方程式賽車滾子鏈鏈輪靜強(qiáng)度分析計(jì)算方法
2020-08-12 06:01:26于明杰黎奉常
科技與創(chuàng)新 2020年15期
于明杰,黎奉常
(武漢理工大學(xué) 汽車工程學(xué)院,湖北 武漢430070)
1 引言
鏈傳動(dòng)是一種撓性傳動(dòng),它由鏈條和鏈輪組成,過(guò)鏈輪輪齒與鏈條鏈節(jié)的嚙合傳遞動(dòng)力和運(yùn)動(dòng)[1]。相較于帶傳動(dòng),其傳動(dòng)時(shí)無(wú)打滑現(xiàn)象,安裝和制造成本較低,這對(duì)于對(duì)傳動(dòng)精確度要求較高、成本控制較為嚴(yán)格的方程式賽車是一個(gè)不錯(cuò)的選擇。而鏈輪作為賽車傳動(dòng)系統(tǒng)較為關(guān)鍵的零部件,為了實(shí)現(xiàn)輕量化,近年來(lái)在進(jìn)行設(shè)計(jì)時(shí)多采用鋁(7075-T6)材料,而該種鋁合金相對(duì)于通常采用的40Cr 合金鋼硬度較低,抗沖擊和抗磨損性能比較差,相對(duì)于采用合金鋼的鏈條更加容易損壞,所以著重對(duì)鏈輪進(jìn)行分析。
近年來(lái),國(guó)內(nèi)外對(duì)賽車各零部件進(jìn)行了大量輕量化的探索,其中不乏采用拓?fù)鋬?yōu)化方法進(jìn)行鏈輪的輕量化處理,而拓?fù)鋬?yōu)化的基礎(chǔ)是對(duì)零部件進(jìn)行準(zhǔn)確的應(yīng)力和應(yīng)變分析。對(duì)于有限元軟件,在分析時(shí)鏈輪與鏈節(jié)、鏈節(jié)與鏈節(jié)之間存在著許多的接觸關(guān)系,這些接觸關(guān)系組成了一個(gè)多接觸系統(tǒng),其力學(xué)求解十分復(fù)雜。研究表明,當(dāng)具有多接觸約束的機(jī)械系統(tǒng)在進(jìn)行仿真分析的時(shí)候,往往存在著明顯的計(jì)算效率低下的現(xiàn)象,尤其在分析模型比較龐大的時(shí)候,甚至?xí)?dǎo)致求解失敗[2]。針對(duì)這一問(wèn)題,蒲明輝等人[3]使用Adams 虛擬樣機(jī)技術(shù),將鏈傳動(dòng)動(dòng)力學(xué)分析中鏈節(jié)之間的約束以柔性連接代替剛性連接,縮短了仿真時(shí)間,提高了仿真效率。
本文基于理論推導(dǎo),簡(jiǎn)化了鏈輪鏈條的受力模型,將簡(jiǎn)化后的結(jié)果應(yīng)用于鏈輪的靜力分析中,通過(guò)比較多接觸模型和簡(jiǎn)化后的力分析模型,驗(yàn)證力分析模型的正確性以及計(jì)算效率優(yōu)越性。
2 方程式賽車滾子鏈傳動(dòng)特點(diǎn)
在方程式賽車鏈傳動(dòng)系統(tǒng)中,由于比賽項(xiàng)目的多樣——直線加速、8 字繞環(huán)、高速避障、耐久,鏈輪需要承受直線加速?gòu)椛淦鸩綍r(shí)的沖擊載荷以及高速避障與耐久時(shí)的動(dòng)態(tài)載荷。本文著重把賽車彈射起步時(shí)的沖擊載荷轉(zhuǎn)化為靜載荷進(jìn)行分析。
3 鏈傳動(dòng)的簡(jiǎn)化力分析模型
在鏈輪與鏈節(jié)的滾子達(dá)到平衡過(guò)程中,每個(gè)鏈節(jié)的受力并不是孤立進(jìn)行的。每個(gè)鏈節(jié)存在類似的平衡狀態(tài),只有逐個(gè)達(dá)到平衡后,各鏈節(jié)才能停止上移,達(dá)到嚙合平衡狀態(tài)[4]。
鏈輪平衡時(shí)各嚙合鏈節(jié)的受力平衡簡(jiǎn)圖如圖1 所示。

圖1 各嚙合鏈節(jié)的受力平衡簡(jiǎn)圖
由上述引文對(duì)刮板輸送機(jī)鏈輪和鏈節(jié)的分析可知,滾子鏈鏈輪和刮板輸送機(jī)鏈輪的受力形式基本相同,所以將引文的公式進(jìn)行簡(jiǎn)化后,嚙合力的變化方程為:
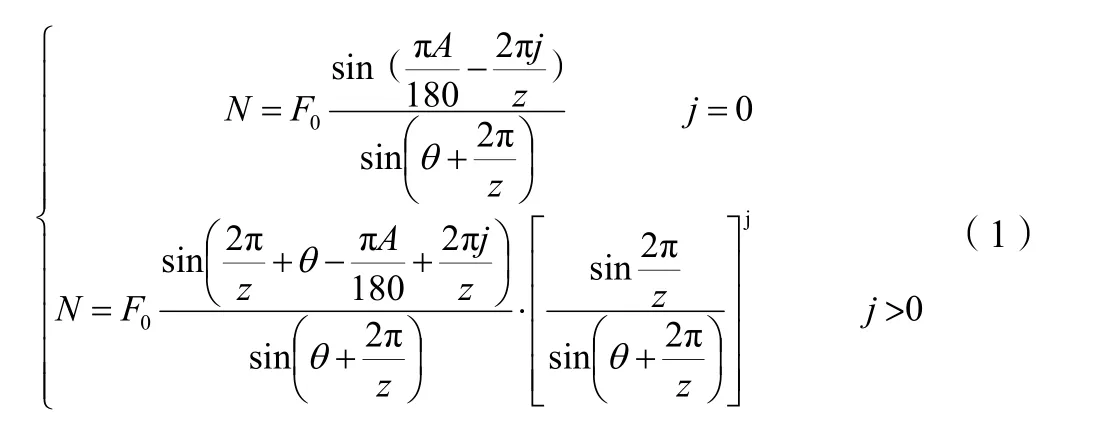
式(1)中:A為鏈輪的旋轉(zhuǎn)角度,°;z為鏈輪齒數(shù);j=floor(Az/360);θ為齒形半角,rad。
4 鏈傳動(dòng)簡(jiǎn)化模型與多接觸模型的對(duì)比分析
近年來(lái),中國(guó)方程式賽車傳動(dòng)系統(tǒng)多采用密度較小、綜合性能較好的7075 鋁合金材料,可以滿足使用要求。仿真采用的是武漢理工大學(xué)燃油方程式賽車隊(duì)2019 賽季使用的鏈輪,該鏈輪為32 齒滾子鏈鏈輪。
表1 為鏈輪基本尺寸參數(shù)。
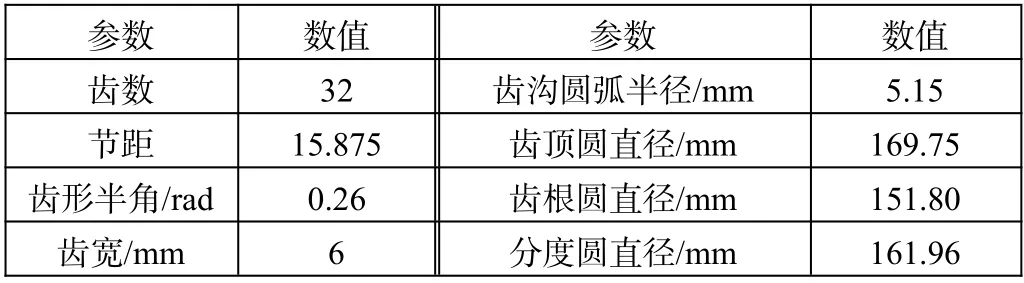
表1 大鏈輪參數(shù)表
4.1 大鏈輪的建模
大鏈輪的三維模型如圖2 所示。

圖2 大鏈輪的三維模型
按照國(guó)家標(biāo)準(zhǔn)GB/T 1243—1997 在三維建模軟件Catia中分別構(gòu)建鏈輪和鏈條的三維立體模型(其中鏈條為采購(gòu)件,按照實(shí)際尺寸建模)。其中,齒形按照標(biāo)準(zhǔn)以及配合鏈條實(shí)際尺寸進(jìn)行建模,而花鍵則參考德雷克斯勒技術(shù)文件上的花鍵尺寸進(jìn)行建模,外形則進(jìn)一步參考鏈輪所在位置具體尺寸,滿足2019 年中國(guó)大學(xué)生方程式汽車大賽規(guī)則中鏈板的寬度至少為鏈條最寬處寬度的3 倍,且鏈條在鏈條中心線向左和向右各1.5 倍鏈條寬度范圍內(nèi),都能被防護(hù)罩防護(hù)。
4.2 受力模型的進(jìn)一步簡(jiǎn)化
對(duì)于32 齒鏈輪,先將每個(gè)齒上的力進(jìn)行簡(jiǎn)化。賽車實(shí)際行駛時(shí),遇到的工況非常復(fù)雜,但可主要分為勻速、彈射起步、緊急制動(dòng)3 個(gè)工況。經(jīng)過(guò)分析,發(fā)現(xiàn)大鏈輪的危險(xiǎn)工況為彈射起步工況,集成變速箱將力矩傳遞給小鏈輪,小鏈輪通過(guò)鏈條將力矩傳遞給大鏈輪,在起步瞬間,可以假設(shè)大鏈輪靜止,承受來(lái)自鏈條的全部拉力[5]。
第一個(gè)齒嚙合力最大時(shí)其他齒嚙合力并非最大,但因其為循環(huán)工況,指定第一個(gè)齒嚙合力最大即可。給定緊邊張力F0=7 214 N 在j=0 時(shí)計(jì)算得第一個(gè)齒嚙合力最大時(shí)鏈輪的轉(zhuǎn)角為A=11.25°,則在這種情況下(齒形半角θ=15°),算得各齒所受嚙合力的大小。N1=0.438 6F0=3 164 N,N2=0.246 2F0=1 776 N,N3=0.108 0F0=779 N,N4=0.047 4F0=342 N。
第一個(gè)齒受力最大時(shí)的轉(zhuǎn)角關(guān)系如表2 所示。

表2 第一個(gè)齒受力最大時(shí)的轉(zhuǎn)角關(guān)系
4.3 鏈輪裝配體的有限元分析模型
鏈輪與鏈條的材料屬性表如表3 所示。
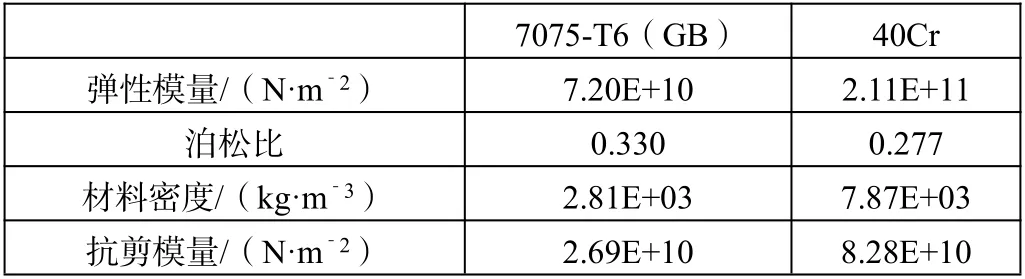
表3 鏈輪與鏈條的材料屬性表
通過(guò)Catia 與ANSYS 的數(shù)據(jù)接口導(dǎo)入ANSYS 軟件進(jìn)行有限元分析。在Engineering Data 中建立材料7075 鋁,并輸入彈性模量7.20×1010Pa、泊松比0.330。利用CAD/CAE 之間接口,將大鏈輪與鏈條裝配的CATProduct 三維數(shù)模導(dǎo)入ANSYS Workbench 軟件中。大鏈輪與鏈條的約束采用ANSYS 自動(dòng)生成。采用網(wǎng)格密度為1.5 mm 的四面體網(wǎng)格。在大鏈輪花鍵的一端施加Fix Support 約束[6]。
由上面的計(jì)算結(jié)果可知,第4 個(gè)齒的嚙合力N4=0.047 4F0=342 N,對(duì)比第1 個(gè)齒N1=0.438 6F0=3 164 N,兩者相差一個(gè)數(shù)量級(jí),所以沒(méi)有必要對(duì)后面的齒的嚙合力進(jìn)行計(jì)算。
對(duì)于力簡(jiǎn)化模型,直接在鏈輪前四個(gè)齒的工作段上添加F1、F2、F3、F4四個(gè)力(后面的輪齒受力較小,分析意義不大)。
而對(duì)于多接觸分析模型,定義鏈輪與鏈節(jié)、鏈節(jié)與鏈節(jié)之間的接觸形式為No Separation,然后在第一個(gè)鏈節(jié)上施加作用力F0=7 214 N。
兩種分析模型的邊界條件如圖3 和圖4 所示。有限元分析結(jié)果如圖5 和圖6 所示。
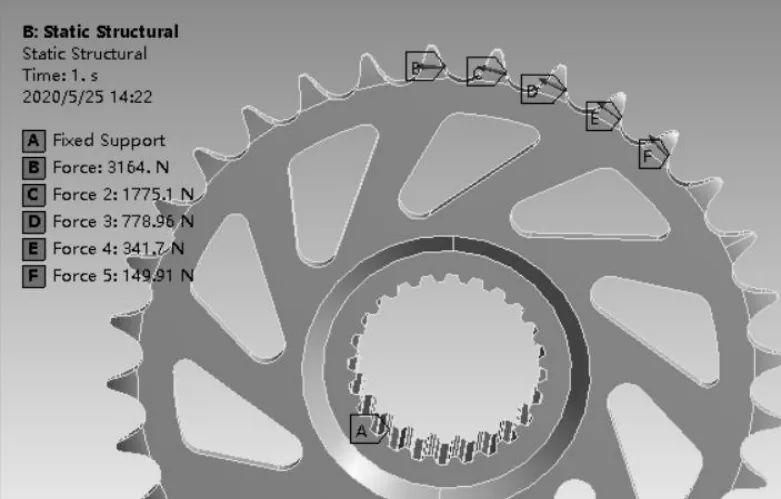
圖3 簡(jiǎn)化力分析模型邊界條件

圖4 多接觸模型邊界條件
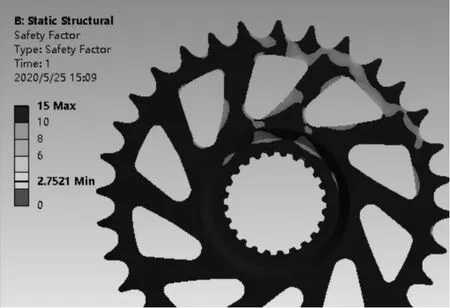
圖5 簡(jiǎn)化力模型安全系數(shù)
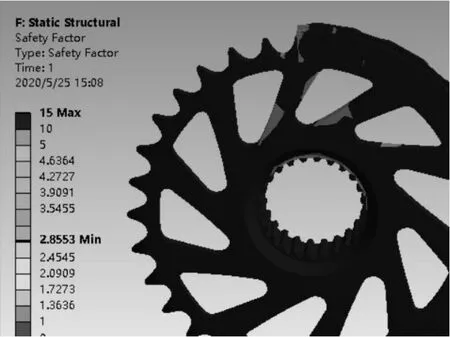
圖6 多接觸模型安全系數(shù)
由上圖可知,簡(jiǎn)化力學(xué)模型分析方法最終得出的安全系數(shù)值與多接觸模型得出的結(jié)果相差3.6%,在誤差可接受范圍內(nèi)。對(duì)于計(jì)算效率,由于多接觸模型的計(jì)算復(fù)雜度太大,計(jì)算結(jié)果未能完全收斂以達(dá)到更加精確的地步,而簡(jiǎn)化力分析模型只有一個(gè)實(shí)體和較少的邊界條件,計(jì)算結(jié)果較快地收斂,更快地得到了計(jì)算結(jié)果。
4.4 實(shí)驗(yàn)分析
將加工后的模型裝配到賽車上,并進(jìn)行多次跑動(dòng)試驗(yàn)。大鏈輪實(shí)物和大鏈輪實(shí)際使用分別如圖7 和圖8 所示。由圖7、圖8 可知,鏈輪裝配到賽車上后,除了有輕微的磨損,沒(méi)有缺齒等嚴(yán)重?fù)p傷。在訓(xùn)練過(guò)程中,未發(fā)現(xiàn)其他異常現(xiàn)象,說(shuō)明其靜力特征滿足要求。
5 結(jié)論
建立了鏈輪的簡(jiǎn)化力分析模型,并結(jié)合有限元分析校核其靜強(qiáng)度。對(duì)比簡(jiǎn)化力分析模型和多接觸鏈輪模型的有限元分析結(jié)果,相互驗(yàn)證合理,結(jié)合實(shí)際證明其滿足使用要求。雖然進(jìn)行了靜強(qiáng)度分析,但由于賽車動(dòng)態(tài)運(yùn)行過(guò)程中的受力情況更為復(fù)雜,加上鏈輪磨損與金屬疲勞的因素,并不能僅根據(jù)靜強(qiáng)度分析保證其長(zhǎng)期可靠性。下一步的工作則是著重分析鏈輪在長(zhǎng)時(shí)間工作下的失效形式。

圖7 大鏈輪實(shí)物

圖8 大鏈輪實(shí)際使用
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
