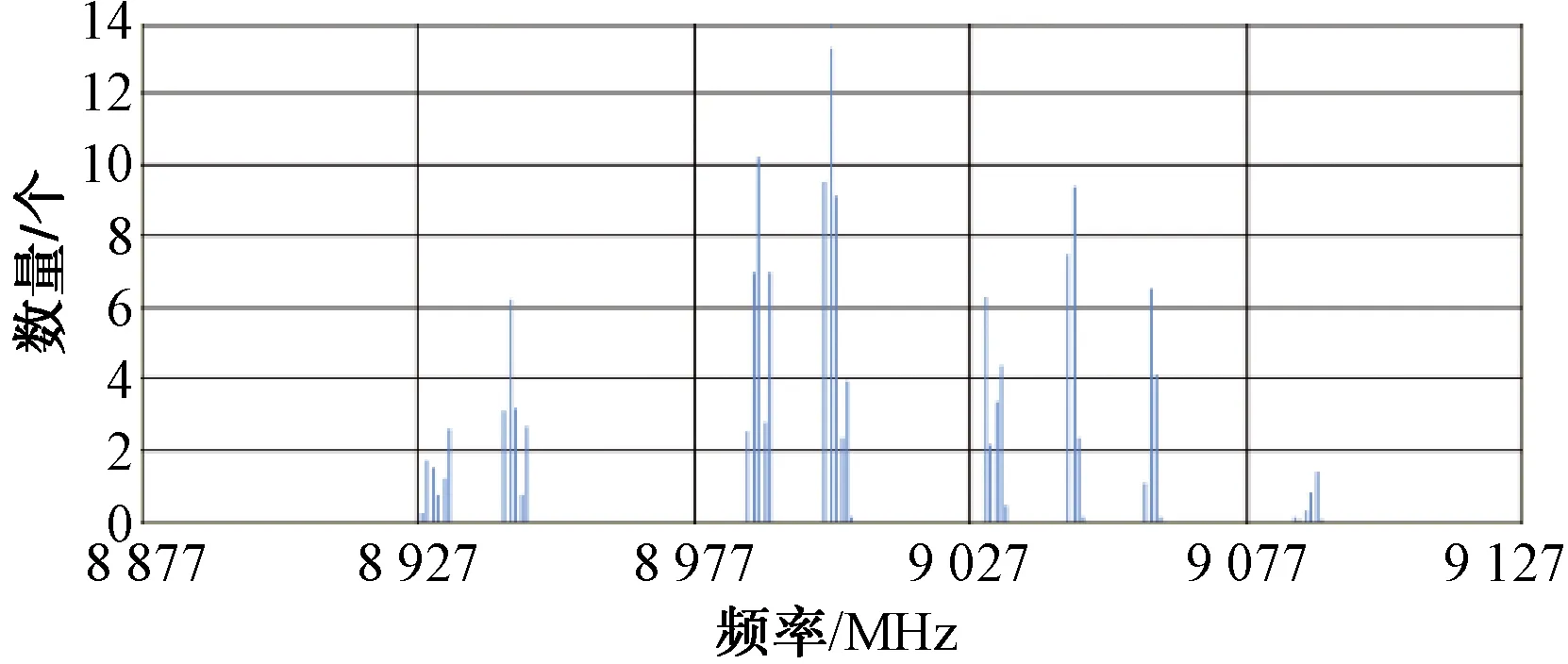
圖2 某型雷達頻率統計圖
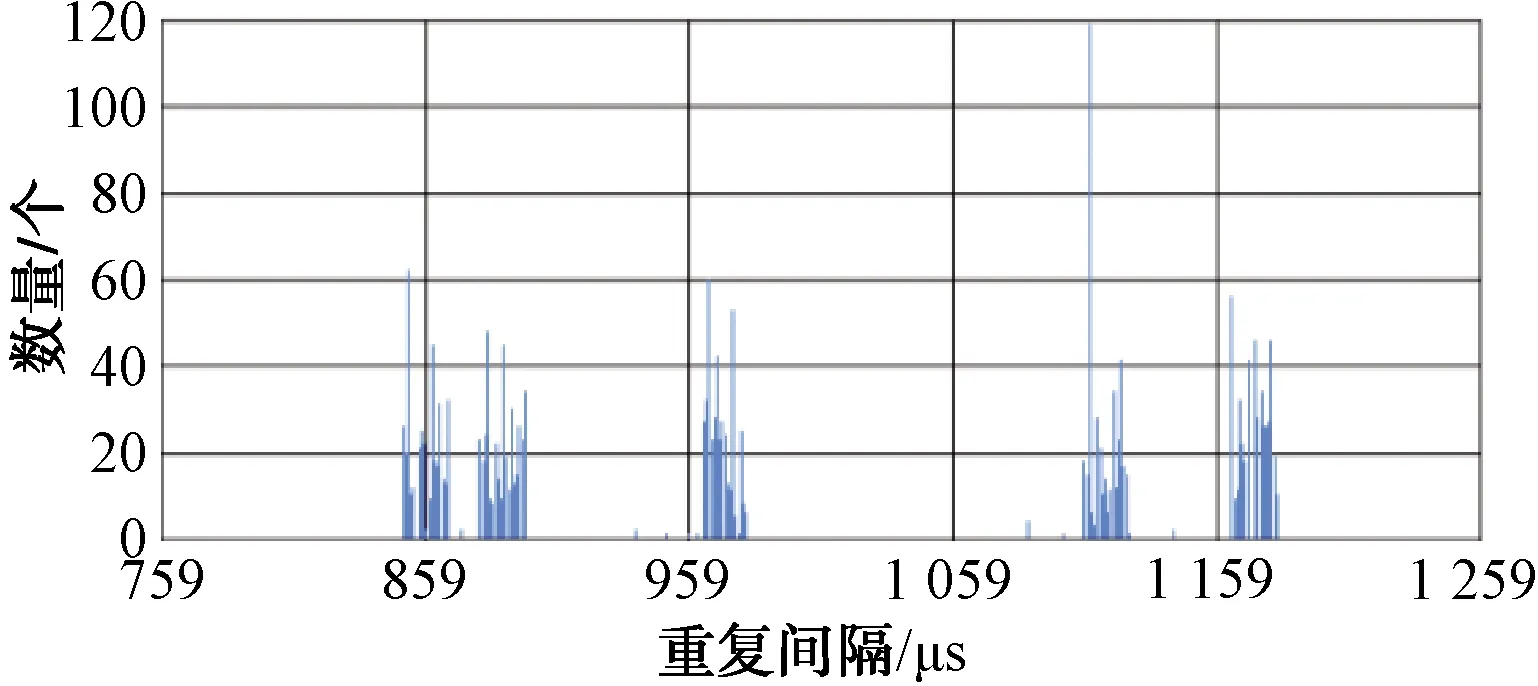
圖3 某型雷達重復間隔統計圖
3 基于脈沖數據流的個體識別實現
3.1 數據預處理
脈沖數據流方法對脈沖數據的準確度要求高。由于不同裝備采集數據的規范和方法不一樣,導致設備參數出現部分差異,需要將入庫數據與測試數據進行預處理。
一是要確定數據的真實性。入庫數據一般是確定的雷達個體目標數據,判情要準確無誤。參數的采集方法要適當,得到的參數數據要準確穩定。測試數據一般為未知個體,數據不能進行人為修改,確保匹配結果的準確性。
二是剔除錯誤數據。在設備采集數據過程中,會因為設備采集條件以及雷達個體位置距離等外界條件影響設備采集數據的準確性。需要對明顯錯誤的數據以及信噪比差導致脈沖測不準等引起的參數測量錯誤數據進行清除操作。
三是調整參數精度。雷達脈沖參數中頻率測量的精度一般由設備自身接收機決定,在正常信噪比情況下的精度一般比較高,雷達脈沖重復間隔參數一般由設備通過到達時間差計算得到,主要由設備時鐘與脈沖到達時接收機狀態決定。偵察設備在實際工作中可能由于信噪比、相對位移、相對速度等因素導致設備測得的參數不準,需要結合參數實際確定參數精度。
3.2 程序實現
程序通過VS2013軟件環境,實現對雷達參數原始數據的入庫統計,建立雷達個體特征庫。通過MATAB畫圖程序實現對特征數據庫的畫圖,直觀查看特征數據庫的分布情況。
通過對樣本數據逐一匹配,統計得到所有樣本數據的總體匹配率,實現對樣本數據的多個匹配結果輸出。通過3部同型號雷達參數數據建庫,得到表1所示不同數據匹配比對結果。
4 該輻射源個體識別方法特點及存在問題
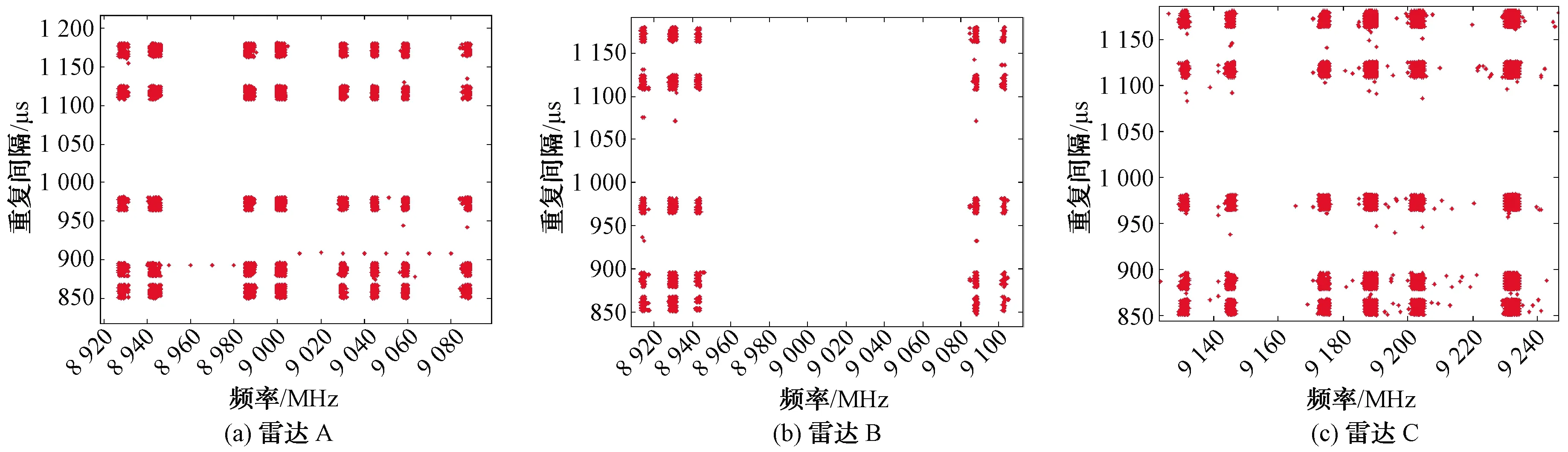
圖4 雷達特征庫數據分布
采用脈沖數據流的個體識別方法,能夠快速直觀地得到樣本數據和已知雷達個體的匹配度,以及樣本數據的個體識別結果,具有方法簡單、特征效果直觀、識別準確度高的特點。但是其也存在一些問題:一是建庫需要大量樣本數據。由于脈沖數據多,需要針對每個個體收集大量個體雷達脈沖數據,統計得到完整的個體特征數據庫。個體特征數據庫越全,個體識別成功率越高。二是該方法限制條件多,適用面受限。該方法對脈沖參數的限制條件要求多,參數要求具有捷變等特性,部分雷達不適用。

表1 3部同型號雷達參數數據匹配比對結果
5 結束語
現今對雷達個體的識別方法雖然有很多,但是每種方法都具有不同的適用性。本文針對脈沖數據流的方法以及其他關于脈沖內部指紋信息[4]等方法達到的效果都比較有限。新體制雷達的不斷發展進步,雷達脈沖序列組合以及脈沖內部調制等方式日趨復雜,但脈沖內部指紋信息差異性逐漸縮小,趨于固化,需要結合雷達具體型號、樣式、工作模式進行不同的方法區分,也導致雷達輻射源個體識別方法的受限性越來越大。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
