BDS 復雜場景自適應導航數據融合算法
2020-08-25 13:29:52范亞軍
導航定位學報 2020年4期
范亞軍,王 萍
(東華大學 信息科學與技術學院,上海 201600)
0 引言
隨著我國北斗衛星導航系統(BeiDou navigation satellite system, BDS)的建設加快,目前對實際導航應用的需求越來越大[1]。但是BDS 高精度技術[2-4]發展迅速,單一傳感器針對大型復雜城市定位精度的實時性并不能完全滿足實時高精度定位的需求。在 BDS 高精度場景聚類模型中,基于美國電氣設備制造商行業協會(The National Electrical Manufacturers Association, NEMA)協議提取5 類參數,再基于所提參數將路測環境自動聚類成12 類場景。在這些場景下,不同定位傳感器的定位效果是不一致的。為了達到實時、高精度[5],需要模型將多傳感器的數據進行融合[6],結合各傳感器在不同場景的定位優勢,融合成精度較高的實時定位數據。
為了倡導多源融合導航的研究,各類傳感器的定位優勢也在不斷挖掘,常用的主流傳感器有:全球衛星導航系統(global navigation satellite system,GNSS)傳感器,用于接收并解析衛星發送的定位報文信息;實時動態差分(real-time kinematic, RTK)傳感器,實時解析差分信息并修正地理位置數據[7];慣性導航系統(inertial navigation system, INS)傳感器,用于自身姿態解算,來實現短時間衛星失鎖的定位[8];即時定位與地圖構建(simultaneous localization and mapping, SLAM)傳感器,通過前端視頻實時重構環境,以實現自身定位[9]等。
多源融合技術促進了BDS 高精度導航的發展,通過多傳感器融合,發揮各傳感器的場景優勢,解決在不同場景下部分傳感器失效的問題,實現連續的高精度導航。目前常用的多源數據融合技術有通過前饋(back propagation,BP)神經網絡或深度信念網絡的方法來實現多源數據融合[10]。本文采用的多源數據融合方法是基于層次分析法(analytic hierarchy process,AHP),層次分析法常用于行為分析、質量評價等[11]。本文利用層次分析法計算多源傳感器基于場景時的實時權重,并以此來進行多源數據融合。另外,通過多源數據融合,還可以解決部分路段上單一傳感器定位時產生的飛點和孤點等異常點定位問題[12],使定位數據可以達到適應復雜場景下高精度定位的目的。
1 多源融合理論依據
1.1 傳統加權融合
在多源融合系統中,對協議提取的n類指標進行權重矩陣的設計并檢驗其一致性,然后進行多傳感器的權重向量計算,以得到基于指標的權重向量集并基于權重向量計算加權融合結果,如圖1 所示。
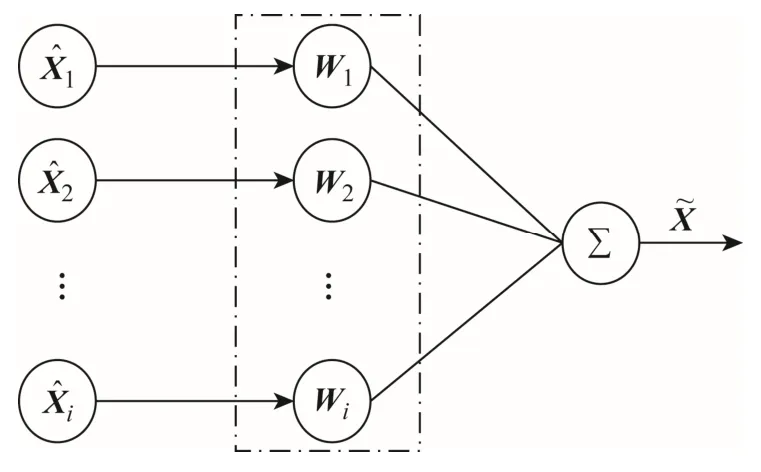
圖1 加權數據融合
定義n個多傳感器的軌跡數據集為

式中Xi表示第i個傳感器的經緯度數據集,其中單傳感器的軌跡數據為

式(2)中Xtri為第i時刻的樣本點數據,為第i個樣本點的經緯度數據。
多傳感器數據的加權融合采用 1 維多源融合模型,即

各傳感器在不同場景下對導航精度的影響不同。本文提出采用層次分析法分別融合權重Wi,以獲得最終融合后的加權融合數據
1.2 層次分析法
層次分析法是利用定量信息使決策過程數學化,以解決多目標多準則下的復雜決策問題。模型分為3 層:最高層(目標層)為決策的目標,即要解決的問題;中間層(準則層)為考慮的因素,即決策的準則;最底層(方案層)為決策時的可選方案。基本步驟如下:
采用相對重要性標度,如表1 所示,定量化表征任意2 種不同因素對目標的影響程度。
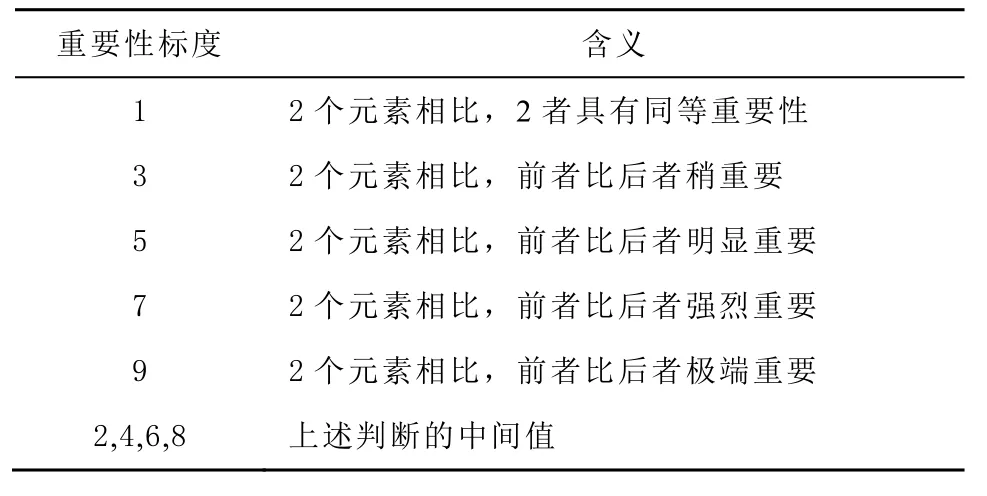
表1 重要性標度法
通過比較各個因素在各個層次之間的權重關系,構建相對重要性權重比較矩陣。特別地,權重比較矩陣采用一致性矩陣,以便于在此矩陣上獲得指標之間的權重。
定義①:若元素i與元素j的重要性之比為aij,則元素j與元素i的重要性之比為當滿足時,定義正互反矩陣B,為

定義②:滿足一致性約束條件的

正互反矩陣稱之為一致性矩陣。一致性矩陣使得指標之間相互重要性權重分配合理。
假定一致性正互反矩陣B的最大特征值λmax對應的特征向量根據矩陣B的子元素即最大特征值對應的特征向量歸一化后可得到所需的權重向量
然而,一般正互反矩陣并不滿足一致性。采用適當的松弛策略,對給定的正互反矩陣進行一致性檢驗,并以此來判斷由權重向量得出的權重分配是否合理。
定義③:層次一致性檢驗準則。引入一致性比例CR 來衡量權重分配的合理性,即

式中CI 為一致性指標,計算方法為

式中:λ為最大特征根;n為B矩陣的階數。RI為隨機一致性指標,此指標與權重矩陣的階數相關,階數越大,其出現隨機偏離的概率越大,定義為

RI 亦可通過矩陣階數查表得到。
一致性檢驗規則:當計算的CR <0.1時,認為正互反矩陣的一致性檢驗結果在可接受范圍之內;若CR ≥0.1,則認為此正互反矩陣不滿足一致性檢驗要求。
2 多場景多傳感器的自適應加權融合算法
傳統層次分析法解決對目標的 1 維權重決策方法;本文針對BDS 導航應用的多場景多傳感器自適應數據融合問題,提出擴展的 2 維權重層次分析優化決策算法。
假定在場景k時,n個傳感特征的正互矩陣為其n維特征向量為,則擴展為n個多傳感器m個多場景的權重矩陣為Wn·m=則m個場景自適應加權多源融合數據為

式中:列向量X1×n是融合前各個場景單源軌跡初始數據;Wn·m是n個多傳感器、m個多場景的 2 維自適應權重矩陣;列向量是各個場景多源融合軌跡數據。
首先,基于之前研究得到的BDS 導航實測場景聚類模型,對影響導航高精度目標的復雜場景實現自動聚類識別,以及定量化平均精度誤差。m種場景定義為

若將某類場景下某種傳感器數據作為 1 個評判特征,采用GNSS、RTK、INS 3 種傳感器數據在不同場景下的定位精度水平,對不同場景下各特征之間的相對重要性進行評判。
基于此得出多場景多傳感器的層次分析模型,其結構如圖2 所示。

圖2 多場景多傳感器層次分析架構
其中最高層目標層為最終要獲得的正互反矩陣,而準則層為精度聚類下的12 類導航場景,最后方案層為待融合的3 類傳感器數據。那么基于這樣的層次分析結構下的多元融合原理如圖 3所示。

圖3 基于層次分析的2 維數據融合
這種 2 維多源融合的方式引入了場景對導航性能的影響,在此融合方式下,令場景聚類中心k的平均精度誤差為δk,定義傳感器i相對于傳感器j在場景k下的相對重要性因子為

對各聚類場景,分別依據其平均定位誤差kδ遞減排序,然后對式(11)中的相對重要性因子進行歸一化處理,并將其映射到表 1 中的 1~9 級的標度區間,得到映射后的相對重要性因子,結合本文應用的3 種傳感器分別獲得各傳感器在各場景下的相對重要性因子,如式(12)~式(14)所示。
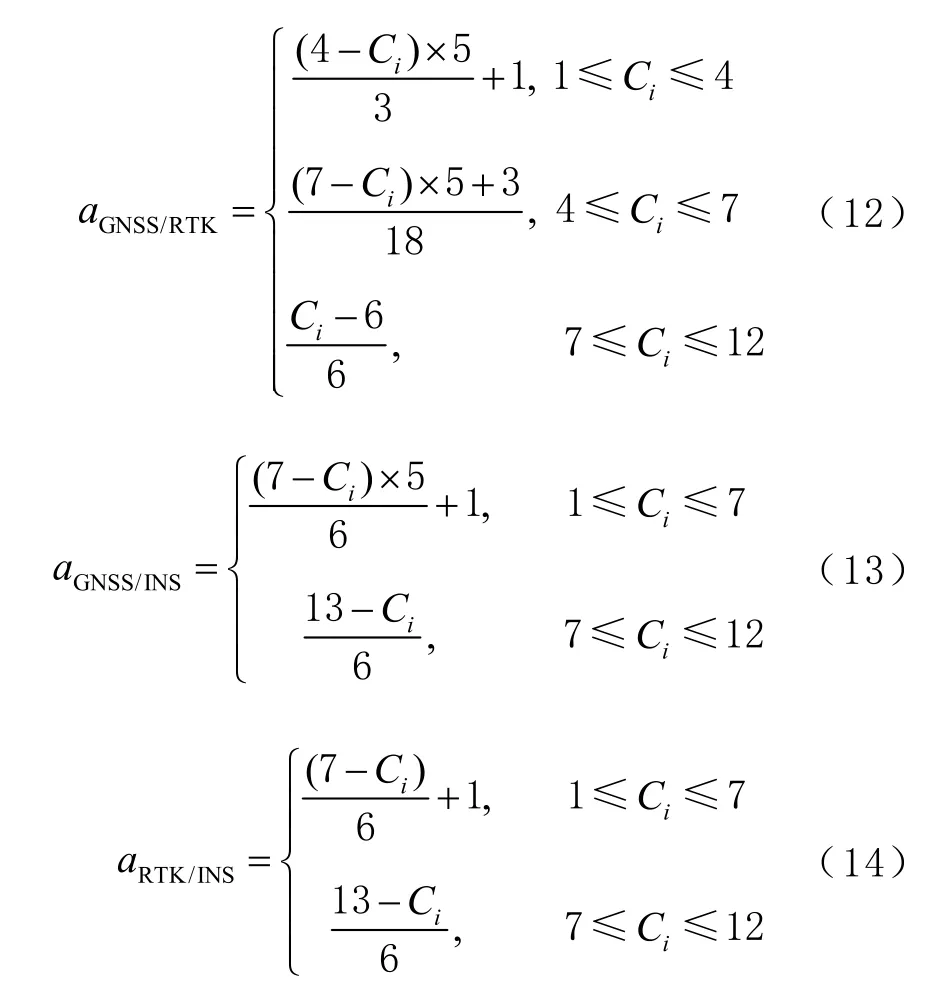
式中:ai/j表示i傳感器數據相對于j傳感器數據的重要性;Ci表示第i類場景類別。
結合場景差異與傳感器特性,依據式(5)針對不同場景,設計構建3 × 3維度傳感特征重要性矩陣,具體定義為

基于此矩陣來獲得對應于該場景的各傳感器數據的決策權重。一般地,對于m個場景n個傳感器的2 維相對重要性權重,傳感器分別由m個Bn·n的特征向量獲得。
基于場景的自適應融合的軌跡數據結果為

式中

最后對融合后各場景下的傳感器權重分配結果進行一致性檢驗,本文中n=3, 查表RI=0.53,分別代入式(6)和式(7),得到一致性檢驗準則為

綜上所述,依據新算法進行自適應數據融合的主要步驟為:①基于實測數據的統計分析得出各傳感器在不同場景下的精度均方誤差,并以此來計算各場景下兩兩傳感器數據的相對重要性因子;②基于各傳感器之間的相對重要性因子,參照1~9 級標度法構建正互反矩陣B;③計算正互反矩陣B的最大特征值λ對應的特征向量為各場景下、各傳感器自適應加權數據融合的權重。
3 實驗與結果分析
3.1 BDS 導航路測環境及數據
本文采用上海地區不同道路、場景多樣化的地理軌跡數據,作為此次數據融合的原始數據集。此段路程使用 3 個地理位置傳感器,并跑測 3 套數據集,包括 GNSS 經緯度數據、RTK 修正經緯度數據、INS 修正經緯度數據。導航路段環境包括隧道、城市街區、城市峽谷、林蔭、城市廣場、高架下、機場區域、開闊地、河道、高架上等多種復雜場景。
按照定位精度將場景自動聚類為12 類,場景類型按導航精度遞減排序。
3.2 加權融合矩陣及權重向量
基于12 類場景進行各類傳感器的層次劃分。
依據式(11)~式(13)計算各場景下的傳感器相對重要性因子,通過式(15)計算得出12 類場景下對應的正互反矩陣為:


對于正互反矩陣進行列向量歸一化,并以算術平均后最大特征值對應的特征向量為權向量,權向量的計算結果為

最后進行一致性檢驗,計算其一致性比例CR,結果如表2 所示。

表2 基于12 類場景自適應權重的一致性比例
從表2 可以看出,所有正互反矩陣都滿足一致性比例CR <0.1的條件,其中場景 2 和場景 12 的一致性比例非常低,表示在這 2 類場景下的權重分配非常合理,基于此權重的多傳感器數據融合效果也比較理想。由于12 類場景的正互反矩陣的一致性都在可接受的范圍內,那么所計算的權值向量也是合理的取值。
3.3 數據融合效果比較
圖4 為在高樓遮擋路段,使用單RTK 傳感器導致定位誤差的情況;圖5 為在林蔭遮擋路段,使用單慣導傳感器導致定位誤差的情況。
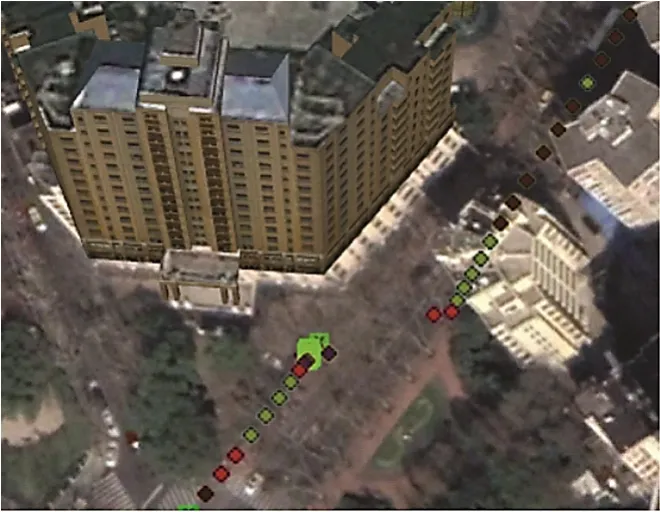
圖4 RTK 問題路段

圖5 慣導問題路段
從圖4 中可以看出,在單RTK 修正的情況下,基站信號和衛星定位信號被大型建筑物遮擋時,由于無法獲得定位信息,導致部分路段出現斷層,無法得到定位服務。而從圖5 可以看出,在單慣導修正的情況下,遮擋較為斷續時,衛星失鎖頻繁,單靠慣導來定位,時間超過 1 min 便會出現定位嚴重漂移的情況,導致定位服務無法正常使用。通過3 種傳感器自適應數據融合,使得整個測試路段的平均定位精度要高于單個傳感器的定位精度。部分測試路段的原始GNSS 軌跡如圖6 所示,而通過3 種傳感器軌跡數據融合后的導航軌跡圖如圖7 所示。

圖6 單GNSS 數據軌跡結果

圖7 3 種傳感器軌跡自適應融合結果圖
從圖6、圖7 可以看出,用單GNSS 定位,在城市復雜場景下的定位效果顯然不理想,因此需要進行針對性的精度補償。用 3 種傳感器進行自適應融合后,軌跡在大部分場景下都有所優化,例如:在開闊地路段通過 GNSS 已基本能夠實現有效定位;而在隧道高架下等無法接收導航衛星信號的場景下,IMU 能夠通過自身狀態實現有效定位;在遮擋嚴重的林蔭路段,通過RTK 的差分補償可以實現有效定位,這很大程度上提升了已有傳感器的定位精度。具體各傳感器以及多源融合導航的定位效果如表3 所示。

表3 多傳感器定位精度
從表3 中可以看出,雖然會出現最好定位精度比各單傳感器略差的情況,但平均定位精度和最差定位精度卻遠好于各單傳感器的定位效果,并且符合較高精度(將定位精度小于 2 m 的數據看成是較高精度的定位數據)數據的比例也有很大的提升。因此,多傳感器融合定位可發揮各個傳感器的優勢,以獲得大部分場景下的高精度定位,這對未來BDS 高精度導航應用具有參考價值。
4 結束語
本文主要介紹了軌跡數據融合,通過層次分析法,將各傳感器基于不同場景的重要性用來構建權重矩陣,并依據矩陣獲得的歸一化特征向量作為權重,對精度聚類后的 12 類場景進行自適應加權數據融合;然后通過一致性檢驗來評判在各個場景下,多傳感器比重的合理性,以得到場景適應性良好的多源融合數據。對比融合數據和單傳感器的定位數據,發現除了少量最優定位精度略有不足外,平均定位精度、最差定位精度以及高精度數據比例較之單傳感器定位的情況都有明顯的提升。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
今日農業(2021年19期)2022-01-12 06:16:36
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中老年保健(2021年11期)2021-08-22 03:15:44
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:02
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中國生殖健康(2020年4期)2021-01-18 02:58:26
現代出版(2020年3期)2020-06-20 07:10:34
甘肅教育(2020年21期)2020-04-13 08:09:24