基于AMESim 的飛機環(huán)控系統(tǒng)建模與仿真
2020-08-14 09:13:28周瓊瑤王宇迪
科技視界 2020年22期
關(guān)鍵詞:模型
劉 征 崔 燚 周瓊瑤 戴 錚 王宇迪
0 引言
為體現(xiàn)新型民用客機“更經(jīng)濟、更安全、更舒適、更環(huán)保”的設(shè)計思想[1],民用飛機逐漸朝多電化方向發(fā)展,四輪升壓式高壓除水電動環(huán)控系統(tǒng)具有取消發(fā)動機做功影響、節(jié)省燃油以及防止渦輪冰堵等優(yōu)點[2-3],越來越受到研究人員的重視。
國內(nèi)對飛機環(huán)控系統(tǒng)仿真研究始于20 世紀(jì)90 年代,李俊杰[4]、董素君[5]等人采用easy5 軟件建立起空氣循環(huán)制冷系統(tǒng)和蒸發(fā)循環(huán)制冷系統(tǒng)仿真模型,具有一定的實用性和推廣價值。董素君[6]、宋俊虓[7]、趙俊茹[8]等人利用Matlab/Simulink 建立起環(huán)控系統(tǒng)各主要部件的數(shù)學(xué)模型,對系統(tǒng)進行了仿真研究,Matlab/Simulink 屬于通用仿真軟件,具有強大的編程計算語言和圖形化建模方式,但是在復(fù)雜系統(tǒng)的仿真研究,易產(chǎn)生代數(shù)環(huán)問題,對計算結(jié)果精度和效率影響較大。
AMESim 屬于一維多學(xué)科復(fù)雜系統(tǒng)建模仿真平臺,可實現(xiàn)氣動、熱流體、液壓、機械和電磁等多學(xué)科領(lǐng)域的聯(lián)合建模仿真,可以實現(xiàn)機電系統(tǒng)中多個分系統(tǒng)的耦合工作[9]。本文通過建立環(huán)控系統(tǒng)仿真模型,得到了在給定狀態(tài)下各部件出口的穩(wěn)態(tài)仿真結(jié)果與理論計算值的對比結(jié)果,以及給定在飛行高度和飛行馬赫數(shù)擾動下的二級渦輪出口溫度的動態(tài)響應(yīng)曲線,可為系統(tǒng)設(shè)計優(yōu)化以及整機環(huán)境控制系統(tǒng)的控制規(guī)律設(shè)計提供模型和數(shù)據(jù)支持[10]。
1 AMESim 仿真模型
四輪升壓式高壓除水電動環(huán)控系統(tǒng)主要部件有:熱交換器、壓氣機、渦輪冷卻器、風(fēng)扇、轉(zhuǎn)軸等,通過氣體能量傳遞方向?qū)⒉考鞣抡婺K連接起來,構(gòu)成整機系統(tǒng)進行仿真。四輪升壓式高壓除水電動環(huán)控系統(tǒng)原理圖見圖1。AMESim 搭建空氣循環(huán)制冷系統(tǒng)模型,需用到濕空氣模型、流量源、壓力源、熱交換器、壓氣機、渦輪冷卻器、水分離器、導(dǎo)管等元件(即子模型)。四輪升壓式高壓除水電動環(huán)控系統(tǒng)AMESim 仿真模型見圖2。

圖1 四輪升壓式高壓除水電動環(huán)控系統(tǒng)原理圖

圖2 環(huán)控系統(tǒng)AMESim 仿真模型
2 系統(tǒng)仿真
2.1 仿真參數(shù)設(shè)置
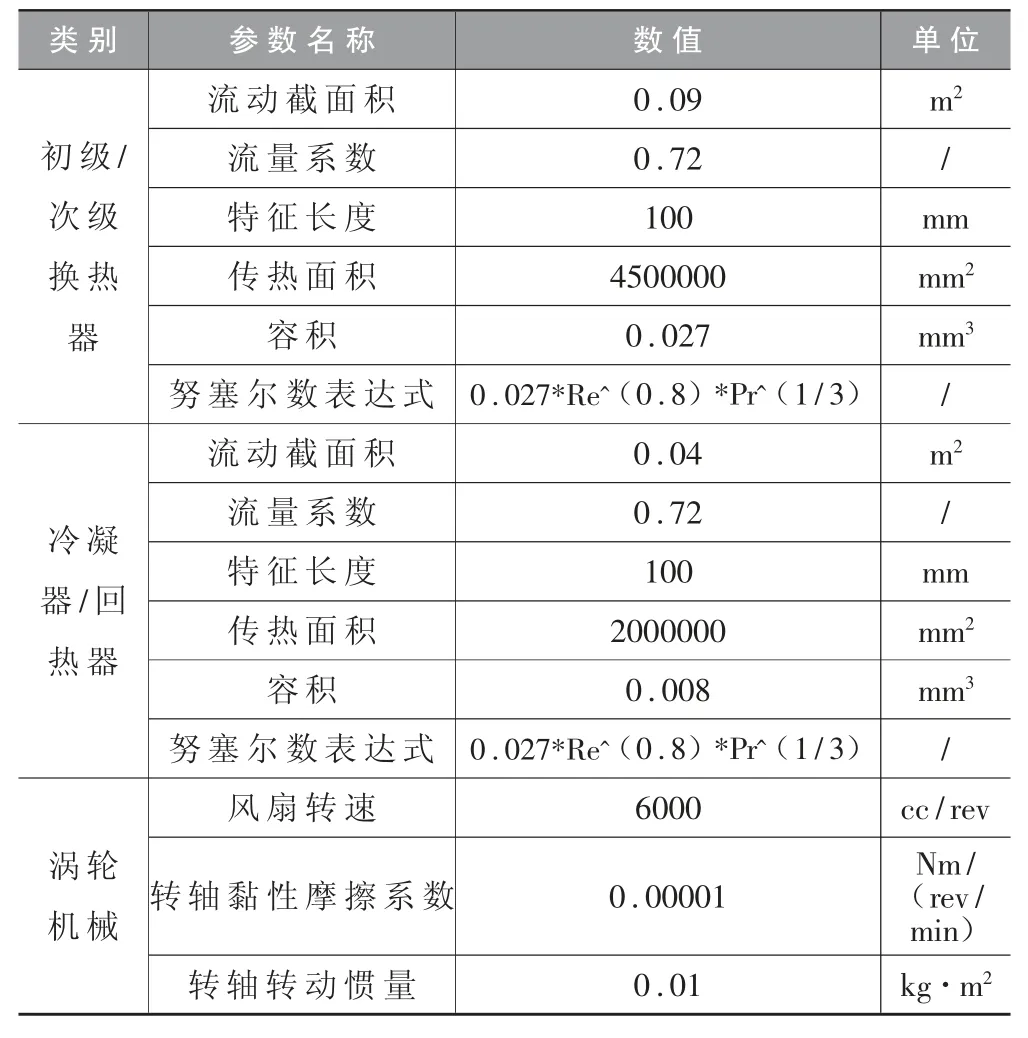
表1 AMESim 仿真模型輸入?yún)?shù)
AMESim 仿真模型建立后,需要給定系統(tǒng)各部件的仿真輸入?yún)?shù),仿真輸入?yún)?shù)主要以部件結(jié)構(gòu)尺寸為主,具體參數(shù)見表1。
2.2 穩(wěn)態(tài)仿真結(jié)果分析
穩(wěn)態(tài)仿真主要考慮地面狀態(tài)和高空巡航狀態(tài)兩個工況,選取不同工況入口狀態(tài)參數(shù)見表2。

表2 AMESim 仿真模型不同工況入口狀態(tài)參數(shù)
依據(jù)部件結(jié)構(gòu)尺寸和入口參數(shù),經(jīng)過計算可得到該型號飛機的各部件出口理論計算值。將理論計算值與穩(wěn)態(tài)仿真計算進行對比,可得到靜態(tài)仿真的精度。表3 是系統(tǒng)給定狀態(tài)下,各部件出口溫度理論計算值與穩(wěn)態(tài)仿真結(jié)果的對比。

表3 系統(tǒng)關(guān)鍵點穩(wěn)態(tài)仿真值與理論計算值對比
仿真結(jié)果表明,本文所建模型具有較高的精度,可滿足飛機環(huán)控系統(tǒng)的仿真研究。
2.3 動態(tài)仿真結(jié)果分析
由于飛機飛行高度和飛行速度不斷發(fā)生變化,外界空氣溫度和壓力會發(fā)生較大變化,環(huán)控系統(tǒng)各狀態(tài)點也會發(fā)生較大的變化,會對控制系統(tǒng)提出更高的要求。電動環(huán)控系統(tǒng)取消了發(fā)動機引氣,改為電動壓氣機壓縮空氣充當(dāng)高壓氣源,在整個飛行任務(wù)過程中,外界環(huán)境的溫度和壓力對環(huán)控系統(tǒng)影響較大。因此本文將研究當(dāng)飛機飛行高度和馬赫數(shù)擾動下,環(huán)控系統(tǒng)入口溫度和壓力不發(fā)生變化情況下,二級渦輪出口的溫度響應(yīng)。
工況1,飛行高度0m,馬赫數(shù)0.3,當(dāng)飛行馬赫數(shù)不變,高度突然階躍至1000 米時,二級渦輪出口的溫度變化如圖3 所示,由仿真曲線可以看出,當(dāng)飛行高度增大時,外界空氣溫度降低,初級換熱器和次級換熱器將帶走更多熱量,因此二級渦輪出口溫度降低。
工況2,飛行高度0m,馬赫數(shù)0.3,當(dāng)飛行高度不變,馬赫數(shù)由0.3 增大至0.5,二級渦輪出口溫度變化如圖 4所示,由仿真曲線可以看出,在地面高度0m,當(dāng)馬赫數(shù)增大時,二級渦輪出口溫度增高,這是因為馬赫數(shù)增大,沖壓空氣進口溫度增高,初級和次級換熱器溫差變小,帶走的熱量也減少,因此二級渦輪出口溫度增高。

圖3 工況1 條件下二級渦輪出口溫度變化

圖4 工況2 條件下二級渦輪出口溫度變化
3 結(jié)論
本文利用AMESim 搭建起四輪升壓式高壓除水電動環(huán)控系統(tǒng)仿真模型,根據(jù)氣體流動方向?qū)⒏鞣抡婺K連接起來,并對環(huán)控系統(tǒng)進行了靜態(tài)仿真計算和動態(tài)仿真分析。靜態(tài)仿真計算結(jié)果與理論結(jié)算結(jié)果相比,最大相差2.91℃,動態(tài)仿真滿足實際系統(tǒng)的變化趨勢。仿真結(jié)果表明了所建模型的正確性,可以模擬不同狀態(tài)下的飛機環(huán)控系統(tǒng)的工作情況,可為后續(xù)飛機環(huán)控系統(tǒng)的設(shè)計優(yōu)化提供依據(jù),同時也可以為控制系統(tǒng)的設(shè)計提供模型和數(shù)據(jù)支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
