輥磨翻輥機構運動仿真分析
2020-08-07 08:17:44郭磊孫文東
水泥技術 2020年4期
郭磊,孫文東
傳統平面四桿機構及其變異結構可實現多種運動規律及運動軌跡,且結構簡單,穩定可靠,易于加工制造,被廣泛應用于各個領域。對四桿機構的分析通常采用作圖法和解析法,作圖法分析計算的精度受作圖精度的影響,而解析法雖然分析計算精度高但計算工作量較大。近年來,隨著計算機技術的飛速發展,通過計算機仿真可得到任意構件的運動軌跡與運動參數,借助計算機進行機構分析變得簡單易行且形象直觀。
Solid Works軟件是目前應用最多的一款三維機械設計軟件,作為一個虛擬樣機的仿真分析工具,其Motion運動仿真插件可實現各種復雜機構的運動學和動力學仿真分析,得到機構的位移、速度、加速度、作用力等,并可通過數據、圖表、動畫等形式表現出來,反映機構的運動特性,為機構的優化設計提供依據和參考。我公司基于Solid Works Motion仿真插件對輥磨翻輥機構進行了運動仿真分析,具體情況如下:
1 輥磨翻輥機構及運動軌跡描述
我公司TRM型輥磨的粉磨施力單元由支架、搖臂、磨輥、加壓油缸組成,每個單元彼此獨立。為了便于檢修維護,可將單獨的磨輥翻出磨外,該翻出機構稱為翻輥機構,如圖1所示。該機構可簡化為一種平面四桿機構,如圖2所示,圖中AB段、BC段分別為翻輥底座、磨機基礎與磨機支架組合而成的固定桿,CD段為上搖臂與磨輥組成的繞C點轉動的搖桿。CD′段為上搖臂和磨輥的正常工作位置,CD段為其翻出磨外時的檢修位置,兩個位置間的理論夾角為105°;AD段為翻輥油缸繞A點轉動的搖桿,同時缸桿和缸筒組成直線運動副。機構的翻輥動作過程為,翻輥油缸施加拉(推)力給搖臂、磨輥組成的搖桿,使搖桿由CD′位置轉到CD位置,該過程要求連續平穩、無沖擊。
2 利用Solid Works軟件進行三維建模及運動仿真
2.1 機構三維建模
根據某規格TRM輥磨的磨機二維圖紙,利用Solid Works軟件建立翻輥機構所需三維零部件模型進行裝配。建模時對于不影響仿真分析結果的模型做相應簡化處理,如可完全省略磨機基礎,簡化翻輥底座模型,磨機支架在保證定位安裝尺寸準確的前提下,可只體現外觀結構,省略內部結構。然而需要注意的是,根據現場實際情況,對于上搖臂(連同密封架)與磨輥來說,其重量與重心位置對仿真結果有直接影響,建模時需盡量具體到每個結構細節,以保證仿真結果的準確性。根據以上分析,建立運動仿真用翻輥機構三維裝配體模型,如圖3所示。
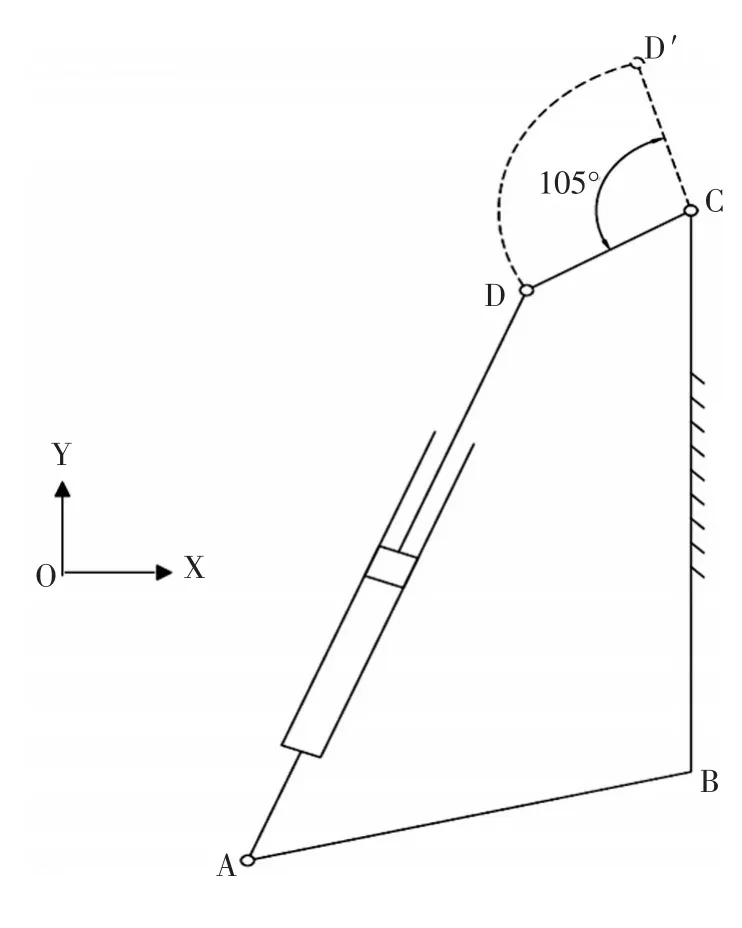
圖2 平面四桿機構

圖3 翻輥機構三維裝配體模型
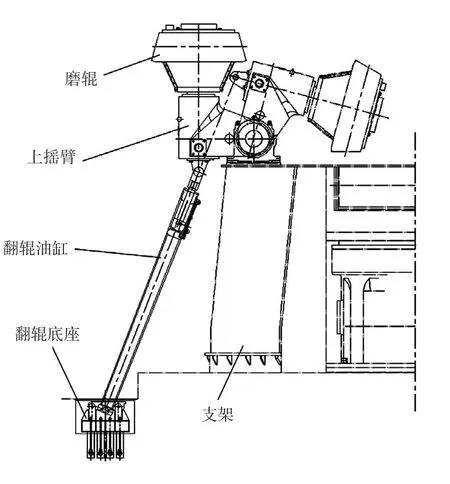
圖1 輥磨翻輥機構
2.2 運動仿真
首先,根據翻輥動作的特點,已知從動件CD搖桿的始末位置及位移,采用逆向求解法,在Motion分析中,新建一個運動算例,設定好搖桿的初始位置,給上搖臂軸孔施加旋轉馬達,輸入位移和模擬時間。雖然并不能準確得知翻輥運動過程中上搖臂角位移規律的數學表達式,但已知其運動緩慢、平穩、連續且無沖擊,整個運動時間大概為15~20s,始末位置速度為0。Solid Works軟件自帶的立方樣條曲線平滑、連續,三階可導,完全滿足翻輥運動的要求,故可采用立方樣條曲線規律作為上搖臂角位移規律,進行模擬仿真,如圖4所示。
翻輥油缸活塞桿的絕對線性位移曲線如圖5所示,將位移曲線輸出,得到表格數據,對數據進行分析并做整理,計算得到缸桿的相對位移值,作為第二次仿真的驅動輸入。
新建第二個運動算例,設置CD搖桿的初始位置(與第一次相同),在活塞桿上添加線性馬達,采用位移控制,輸入第一次仿真中得到的相對位移數據,進行仿真計算,輸出仿真結果,得到油缸力和活塞桿速度隨時間變化的曲線(見圖6、圖7),以及上搖臂(CD搖桿)、缸筒的俯仰角變化規律(見圖8、圖9)。
其中,上搖臂的俯仰角定義為CD桿與初始位置CD′所夾銳角,缸筒的俯仰角定義為AD桿與x軸方向所夾的銳角。
而常規的翻輥油缸拉(推)力是根據靜力學力矩平衡原理,在上搖臂與磨輥的重力對搖臂軸中心的力矩和油缸力對搖臂軸中心的力矩相等的基礎上,計算得到的力。當上搖臂與磨輥的重力力臂最大時,油缸力距最大。通過二維作圖法,可知翻輥起始位置處的油缸力最大,此時的油缸力計算值為541 891N,與運動仿真得出的“油缸力最大為536 257N”結果相比(見圖6),誤差僅為1%,完全滿足計算要求,證明了該運動仿真的正確性。
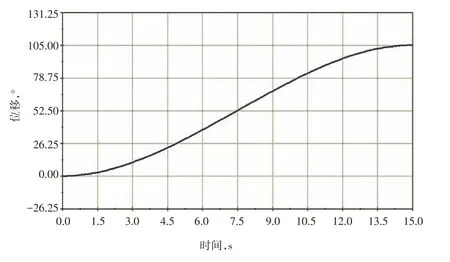
圖4 上搖臂角位移曲線
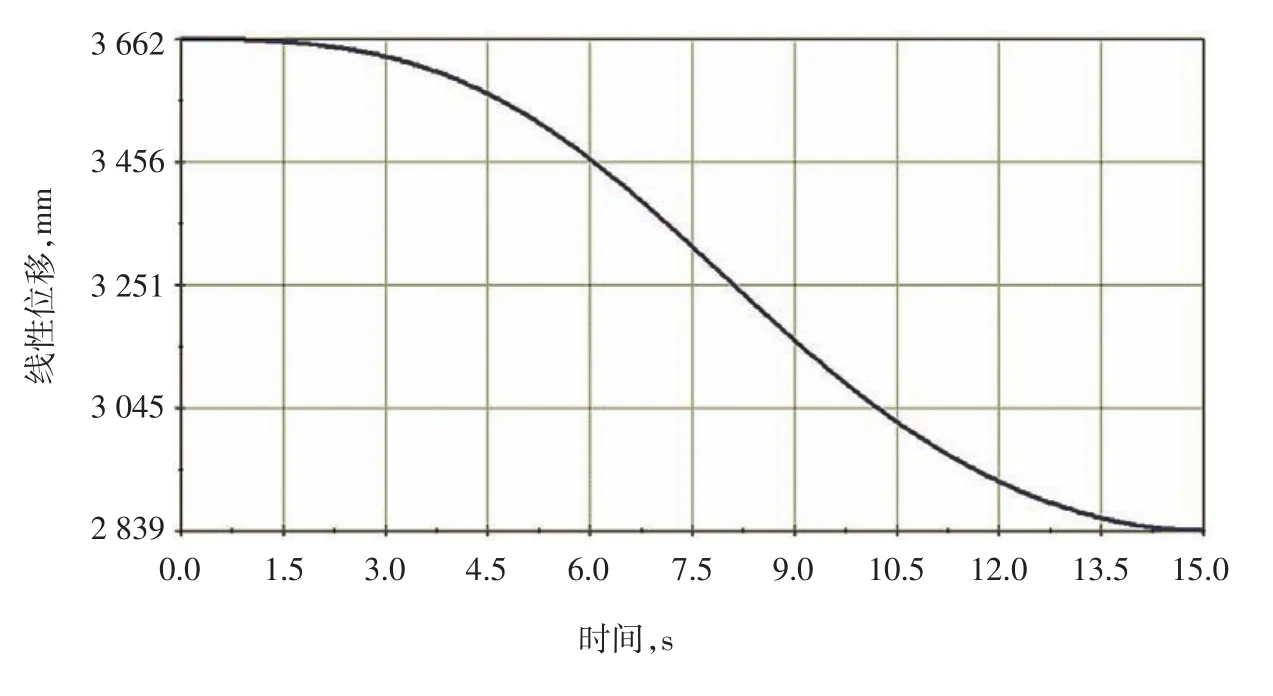
圖5 活塞桿絕對線性位移曲線
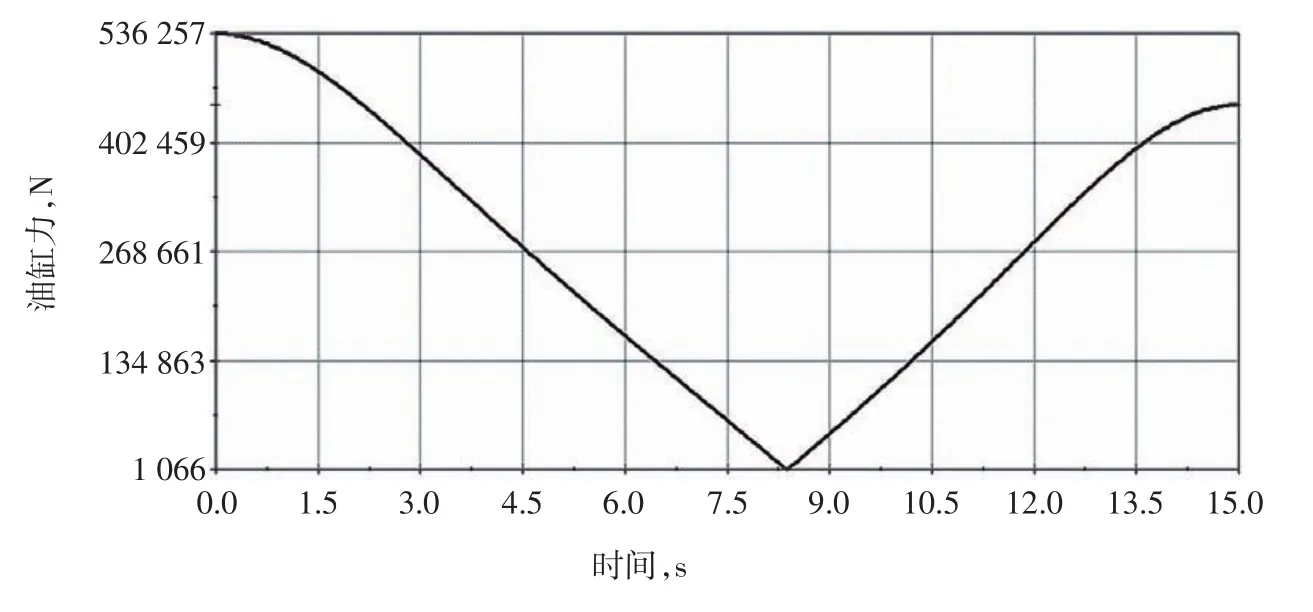
圖6 油缸力曲線
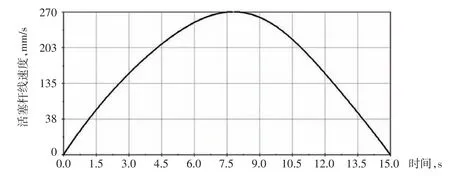
圖7 活塞桿線速度曲線
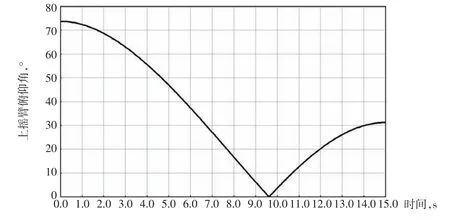
圖8 上搖臂俯仰角變化規律曲線
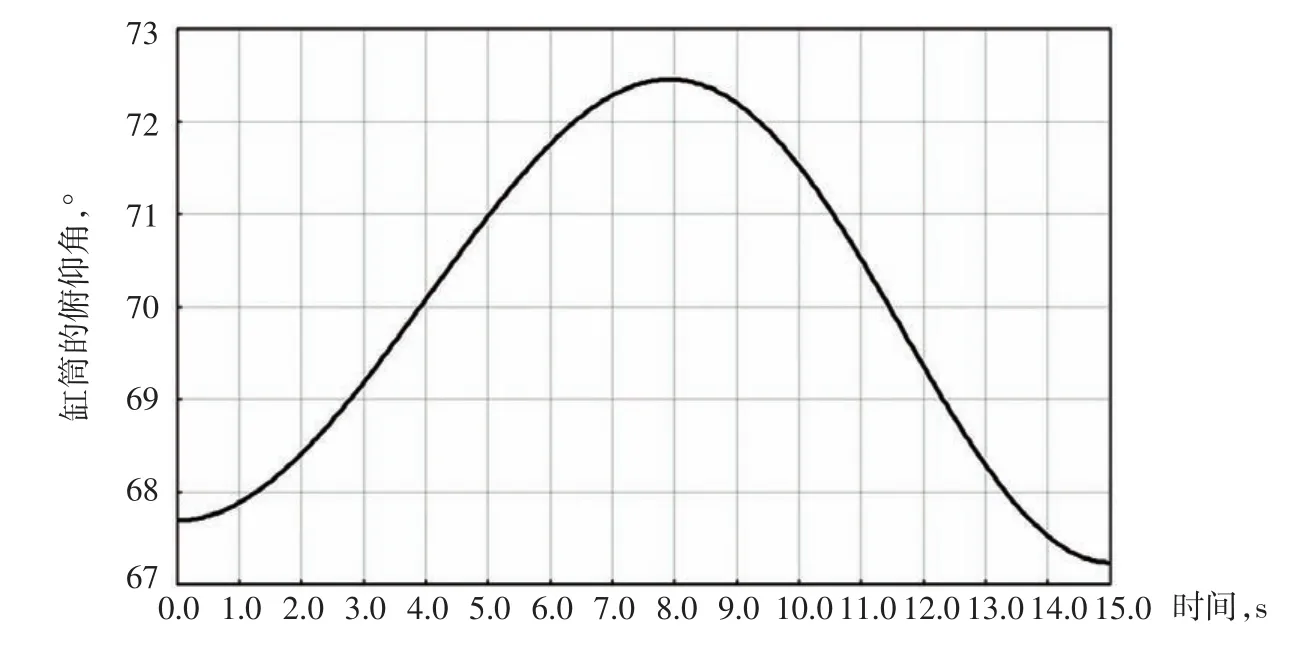
圖9 缸筒俯仰角變化規律曲線
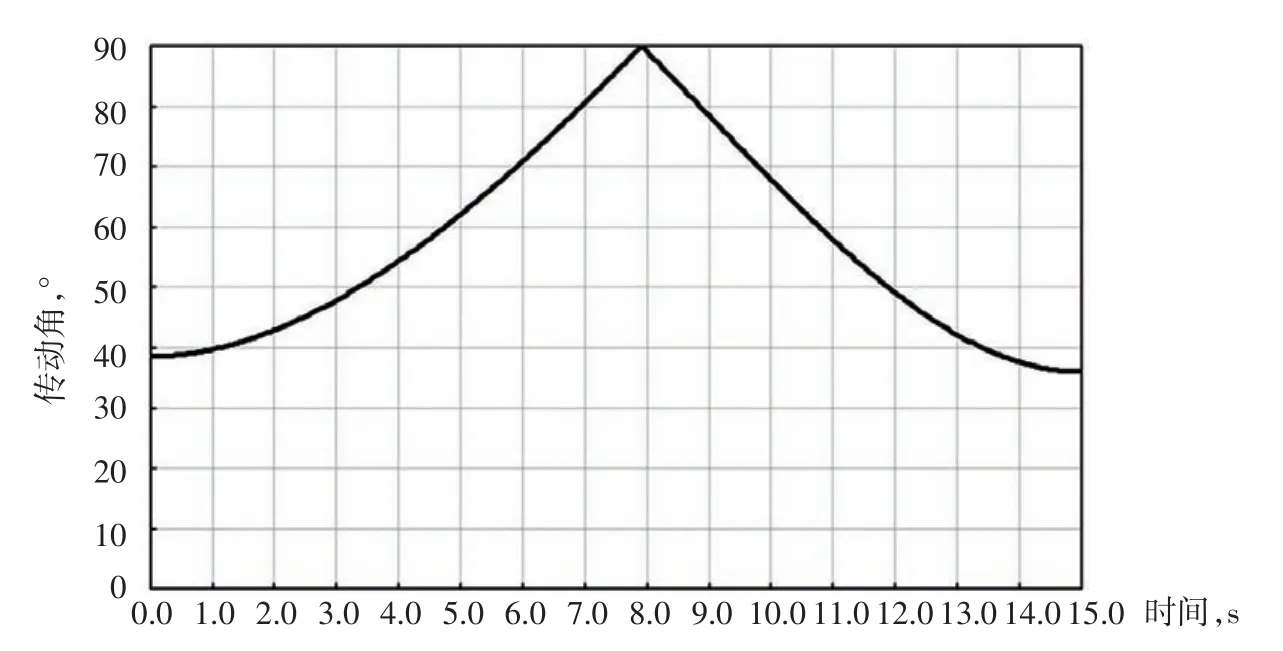
圖10 傳動角變化規律曲線
對于四桿機構而言,傳動角是衡量機構傳力性能優劣的一個關鍵參數,傳動角越小,傳力性能越差,當傳動角為0°時,機構處于死點位置。因此,較好的機構設計,務必保證最小傳動角不能小于某個值,該值越大越好,且機構的傳動角在一個較小范圍內波動。而對于本文所研究的翻輥機構來說,其傳動角應為AD桿與CD桿所夾銳角,如圖2所示。根據運動仿真得到的數據(見圖8、圖9),可間接得到翻輥過程中機構的傳動角隨時間變化的規律(見圖10)。根據圖10中傳動角的變化規律,可以看出傳動角最小約36°,且變化范圍相對較小(36°~90°),機構傳力性能較優。
3 結語
通過對輥磨翻輥機構進行運動仿真分析,得到該機構的運動規律,為該機構的優化設計提供了理論基礎。借助于Solid Works軟件的Motion仿真插件功能,使得機構運動每一時刻的運動學參數求解過程變得簡便,大大提高了設計效率和準確率。