基于RBF的掘進機自適應PID推進控制系統
2020-08-12 11:38:20蘇國亮
山西焦煤科技 2020年6期
蘇國亮
(山西焦煤集團 嵐縣正利煤業有限公司,山西 呂梁 033500)
煤礦掘進機在工作時主要依靠旋轉的截割機構將巖層進行破碎作業,掘進機工作時的掘進速度、工作壓力以及巖層硬度直接影響掘進機截割機構的輸出轉矩,決定著掘進機的實際工作效率[1]. 目前,對掘進機聯合控制系統的研究,并沒有對速度和壓力之間的相互影響因素進行分析,當作用在截割機構上的載荷沖擊忽然增大、截割機構推進油缸運行速度變小時,系統仍然會按預定的速度控制程序給出推進速度增加的信號,導致掘進速度出現反復的波動,嚴重影響掘進機的工作效率,降低了系統的工作可靠性。
為優化掘進機控制系統結構,提升掘進效率,以掘進機的掘進速度和系統的工作壓力為研究對象,將系統的壓力作為掘進機掘進速度調節的反饋信號,利用神經網絡對PID自適應控制進行調整,實現利用PID對系統溢流閥和速度調節閥的控制,精確調整比例閥的開口大小,確保掘進機的掘進速度和自適應控制器所設定的運行速度的吻合。
1 掘進機液壓推進系統的工作原理
掘進機推進系統的液壓原理見圖1,在執行推進作業時,液壓泵工作,將液壓油從油缸中抽出通過比例調速閥及電磁換向閥進入到推進油缸的無桿腔內,推進掘進機執行機構前進,在無桿腔進油的過程中同步調整溢流閥的壓力,確保無桿腔推進過程中壓力的穩定。設置在進油管路上的壓力變送器和執行油缸上的速度變送器分別實時監測系統的壓力和活塞桿的行程,經過自適應控制器的分析,發出反饋信號給調速閥,完成對液壓控制系統的調整。在該液壓推進控制系統中將在某個單位時間內的無桿腔工作壓力的均值作為調整推進速度的聯合控制輸入信號,系統的實際工作壓力大于設定壓力時推進速度的增量將保持恒定不變,如果實際工作壓力小于系統設定壓力,則系統的推進速度將由RBF-PID自適應控制器進行反饋調節控制。
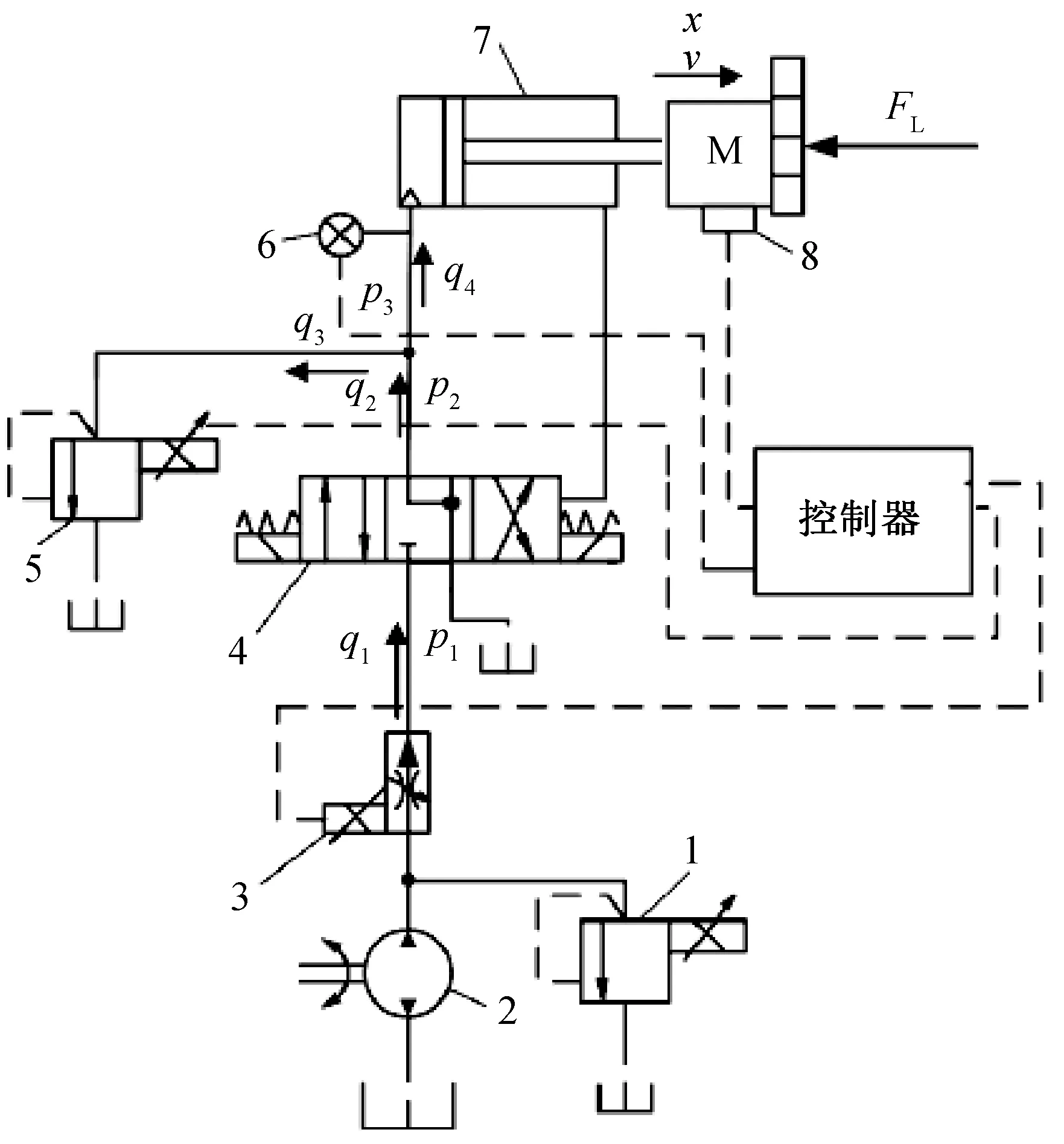
1—安全閥 2—液壓泵 3—比例調速閥 4—電磁換向閥 5—比例溢流閥 6—壓力變送器 7—執行油缸 8—速度變送器圖1 掘進機推進系統的液壓原理圖
2 掘進機液壓推進系統的建模
掘進機液壓推進系統在工作中,系統比例調速閥的流量方程可表示為:
q2=kq2y2
式中:
kq2—單位閥芯位移所對應的流量,L/min·mm;
y2—比例溢流閥的閥芯的位移,mm;
q2—比例調速閥的流量,L/min.
節流閥工作時閥芯的運動方程可表示為[2]:
式中:
D2—流體流動時的黏性摩擦系數;
FM2—閥芯運動時電磁鐵作用在閥芯上的推力,N;
k2—閥芯上復位彈簧的剛度,N/mm;
m2—節流閥的閥芯質量,kg.
推動油缸的連續性流量方程可表示為:
式中:
A—活塞桿的橫截面積,m2;
Ctc—液壓油的黏滯阻尼系數;
E—液壓油的體積彈性模量;
V—推動缸高壓腔的容積,L;
pL—負載的壓力,MPa.
推動油缸的活塞桿運動方程可表示為:
式中:
M—活塞桿及執行機構的總重量,kg;
FL—執行機構作用在活塞桿上的負載,N;
K—彈簧的負載剛度,N/mm;
BV—彈簧的阻尼系數;
x—活塞桿的位移,mm.
3 推進系統的RBF-PID自適應控制原理
RBF-PID自適應控制器包括PID控制器以及RBF神經網絡控制器兩個部分。RBF神經網絡控制器根據輸入的數據信息分析識別出該目標數據的近似數學模型,然后利用該數據模型替代所輸入的控制目標,同時對PID控制器的控制參數進行分析,實現數據目標的自適應調整,掘進機自適應推進控制系統的工作原理見圖2.
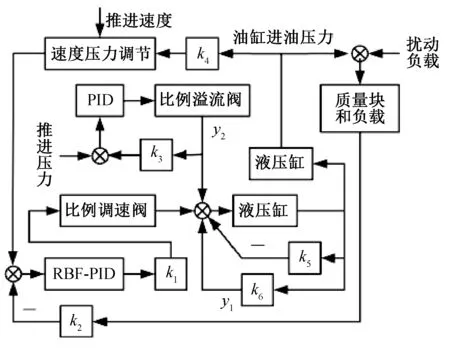
圖2 掘進機推進系統的自適應控制原理示意圖
由圖2可知,在該控制模式下,系統將掘進機的實際推進速度和推進油缸活塞桿的速度對比,計算出兩者之間的差值并輸入到自適應控制器中,在神經網絡控制器的作用下對輸入PID控制器中的數據信息進行不斷調整,確保掘進機的實際推進速度與系統設定速度的差值維持在要求的范圍內。系統同時會對推動油缸無桿腔處的壓力變化情況進行不間斷監測,若壓力已達到系統設定的壓力則將對掘進機的推進速度進行降速調整,避免作用在截割滾筒上的壓力過大損壞截齒,當壓力小于設定壓力時則增加推進速度,確保截割效率。
4 掘進機液壓推進系統工作特性的仿真分析
利用AMEsim仿真分析軟件建立掘進機液壓系統的系統模型,利用MATLAB仿真分析軟件建立自適應控制系統的模型[3],在進行聯合仿真分析時將應用系統中壓力調節閥和調速閥系統設定的目標值作為MATLAB的設定輸出值[4],液壓推進系統速度變化曲線見圖3.
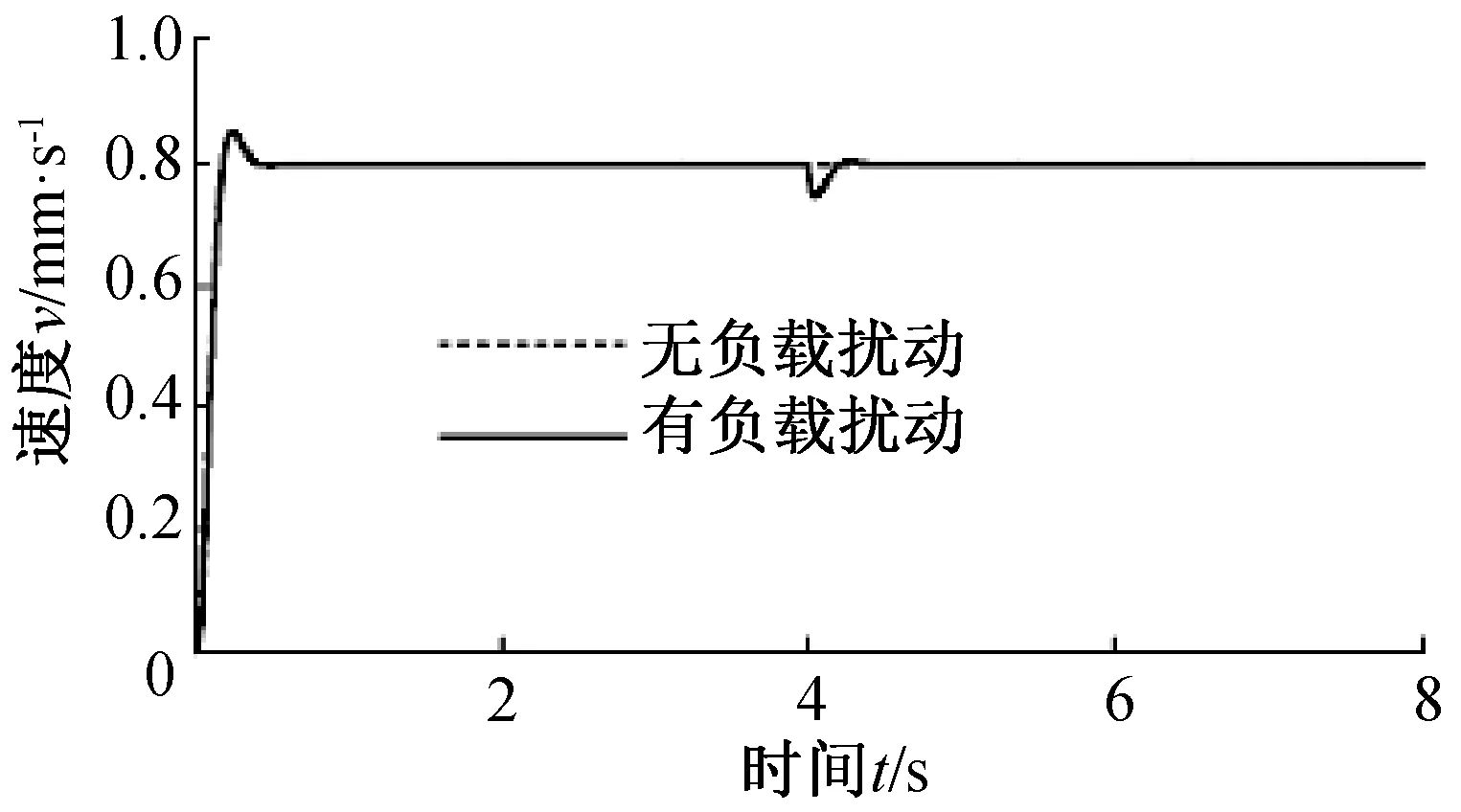
圖3 掘進機液壓推進系統速度變化曲線圖
由圖3可知,當在進行仿真分析時,將速度調節閥的目標速度設置為0.8 mm/s,在仿真開始的第4 s給系統一個60 kN的負載擾動,在聯合自適應控制器的作用下系統僅需約0.1 s即可恢復到穩定運行狀態并快速達到設定的速度。
推進油缸在負載突變情況下的控制輸出量變化曲線見圖4. 由圖4可知,在作用于截割機構上的負載發生突然增大時,系統并沒有將油壓信號作為速度調整的執行信號,而僅將其作為一個速度調節的參考量,當壓力達到設定值時控制器所輸出的速度調節增量為零,見圖4b)中的虛線。由此表明,在采用基于RBF的掘進機自適應PID推進控制系統調節的情況下能夠有效避免工作中掘進機掘進速度與工作壓力之間的協調性,避免出現壓力及速度突變的情況,維持掘進機截割推進系統的平穩運行。
5 結 論
通過對掘進機液壓推進系統工作原理的分析,建立了液壓推進系統的數學模型,利用AMEsim及MATLAB仿真分析軟件對掘進機掘進推進系統工作特性進行了分析,結果表明:
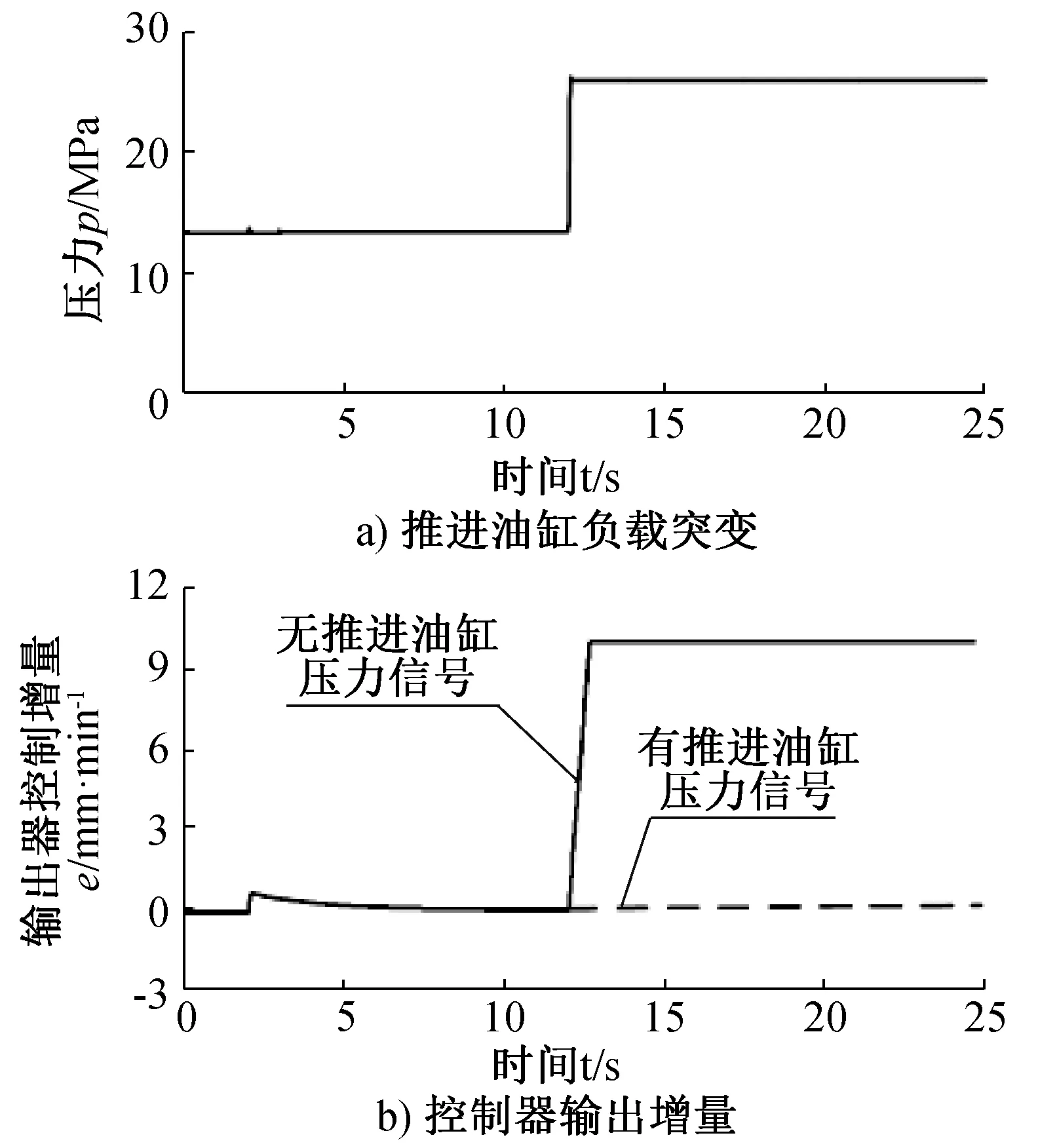
圖4 壓力突變時的控制器輸出變化情況圖
1) 在作用于掘進機截割機構上的負載出現突變時,該控制系統能夠對其進行快速響應,并確保推進系統的速度快速、平穩地達到設定值。
2) 利用系統工作壓力的變化作為速度調節修正信號,在兩者之間建立動態聯系能夠有效降低推進速度的調整誤差,確保速度調整的準確性。
3) 基于RBF的掘進機自適應PID推進控制系統能有效地提升掘進速度和工作壓力的匹配性,對外界負載擾動的抑制作用明顯,有效提升了掘進機的掘進效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44