基于神經網絡PID的解凍裝置溫濕度控制系統設計*
2020-08-11 00:47:10王安敏耿云飛
計算機與數字工程 2020年6期
關鍵詞:系統
王安敏 耿云飛
(青島科技大學機電工程學院 青島 266061)
1 引言
隨著人口數量的增加以及生活節奏的加快,大型肉食食品加工廠的數量在不斷的增加,為保證食品的完整性以及便利,大都是整只進行冷藏,而解凍成了一定問題,傳統的解凍方式出現了解凍速度慢、營養流失等問題[1]。而用磁控管進行微波解凍很好的解決了以上問題,本設計研發一種大容量解凍柜以STM32F407為核心控制整套解凍系統,STM32F407屬于ARM系列單片機相比其他低端單片機能更好的建立人機交互觸摸液晶屏桌面,同時具有144個引腳,1MBFLASH,192KBSRAM,32位定時器,USB,I2C確保系統運行的可靠性以及數據保存和運行的時長性[2~3]。通過BP神經網絡的學習能力實現PID算法參數的最優化組合進而調節箱體溫度,從而提高系統的適應性、魯棒性、穩定性,保證系統裝置的可控性以及效果的可靠性,取得最理想的控制效果,達到理想的解凍效果。
2 系統工作原理設計
該裝置解凍系統主要由噴霧加濕器噴頭1、內箱體支架2、變壓器3、超導熱管4、空間溫度傳感器5、肉體溫度傳感器6、散熱風扇7、磁控管8、濕度傳感器9、重量傳感器10組成。將需要的解凍的大型肉體,放入箱體,由DYLY-102測量采集解凍體重量信息,由磁控管M24FB-210A產生電磁波進貫穿物體迅速加熱,由紅外線傳感器測量解凍體的體表溫度,由WZPT-100鉑電阻溫度測溫器及AM2305數字溫濕度測溫器測量箱體內的溫濕度,由加濕器進行加濕處理,通過神精網絡多元素融合進行PID運算調節溫濕度、設定工作時間,使溫濕度精確控制達到所設定的值,得到良好的解凍效果,其中加濕器由繼電器控制通斷[4~6],系統裝置結構如圖1所示。
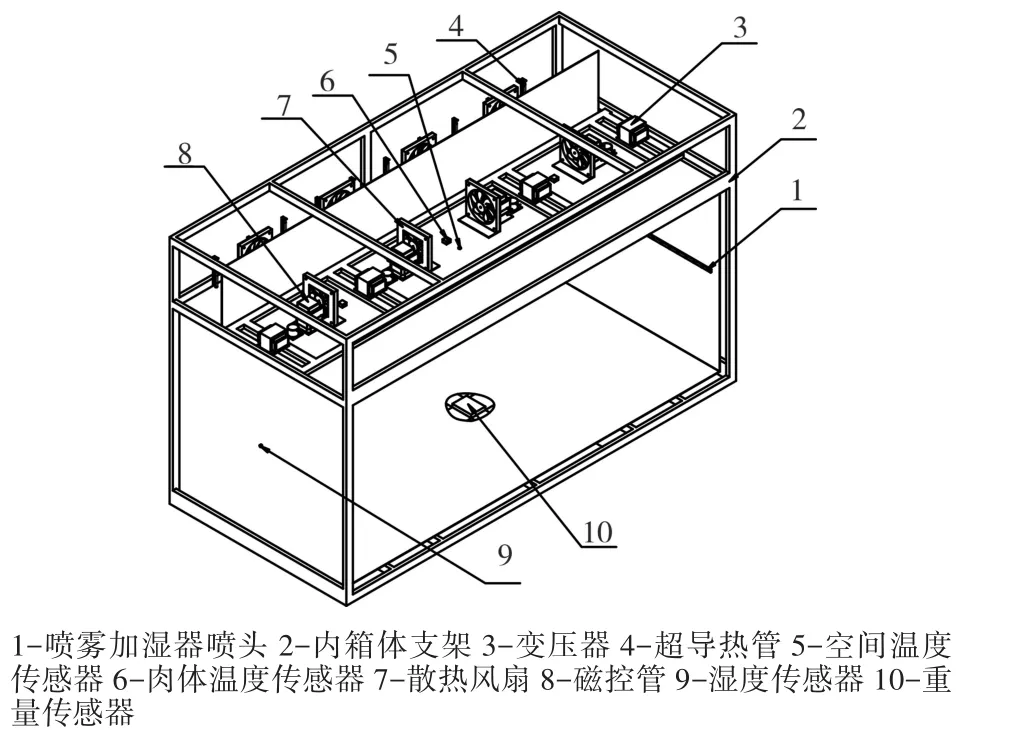
圖1 解凍系統結構圖
3 系統硬件電路
3.1 溫濕度檢測電路
設備采用WZPT-100鉑電阻溫度測溫器測量箱體內,采用TN901紅外線溫度傳感器測量解凍體表面溫度防止溫度過高破壞肉體表面質量,AM2305數字溫濕度測溫器測量箱體濕度同時為控制器計算提供解凍體中心溫度參數[7~10]。WZPT-100溫度檢測器由304不銹鋼管組成測量范圍-200℃~150℃由螺紋密封可以防止微波泄露,并且單線傳遞數據,控制電路如圖2,AM2305數字溫濕度測溫器的連接線路同時也是單線傳遞數據如圖3,TN901紅外線溫度傳感器控制電路控制如圖4。
3.2 稱重系統的電路設計
DYLY-102稱重感應器,將重量測量信息變成電壓信號,通過特定激勵芯片放大并通過A/D數模轉換將電壓信號轉變成數字信號并將信息傳遞到STM32參與數據運算,控制加熱時間及溫濕度的調試計算,同時將測量數據信息保存到數據寄存器內在液晶屏上顯示,其連接線路如圖5。
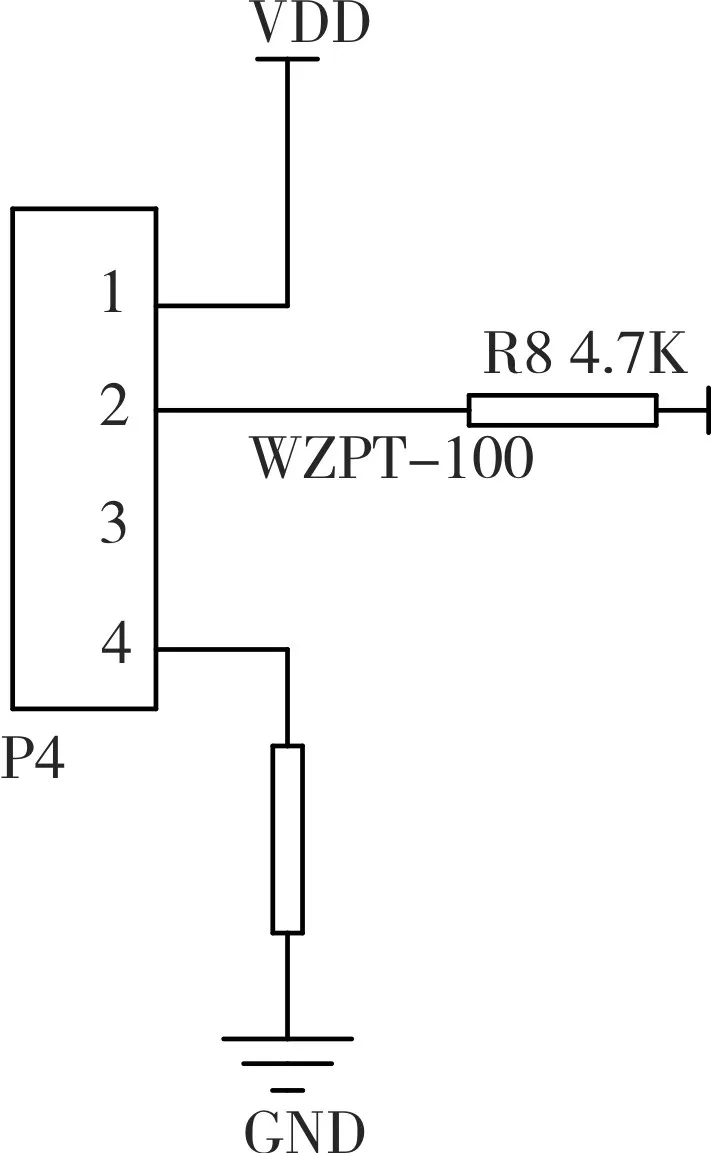
圖2 WZPT-100控制電路

圖3 AM2305控制電路
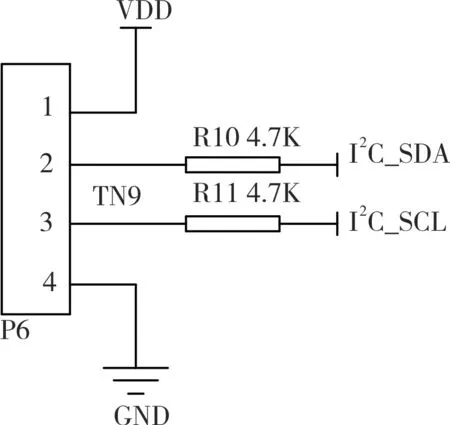
圖4 TN901控制電路
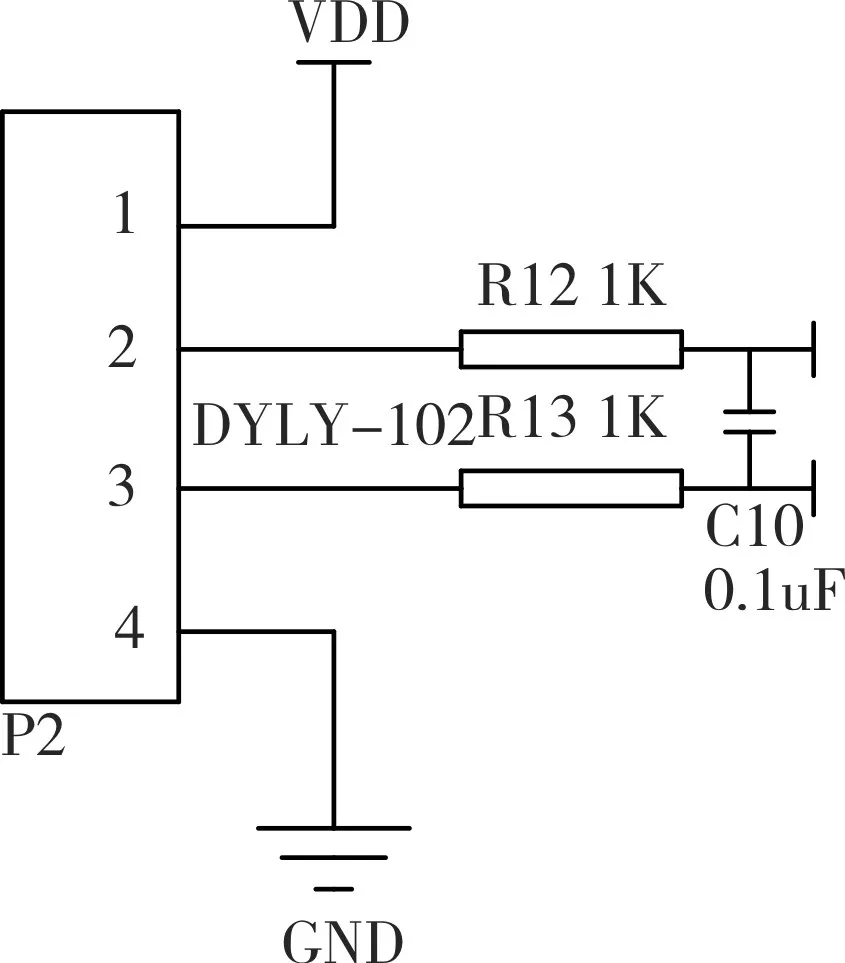
圖5 DYLY-102控制電路
3.3 其他輔助電路設計
1)液晶觸摸屏控制電路
選擇eView ET070智能顯示屏作為人機交互設備,主要用來輸入參數、查看箱體內實時溫度、濕度等參數,該觸摸屏是16位色彩屏,內部有128M FLASH、64MSDRAM儲存器可以用于數據程序的保存,需要24V的供電模塊,與STM32串口連接。
2)報警電路
該設備的快速解凍系統需要蜂鳴器進行報警以及提醒,當解凍完成,艙門沒關,加熱時間過長等系統失誤時會進行提醒,電路圖如圖6。
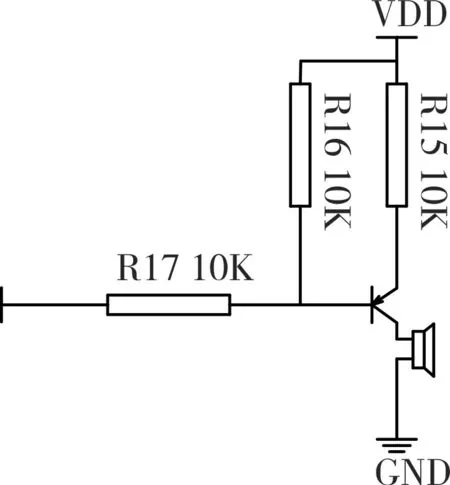
圖6 蜂鳴器控制電路
4 溫濕度系統調節設計
4.1 BP神經網絡PID控制算法
BP神經網路PID算法就是經過神經網絡的權系數調整和學習為PID的線性控制提供數據參數,控制比例(KP)、積分(KI)、微分(KD),使箱體內的溫度可以最大可能的接近理想值,實現微波解凍的最優化,控制結構圖如圖7。增量式PID控制算式:
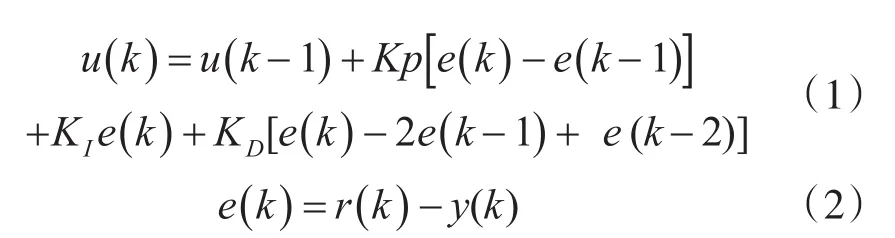
公式中:KP為比例系數,KI為積分系數,KD為微分系數,uk為PID的控制器輸出,y(k)為供熱系統的加權位移量,r(k)為溫度設定量,e(k)為時間k時的位移系統設定量與加權位移量的偏差。
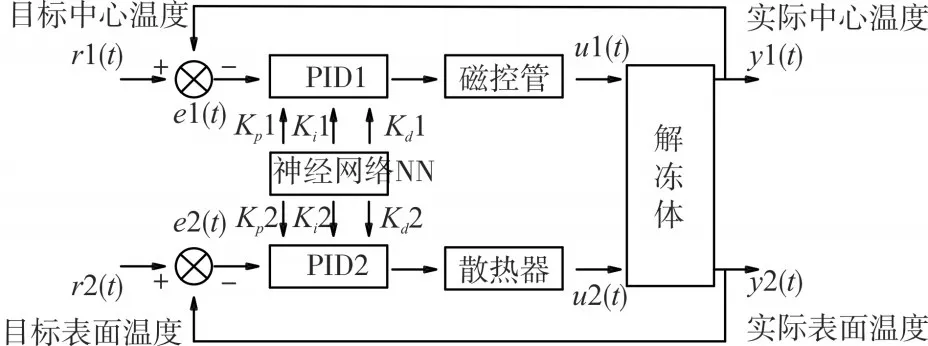
圖7 BP神經網絡PID控制結構

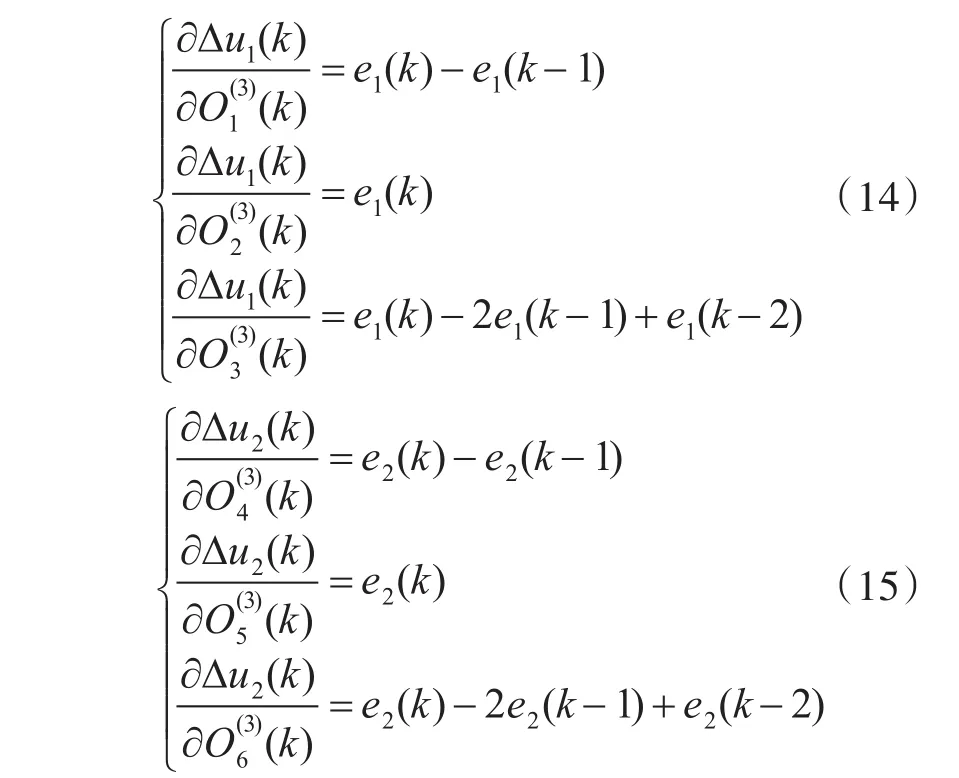
神經網絡的輸出層的輸入、輸出各為

式中rp為變化量的理想設定值,yp為測量值。
正網絡的權值量由最快下降法來修正,就是朝權系數的減小方向進行搜索調整,另外附加一個全局極小的慣性項用來使搜索速度加快收斂,從而得到:
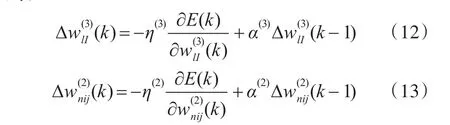
式中η學習速率,α平滑因子。
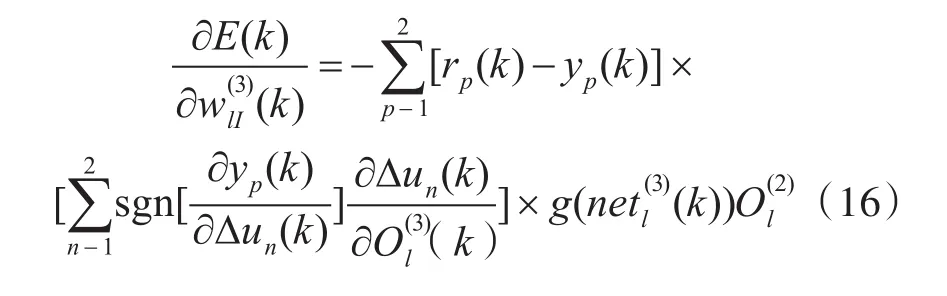
由式(1)~式(6)及增量式PID控制算法計算可得:
綜上所述,可得輸出層的權系數學習計算公式:
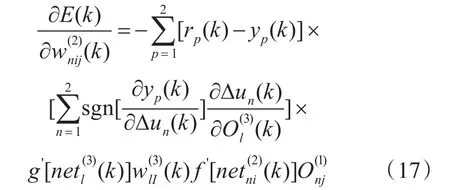
根據以上公式推理,可得到隱含層的權系數學習計算公式:
4.2 溫度控制方法
經過熱負荷計算本裝置采用四個紅外線溫度傳感器,進行多點解凍體表面溫度檢測,由于體積較大所以每個磁控管都由相對應的溫度傳感器參與BP神經網絡PID計算并進行調節,同時參與調節的還有八個散熱器分別裝備的位置不同,以及十根超導熱管參與散熱防止溫度過高使解凍體的內外受熱不均勻,散熱器以及磁控管都可以單獨通過調節PWM進行獨立控制,確保每部分空間的熱量都可以根據解凍體的解凍情況進行均勻溫度控制,同時用WZPT-100鉑電阻溫度測溫器檢測箱體內的空間溫度,提供箱體溫度參數進行檢測箱體溫度避免箱體溫度過高影響解凍體內外溫度差過高,控制磁控管以及散熱器調整PWM調整溫度控制,保證解凍體解凍完成后整體溫度保持在-2℃~0℃以內,便于加工計算解凍時間由稱重器測的信息估算解凍時間范圍并綜合解凍過程中的溫度控制信息經過BP神經網絡PID多元素參與計算確定解凍完成時間,加快解凍時間[11~15],控制流程如圖8。
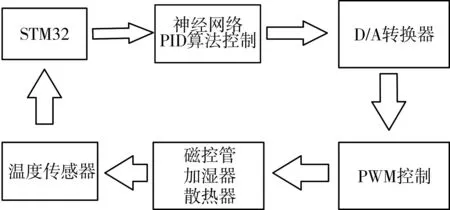
圖8 控制流程
4.3 濕度控制方法
磁控管進行加熱時會對解凍體及箱體內的水分進行蒸發,會使食物在解凍過程中失去大量的水分,會影響食物的口感及賣相甚至會在加工過程中影響加工參數,經過大量的實驗發現當箱體的維持在96%RH時對食物的口感以及加工的溫度控制都能起到很好的作用,裝置設計使用加濕器在解凍體解凍過程中進行箱體加濕,箱體的加濕時間由紅外線溫度傳感器,濕度傳感器經過BP神經網絡PID計算調試確定加濕器運行時間。加濕器采用25S為一周期的周期性檢測并多元素綜合經過BP神經網絡PID計算設定時間,當加濕時間少于15s時加濕器不進行工作,避免加濕器啟動過于頻繁影響機器的使用壽命,大于15s時加濕器開始啟動加濕,用來維持恒定的96%濕度箱體環境。
4.4 系統程序設計
解凍的解凍是以磁控管,散熱器以及加濕器作為整套設備解凍的核心,通過BP神經網絡PID進行計算確定調節參數然后通過PWM的占空比來調節和控制各個部件,進而實現各個部件的功率輸出的調節,來達到利用磁控管解凍的目的[16~18],流程圖如圖9。
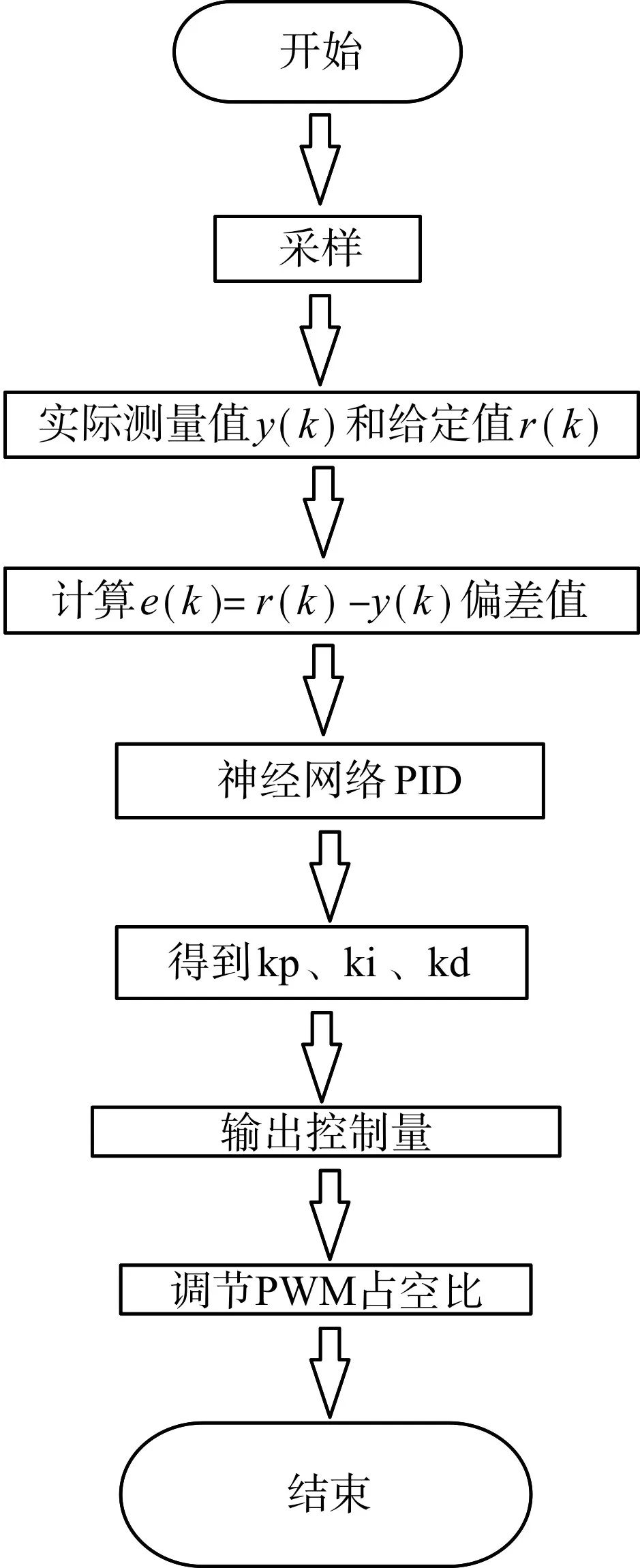
圖9 系統程序圖
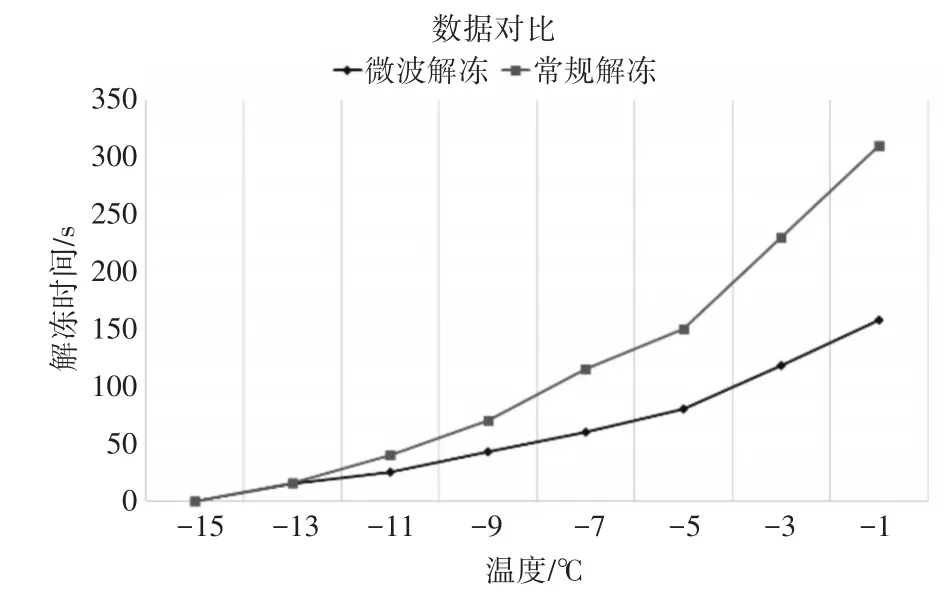
圖10 微波解凍時間折線圖
5 數據分析比較
選用質量基本相同的冷凍24h的兩頭豬,達到相同的溫度,在普通解凍方式和微波解凍方式下進行解凍,根據解凍數據繪制折線圖如10圖所示,對比發現微波解凍方式下比常規方式解凍的速度快,說明了通過BP神經網絡PID計算控制后可以有效地控制裝置,有效地控制解凍體快速的解凍。
6 結語
設計在傳統的解凍方式基礎上加上STM32為核心控制系統的以及BP神經網絡PID為算法的新型大容量微波解凍裝置,利用磁控管產生的微波進行解凍使解凍體解凍均勻,節約時間,衛生等優點以及BP神經網絡PID算法的靈敏性、超調量小、抗干擾等優點,采集計算數據參數通過STM32豐富的接口以及簡化電路控制整個系統,保證精確達到解凍效果,優化解凍效果,在工業生產上具有廣泛的前景和實用性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32