可移動智能垃圾桶定位及檢測技術(shù)
2020-08-12 12:00:24吳劍英平雪良張逸倫陳祥馬博琳劉家威
機械制造與自動化 2020年4期
吳劍英,平雪良,張逸倫,陳祥,馬博琳,劉家威
(江南大學(xué),江蘇 無錫 214122)
0 引言
隨著機器人技術(shù)的快速發(fā)展,機器人的應(yīng)用在各行各業(yè)迅速展開,生活中機器人的應(yīng)用也正在悄然興起,如自動清潔機器人等,但其應(yīng)用還不成熟多見[1]。目前,移動機器人的技術(shù)以及室內(nèi)定位技術(shù)發(fā)展較快并相對成熟,廣泛應(yīng)用于各種領(lǐng)域。隨著手機的普及,智能時代正在到來,用手機APP來進行控制也非常方便和簡單。據(jù)文獻及專利調(diào)查,目前國內(nèi)市面上的智能垃圾桶大多只有簡單的自動開合蓋子、自動套袋等功能,具有可移動及垃圾滿溢檢測的智能垃圾桶并不常見。
本文旨在解決現(xiàn)有技術(shù)中存在的問題,提供一種智能垃圾桶定位及檢測技術(shù)。主要包括以下內(nèi)容:1)移動平臺的室內(nèi)定位。室內(nèi)定位技術(shù)是機器人控制技術(shù)研究方向中一個非常重要的問題,到目前為止,室內(nèi)定位技術(shù)主要有相對定位以及無線定位兩大類。相對定位技術(shù)主要原理是在測量移動平臺相對于初始位置的方位及距離后,再由初始位置以及測量信息確定機器人的當前位置。常用的傳感器包括光電編碼器、里程計及慣導(dǎo)系統(tǒng)(如速度陀螺、加速度計等)。無線定位技術(shù)目前主要有3種定位技術(shù):ZigBee 定位技術(shù)、WiFi 定位技術(shù)、UWB 定位技術(shù)[2-3]。考慮到與手機的通信,本文的設(shè)計優(yōu)選WiFi定位技術(shù)。2)路徑規(guī)劃。依托于CCD相機,激光測距傳感器等,基于SLAM算法構(gòu)建室內(nèi)地圖可較好地實現(xiàn)路徑規(guī)劃[4]。3)垃圾桶滿溢檢測。市面上智能垃圾桶僅具有自動開合的功能,結(jié)構(gòu)單一,普及率不高。本文設(shè)計的智能垃圾桶在涵蓋傳統(tǒng)垃圾桶所具備功能的同時,采用紅外檢測技術(shù)實現(xiàn)垃圾桶滿溢檢測的功能。
1 總體設(shè)計方案
本文機器人移動平臺以一臺三輪式雙排全向輪底為基礎(chǔ),系統(tǒng)利用陀螺儀以及直流電機的差速轉(zhuǎn)動實現(xiàn)循跡。采用三輪速度的不同組合方式完成二維平面內(nèi)任一方向的移動,利用激光測距傳感器進行測距,實時處理分析已收集到的數(shù)據(jù)信息,進而實現(xiàn)避障功能,很好地解決了機器人的路徑規(guī)劃問題[5-6]。針對機器人定位問題,本文采用WiFi定位技術(shù)。由于周圍環(huán)境對機器人定位算法有一定的影響,通過分析幾種常見的距離判斷算法,經(jīng)過實驗,為機器人規(guī)劃出一塊確定的運動與識別區(qū)域,實現(xiàn)了機器人的定位功能。針對垃圾桶滿溢檢測及桶蓋智能開合問題,本文采用紅外檢測技術(shù),在內(nèi)桶頂部搭載一對射式紅外傳感器,若檢測到垃圾滿溢則通過WiFi通信向用戶發(fā)出信號。在外桶蓋頂部搭載一反射式紅外傳感器,當有物體經(jīng)過垃圾桶,垃圾桶蓋打開,經(jīng)一段時間的延時,自動閉合。具體方案以及主要機械結(jié)構(gòu)和實物如圖1、圖2所示。
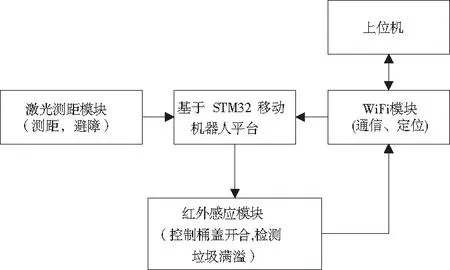
圖1 整體方案

圖2 智能垃圾桶主要結(jié)構(gòu)
2 移動底盤的定位及控制
2.1 移動底盤的定位
本設(shè)計中移動底盤的定位采用WiFi室內(nèi)定位技術(shù)。該技術(shù)根據(jù)定位過程中采用不同的硬件方法分為 AOA、TOA、TDOA、RSSI 定位。本文采用最常用的RSSI(基于信號強度的)定位技術(shù),測得定位環(huán)境中無線 AP 節(jié)點的信號場強度值后,根據(jù)該信號強度值,再基于已有的理論和經(jīng)驗建立距離與信號強度值的關(guān)系方程,由此根據(jù)信號強度值計算發(fā)射端和接收端之間距離,從而得到定位端的具體坐標值。因為WiFi信號收發(fā)兩端存在一定誤差,所以通過引入隨機變量xε,將隨機誤差的影響盡量降到最低[7]。 基于路徑損耗的對數(shù)衰減模型如下式所示:
RSSI是接收端在距離d處獲取到的無線 AP 節(jié)點的信號強度,單位是 dBm;RSSI0是常值,其大小取決于在參考距離d0處測量得到的無線 AP 點的信號強度;d為參考距離,一般選取為 1m;γ是路徑損耗指數(shù);xε是一個隨機數(shù),主要受信道噪聲和陰影的影響。
假設(shè)定位端可以接收到A、B、C 3個無線AP節(jié)點的信號,且3個圓兩兩相交,即可通過三角質(zhì)心算法確定定位端的坐標值[8]。三角質(zhì)心算法模型如圖3所示。
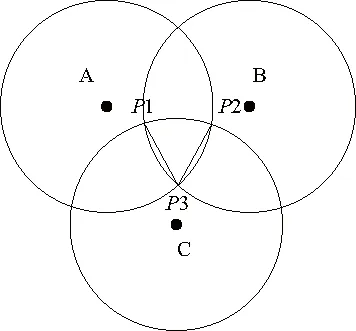
圖3 三角質(zhì)心算法模型
圖3中圓A、圓B交點P1的求解過程如下:
上述方程組的解即為P1的坐標,同理可求P2、P3;定位端坐標即為:
2.2 移動底盤的控制
底盤運動由ST的32位微控制器STM32F407ZGT6進行控制。該單片機板搭載112個可編程IO口以及大量的片上外設(shè),并含有ATK-RM04WiFi模塊,該WiFi模塊支持 RS232 串口、 LVTTL 串口,支持電壓工作范圍為DC6 V~16 V,支持串口轉(zhuǎn)以太網(wǎng)、串口轉(zhuǎn) WIFI STA、串口轉(zhuǎn) WIFI AP 等連接形式。同時, ATK-RM04 兼路由器功能,完全可以當成一個路由器使用,因而更方便用戶移動設(shè)備與底盤控制系統(tǒng)之間的實時通信。
移動底盤結(jié)構(gòu)如圖4所示。
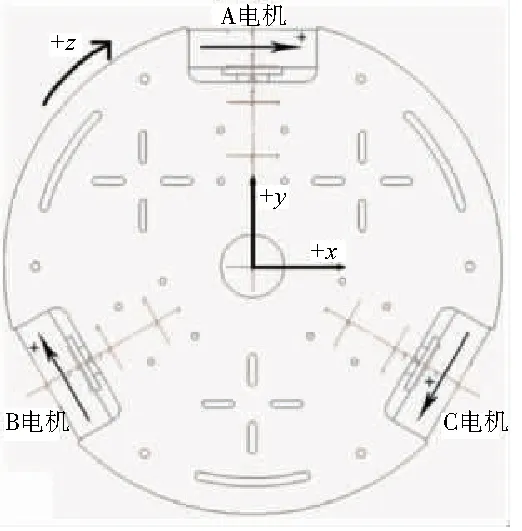
圖4 移動底盤模型
對底盤的移動進行運動學(xué)分析可以得到以下公式:
vA=-vx+ωr
其中:vA、vB、vC分別是3臺電機的轉(zhuǎn)速;vx、vy分別是以底盤中心為坐標原點建立的正交坐標系沿x、y方向的速度分量;ω為角速度;r為全向輪半徑。
根據(jù)以上原理,設(shè)置入口參數(shù)為x、y、z軸速度,通過C語言編程解算求出3臺電機的轉(zhuǎn)速,傳入位置PID控制器,通過不斷與目標點之間的矯正,最終到達目標點。
3 垃圾桶紅外檢測系統(tǒng)設(shè)計
文中設(shè)計的垃圾桶內(nèi)桶與外桶分離,利用電磁耦合技術(shù)連接上蓋座和外桶,極大地方便了內(nèi)桶的取出;上蓋座搭載一桶蓋開合檢測裝置,當用戶距離垃圾桶蓋上部15~20cm時檢測裝置收到信號,主控板向180°舵機發(fā)送1.5ms的脈寬,上蓋打開; 5s后自動關(guān)閉。該檢測裝置采用紅外發(fā)光二極管,應(yīng)用紅外反射光強法檢測桶蓋上部是否有物體靠近。具體方式為紅外管不斷發(fā)射調(diào)制后的信號,光敏管接收調(diào)制的紅外信號,原理如圖5所示。
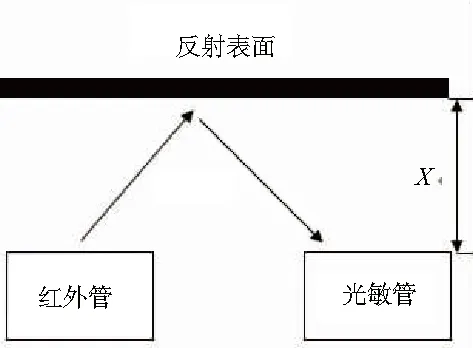
圖5 紅外發(fā)射接收原理
反射光強度的輸出信號電壓Vout是反射面與傳感器之間距離的函數(shù),設(shè)定輸出電壓達到某一閾值時舵機工作,帶動桶蓋打開,經(jīng)5s延時后桶蓋自動閉合。
在內(nèi)桶頂端置有一對射式紅外傳感器,常態(tài)下光敏管可接收到紅外信號,當垃圾滿溢時,紅外光被阻斷,光敏管接收不到信號,此時通過WiFi通信提示用戶“垃圾已裝滿”。紅外檢測程序框圖如圖6所示。
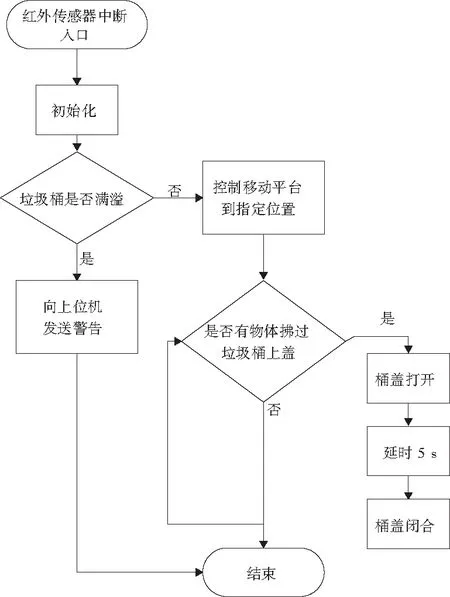
圖6 紅外檢測程序框圖
4 結(jié)語
本文采用的WiFi定位、WiFi通信、紅外檢測技術(shù),很好地解決了智能垃圾桶的遙控定位及檢測問題,提高了垃圾桶的定位精度以及垃圾桶滿溢檢測的實時性。在智能家居以及互聯(lián)網(wǎng)+的環(huán)境下,本文提出的定位及檢測技術(shù)將大大促進智能垃圾桶的發(fā)展。隨著本技術(shù)的普及,智能垃圾桶將更加深入居民日常生活,徹底改變?nèi)藗兊沫h(huán)境保護理念,用戶可通過手機等搭載WiFi模塊的上位機對智能垃圾桶進行傳呼,隨手將手邊垃圾丟入垃圾桶,這將極大提高居民生活環(huán)境的整潔度、舒適度。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
