一種基于近景攝影測量的隧道維護裝置導航方法
2020-08-25 13:29:46王佩賢金澤林張恒璟蘭文琦崔東東楊雄丹
導航定位學報 2020年4期
關鍵詞:測量
王佩賢,金澤林,張恒璟,2,蘭文琦,崔東東,2,楊雄丹
(1. 遼寧工程技術大學 測繪與地理科學學院,遼寧 阜新 123000;2. 中國測繪科學研究院,北京 100830)
0 引言
近景攝影測量具有非接觸式測量、方便攜帶、設站靈活、能在復雜環境下工作及測量精度高等特點,在實際工程中得到了廣泛的應用。文獻[1]將布設好編碼點的金屬架作為控制裝置,利用全站儀對金屬架上的編碼點實施高精度標定,現場布設像控點,采用數碼相機,通過近景工業攝影測量技術進行隧道的變形監測。驗證了數字近景工業攝影測量技術在解決隧道結構的變形測量上的可行性與精準度。文獻[2]通過確定各種拍攝距離下控制點的最佳尺寸,以及通過對控制點網型的試驗得到了控制網的布網原則,最終將近景攝影測量的方法應用到基坑的變形監測中。文獻[3]為解決目前煤礦巷道、隧道以及立井等地下狹窄范圍內各種因素導致的測量難已完成的問題,采用數字近景工業攝影測量方法,通過改變相片數量、攝影測量靶標位置以及拍攝網形,對比精度分析結論,為地下狹長空間內的測量工程提供參考。
上海硬 X 射線自由電子激光裝置[4-6]總長約3 000 m,主體裝置位于地下30 m 深的隧道和豎井中,在運行時具有較強輻射,需要實時提供隧道維護裝置的導航位置信息以進行固放功率源破損模塊的自動化更換。因隧道內環境復雜,前后無法通視及信號微弱等問題,傳統測量方法無法獲取準確的位置信息。為此提出1 種基于近景攝影測量技術的隧道維護裝置導航方法,通過對單相機攝影測量系統進行改進,加密攝影測量控制網,在加密控制網的基礎上,進行后方交會解算隧道維護裝置導航位置信息,為維護儀器在隧道內實現高精度、高效率、自動化工作提供基礎位置信息。
1 單相機攝影測量系統
單相機攝影測量系統是在被測物周圍布設合理的編碼標志后,根據工業相機在不同位置與方向對被測物拍攝2 幅以上的影像,照片在攝影測量軟件中經過圖像掃描后,因編碼點設計的特殊性,在攝影測量處理軟件中能夠快速被識別和定位,同時通過編碼點實現影像間的拼接,再通過三角交會和光束法平差后得到待測物體的 3 維坐標[7]。
單相機攝影測量系統由測量標志、基準尺、高精度單相機、攝影測量系統數據處理軟件 4 個部分構成。
1.1 測量標志
編碼標志的主要作用是通過編碼點實現所有影像的拼接,同時拼接影像內所有測量點,獲取測量點在像空間坐標系下的3 維坐標,所以需要在現場布設合理的編碼標志。本項目最長測量范圍達 1.4 km,共需兩千多個具有獨立身份(identity, ID)的測量標志點。目前采用8 點編碼標志進行編碼,只能形成 500 個不同的排列組合,即500 種不同編碼標志。8 點編碼標志如圖1(a)所示。為了適應本項目應用需求,重新設計10 點的編碼標志,可形成百萬量級編碼標志點,如圖1(b)所示。
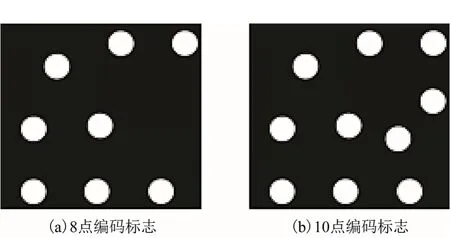
圖1 近景攝影測量標志
相機拍攝時,合適的光線入射角為 0°~60°。上海硬 X 射線自由電子激光裝置項目的隧道最長為1.4 km,直徑約為7 m,它是1 個狹長的測量區域,這種測量環境使得相機在拍攝過程中,不能始終保證入射光線有較好的入射角。為克服這一缺點,設計出了多面體編碼標志:這樣既保證了每個測量標志具有獨立的 ID,又保證了有足夠的加密控制點;相機在任何角度對測量標志進行拍攝時,均有光線入射以保證獲取照片的成像質量。
測量標志點的布設方案為:每隔2~2.5 m 布設五面體攝影測量編碼標志的控制點;4~5 m 布設一體化立體攝影測量標志,一體化立體攝影測量標志包含攝影測量靶球。用激光跟蹤儀通過對靶球進行測量,將其測量結果作為攝影測量靶球的已知值。
一體化立體攝影測量標志為攝影測量系統和激光跟蹤儀共同使用,五面體測量標志為攝影測量系統所用。2 種多面體編碼標志如圖 2(a)和圖2(b)所示。

圖2 近景攝影測量編碼標志
攝影測量控制網加密過程中,需要激光跟蹤儀提供初始點位坐標,同時激光跟蹤儀和攝影測量系統均能準確識別出攝影測量靶球,因此在隧道中布設攝影測量控制點時,可以采用一體化立體攝影測量標志來滿足該測量的需求。
1.2 基準尺
精度高且穩定的基準尺可為攝影測量提供高精度的長度基準;攝影測量系統具有可在非常規環境下工作的優勢,所使用的基準尺由特定材料制成。通常情況下,采用因瓦合金制作成基準尺,因瓦鋼基準尺在溫度和濕度不穩定情況下,可保持基準尺精度變化極小,熱膨脹率一般為 2×10-6/℃,可以在為標定測量時提供穩定且高精度的長度基準。考慮到隧道內環境復雜,放置的基準尺可能會產生偏移,進而導致測量誤差的出現;所以本次測量采用激光跟蹤儀對攝影測測量靶球進行測量,將測量所得2 個靶球點之間的距離代替基準尺。測量區域內每4~5 m 有2 個一體化立體測量標志,所以控制測量點較多,這樣既可以為攝影測量控制網提供穩定的長度標準,也便于不同攝站坐標系的統一。
(2)優化業務流程,促進財務與業務系統的深度融合。優化財務業務流程,將財務信息處理嵌入到高校其他業務處理過程中。在科研立項、資產購置等業務活動發生過程中,通過財務數據的嵌入和提取,使財務系統能夠按照一定的信息處理規則生成并集成信息,同步完成后續的審核、入賬等財務相關業務。通過業務流程、財務處理流程、管理流程的緊密合作,促進高校信息系統的資源共享,優化業務處理流程,減少審批手續環節,減輕財務工作量,同時實現會計的事中控制,提高預防風險的能力。
1.3 高精度工業測量相機
高精度工業測量相機主要由工業相機和主動照明光源(閃光燈)組成,工作人員手持相機,根據現場環境編碼點布設情況,獲取被測物不同方向和位置的影像,經由攝影測量處理軟件對影像進行自動處理后,獲取被測物相關信息。本文所使用的高精度相機參數如表1 所示。

表1 高精度相機參數
1.4 攝影測量處理軟件
攝影測量處理軟件采用自主研發的IDPMS 數字攝影測量軟件,通過對測量中獲取的照片進行掃描、標志識別和定位、像點匹配、圖像拼接、三角交會和光束平差后等步驟,可以得到攝影測量坐標系下編碼標志點的三維坐標。
2 隧道攝影測量控制網加密
考慮到本項目中控制點數目較少,為適應全向輪移動平臺的導航需要,結合隧道內的實際情況,必須對攝影測量控制網進行加密以提高攝影測量精度。加密控制網的精度也是檢驗控制網的重要指標。
2.1 控制網布設和測量
控制網布設(如圖3(a)所示),控制網布設完成之后即可進行測量,其測量步驟為:①采用激光跟蹤儀對一體化立體測量目標上攝影測量靶球進行測量,獲取靶球點在激光跟蹤儀坐標系下的3 維坐標;②采用攝影測量系統對一體化立體測量標志進行測量,獲取隧道布設的控制網點的 3 維坐標。攝影測量靶球經過激光跟蹤儀和單相機拍攝后,可將靶球作為公共點,通過坐標轉換,將隧道中布設的所有控制網點轉換到激光跟蹤儀坐標系下,完成隧道內攝影測量控制網的加密(如圖 3(b)所示)。

圖3 控制網布設及測量
2.2 控制網測量精度
對攝影測量靶球進行測量后,應用光束法平差模型[8]獲得像點殘差。將攝影測量獲得的靶球點位3 維坐標與激光跟蹤儀測得的靶球點位3 維坐標進行對比,以反映本次測量的整體質量,結果如表2所示。其中dX、dY、dZ為點坐標差值,用均方根(root mean square,RMS)來評定控制網精度。

表2 相機內參標定驗證結果
3 隧道維護裝置導航位置和精度計算
導航位置測量時,相機控制網布設在寬度為200 mm 的狹長區域內,2 m 左右布設2 個立體攝影測量標志。全向輪移動車上安裝有導航測量雙相機,相機對控制網上的標志進行測量,采用后方交會原理,實現全向輪移動車的定位。導航測量相機的相機分辨率為 4 112×3 008 個像素,像元大小為5.5 μm,相機焦距為8 mm。單臺相機的測量范圍為 5.5 m×5.5 μm、視場角約為 70°,2 臺相機夾角為60°,根據三角函數可知,2 臺相機共能觀測到8~10 個立體攝影測量標志。通過后方交會測量,可解算出相機在隧道中的位置。
選擇 4 點后方交會方法進行導航測量精度評定[9],其計算公式為
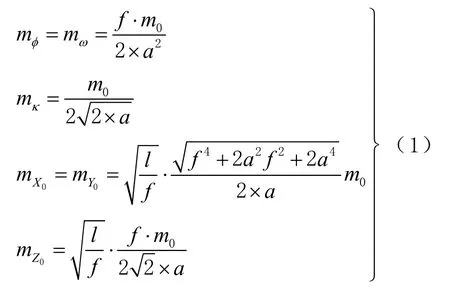
式中:m0為測量中誤差(像素識別誤差);f為相機焦距;a為目標成像尺寸的 1/2;l為測量距離;及mκ分別為旋轉后φ、ω及κ方向上的測量中誤差;分別為X、Y及Z方向的測量中誤差。
在實驗室環境下,標志中心提取精度可以達到1/50 個像素,工程環境下,一般按照1/20 個像素計算,則測量中誤差m0=0.000 275 mm,f=8 mm;按照 1 個相機拍攝 4 m 范圍內 6 個測量標志點計算,a=9 mm,測量距離按照測量光線的最大斜距4.5 m 計算。將以上參數帶入精度評定公式中,可得:
4 實驗與結果分析
進行本次測量項目之前,運用本文的方法進行了驗證試驗,即采用導航相機,對某地下隧道近60 m 的控制場進行測量,通過實驗模擬本次項目所需的精度要求。在實驗隧道中,為符合項目實際情況,模擬隧道內的編碼標志布設情況(編碼點分布間隔為2~2.5 m,隧道中還有部分編碼點布設在電源機柜上,相機可拍攝到的編碼點較少),采用完成標定的2 臺工業相機呈60°夾角,對實驗隧道中的編碼標志進行拍攝。將拍攝得到的影像經過IDPMS 軟件進行處理,并與激光跟蹤儀的測量結果進行比較。通過多次試驗,證明其測量精度可達0.458 mm。
攝影測量控制網加密完成后,隧道內控制點的坐標均為已知。在維護裝置接受到中控指令,需要更換損壞插件時,導航雙相機通過對隧道兩側的控制點拍攝,獲取其影像坐標。利用加密時已知控制點的坐標和導航相機攝獲的編碼點影像坐標,通過后方交會原理,可解算出相機在隧道內位置信息。本文通過多次拍攝獲取重復性精度如表3 所示。由表3 可以知:X方向最大誤差為0.58 mm;Y方向最大誤差為0.66 mm;Z方向最大誤差為0.30 mm。
由于隧道中的控制點呈狹窄的長條狀分布,網型較差,根據測量經驗[10-12],狹窄的長條狀網型將大幅降低測量精度,結合隧道中其他不可控因素的影響,3 個方向的定位精度一般會低于實驗室環境下的精度。若參與計算的點越多,后方交會的精度則越高。模擬實驗和誤差理論分析結果表明,控制系統的定位精度在5 mm 以內,可以為隧道維護裝置提供準確導航信息。

表3 后方交會的重復性檢驗
5 結束語
本文針對隧道實際環境下,對單相機攝影測量系統進行了具體設計,改進了編碼標志、基準尺及攝影測量處理軟件,設計和改進的攝影測量系統能夠滿足隧道內實際測量需要。利用近景攝影測量技術對隧道內編碼標志進行拍攝和解算,應用后方交會獲取相機在隧道內的位置,通過理論論述和模擬實驗表明,采用數字近景工業攝影測量技術的導航方法能夠保證5 mm 以內的定位精度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00