基于神經(jīng)網(wǎng)絡(luò)和證據(jù)理論的火箭發(fā)動(dòng)機(jī)故障診斷
2020-08-04 07:12:48孫成志閆曉東
宇航總體技術(shù) 2020年4期
孫成志,閆曉東,2
(1. 西北工業(yè)大學(xué)航天學(xué)院, 西安 710072; 2. 陜西省空天飛行器設(shè)計(jì)技術(shù)重點(diǎn)實(shí)驗(yàn)室, 西安 710072)
0 引言
隨著航天科技的發(fā)展,高可靠性逐漸成為航天發(fā)射任務(wù)的追求目標(biāo)。在全箭眾多的故障模式中,動(dòng)力系統(tǒng)故障是運(yùn)載火箭最常發(fā)生、造成后果最嚴(yán)重的故障,輕則使運(yùn)載火箭入軌精度降低,重則直接導(dǎo)致飛行任務(wù)失敗[1-2]。因此,研究運(yùn)載火箭發(fā)動(dòng)機(jī)故障診斷具有非常重要的工程價(jià)值和實(shí)際意義。
運(yùn)載火箭動(dòng)力系統(tǒng)模式復(fù)雜,建立系統(tǒng)的解析模型十分困難,故障診斷正確率不高[3]。目前,針對(duì)運(yùn)載火箭動(dòng)力系統(tǒng)故障診斷方法層出不窮,基于信號(hào)檢測(cè)的故障診斷方法[4]、模糊理論的故障診斷方法、專家系統(tǒng)的故障診斷方法以及一些常規(guī)的故障診斷方法存在很大的局限性和適用性較差的問(wèn)題[5]。然而,基于神經(jīng)網(wǎng)絡(luò)的故障診斷方法,處理數(shù)據(jù)能力較強(qiáng),適合處理數(shù)據(jù)量豐富的運(yùn)載火箭發(fā)動(dòng)機(jī)數(shù)據(jù)[6],同時(shí),神經(jīng)網(wǎng)絡(luò)良好的非線性特性也適合對(duì)故障模式繁多、故障原因復(fù)雜的非線性運(yùn)載火箭動(dòng)力系統(tǒng)進(jìn)行故障診斷[7]。但是神經(jīng)網(wǎng)絡(luò)容易陷入局部極小值,有時(shí)只能得到局部最優(yōu)解,可能會(huì)出現(xiàn)誤診的情況。在進(jìn)行故障診斷時(shí),不同故障特征相互混雜在一起會(huì)出現(xiàn)多耦合、模糊性等復(fù)雜特征[8],因此不能利用單一的方法判斷故障模式。證據(jù)理論在無(wú)需先驗(yàn)知識(shí)的情況下,能夠根據(jù)自身的算法融合不同方法的結(jié)果并以推理的形式獲得確定的結(jié)果[9],已經(jīng)成為故障診斷領(lǐng)域的熱點(diǎn)方向。
禹建麗等[10]通過(guò)構(gòu)建BP神經(jīng)網(wǎng)絡(luò)、RBF神經(jīng)網(wǎng)絡(luò)和GRNN(廣義回歸神經(jīng)網(wǎng)絡(luò))故障診斷模型對(duì)變壓器進(jìn)行故障診斷。張煒等[11]通過(guò)建立復(fù)雜設(shè)備故障診斷的多重神經(jīng)網(wǎng)絡(luò)模型結(jié)構(gòu),將其應(yīng)用于液體火箭發(fā)動(dòng)機(jī)渦輪泵的故障診斷。劉兵等[12]提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)的故障診斷方法,較好地解決了固體火箭發(fā)動(dòng)機(jī)地面試驗(yàn)系統(tǒng)的不確定故障診斷問(wèn)題。郝大鵬等[13]運(yùn)用PNN(概率神經(jīng)網(wǎng)絡(luò))建立故障診斷模型,對(duì)汽車尾氣進(jìn)行分析并診斷發(fā)動(dòng)機(jī)故障。盧俊文等[14]通過(guò)改進(jìn)L-M算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)算法,對(duì)航空發(fā)動(dòng)機(jī)氣路故障進(jìn)行診斷。汪廣洪等[9]運(yùn)用BP網(wǎng)絡(luò)良好的非線性映射能力和D-S證據(jù)理論基本概率分配計(jì)算的客觀化能力,提出基于BP神經(jīng)網(wǎng)絡(luò)和D-S證據(jù)理論信息融合的航天器故障診斷方法,但并未給出仿真算例驗(yàn)證。張雷[15]提出一種基于重組粒子群算法的神經(jīng)網(wǎng)絡(luò)故障診斷方法,對(duì)滾動(dòng)軸承故障進(jìn)行診斷。劉小明[16]針對(duì)運(yùn)載火箭的復(fù)雜特性以及傳統(tǒng)BP算法的收斂速度慢、極易陷入局部極小的缺點(diǎn)和實(shí)際的故障樣本少的特性,提出了一種基于故障樹(shù)和SVM算法神經(jīng)網(wǎng)絡(luò)的故障智能診斷方法。李化南[6]在BP網(wǎng)絡(luò)結(jié)構(gòu)的基礎(chǔ)上,提出了一種基于BP網(wǎng)絡(luò)的3層診斷模型,對(duì)液體火箭發(fā)動(dòng)機(jī)的故障模式進(jìn)行診斷。
雖然國(guó)內(nèi)外許多學(xué)者在故障診斷方面做了很多研究,但是在神經(jīng)網(wǎng)絡(luò)的應(yīng)用層面上,大多數(shù)都是使用單個(gè)網(wǎng)絡(luò)進(jìn)行診斷,之后將各個(gè)網(wǎng)絡(luò)的診斷結(jié)果進(jìn)行對(duì)比,這樣很容易出現(xiàn)誤診的情況;也有學(xué)者將多個(gè)網(wǎng)絡(luò)融合,但是診斷網(wǎng)絡(luò)較為簡(jiǎn)單,只適用于已經(jīng)存在的故障模式,對(duì)于未參與網(wǎng)絡(luò)學(xué)習(xí)的故障模式無(wú)法診斷,并且無(wú)法估計(jì)故障模式下具體的特征參數(shù)。因此本文提出了基于神經(jīng)網(wǎng)絡(luò)和證據(jù)理論的方法對(duì)運(yùn)載火箭發(fā)動(dòng)機(jī)故障模式進(jìn)行診斷,并通過(guò)滾動(dòng)時(shí)域估計(jì)方法對(duì)運(yùn)載火箭飛行狀態(tài)特征量進(jìn)行估計(jì),對(duì)于未參與網(wǎng)絡(luò)學(xué)習(xí)的故障模式也能達(dá)到很好的診斷效果。首先采集運(yùn)載火箭的視加速度和角速度信息;之后通過(guò)歸一化神經(jīng)網(wǎng)絡(luò)輸入數(shù)據(jù),將不同故障模式標(biāo)簽化并對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,建立用于運(yùn)載火箭發(fā)動(dòng)機(jī)故障診斷的神經(jīng)網(wǎng)絡(luò)模型;接著通過(guò)D-S證據(jù)理論融合BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)的診斷結(jié)果,判斷最終的故障模式;最后在確定故障模式的情況下利用滾動(dòng)時(shí)域估計(jì)方法,估計(jì)運(yùn)載火箭發(fā)動(dòng)機(jī)故障下的飛行狀態(tài)特征量。
1 BP神經(jīng)網(wǎng)絡(luò)
BP神經(jīng)網(wǎng)絡(luò)是一種按照誤差反向傳播算法訓(xùn)練的多層前饋網(wǎng)絡(luò)。主要由輸入層、隱含層和輸出層組成[17],其結(jié)構(gòu)如圖 1所示。
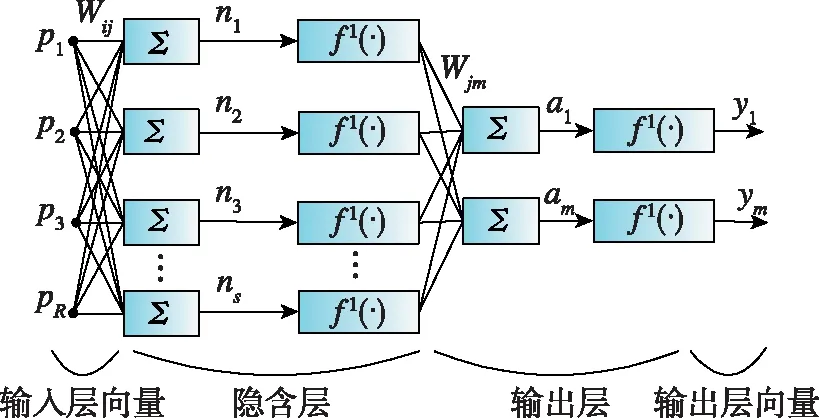
圖1 BP神經(jīng)網(wǎng)絡(luò)模型結(jié)構(gòu)Fig.1 Model structure of BP neural network
BP神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)包括信號(hào)的前向傳播和誤差的反向傳播兩個(gè)過(guò)程[18]。
BP網(wǎng)絡(luò)三層節(jié)點(diǎn)表示為:輸入節(jié)點(diǎn)xj,隱節(jié)點(diǎn)yi,輸出節(jié)點(diǎn)Ol。輸入節(jié)點(diǎn)與隱節(jié)點(diǎn)間的網(wǎng)絡(luò)權(quán)值為ωij,閾值為θi;隱節(jié)點(diǎn)與輸出節(jié)點(diǎn)間的網(wǎng)絡(luò)權(quán)值為Tli,閾值為θl;輸出節(jié)點(diǎn)的期望輸出為tl。
BP算法的步驟如下[19]:
1)設(shè)置各個(gè)權(quán)值和閾值的初始值;
2)利用式(1),(2)計(jì)算隱含層和輸出層的輸出
yi=f(∑ωijxj-θi)
(1)
Ol=f(∑Tliyi-θl)
(2)
3)計(jì)算輸出節(jié)點(diǎn)與期望輸出之間的誤差
(3)
4)按照公式更新各權(quán)值和閾值
Tli(k+1)=Tli(k)+η(tl-Ol)Ol(1-Ol)yi
(4)
(5)
θl(k+1)=θl(k)+η(tl-Ol)Ol(1-Ol)
(6)
(7)
其中,η為學(xué)習(xí)效率。
5)重新計(jì)算各層的輸出值,當(dāng)誤差小于目標(biāo)誤差時(shí)訓(xùn)練完成,否則重復(fù)上述步驟更新權(quán)值、閾值,直至達(dá)到制定精度或者達(dá)到指定訓(xùn)練次數(shù)。
BP神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)流程如圖 2所示。
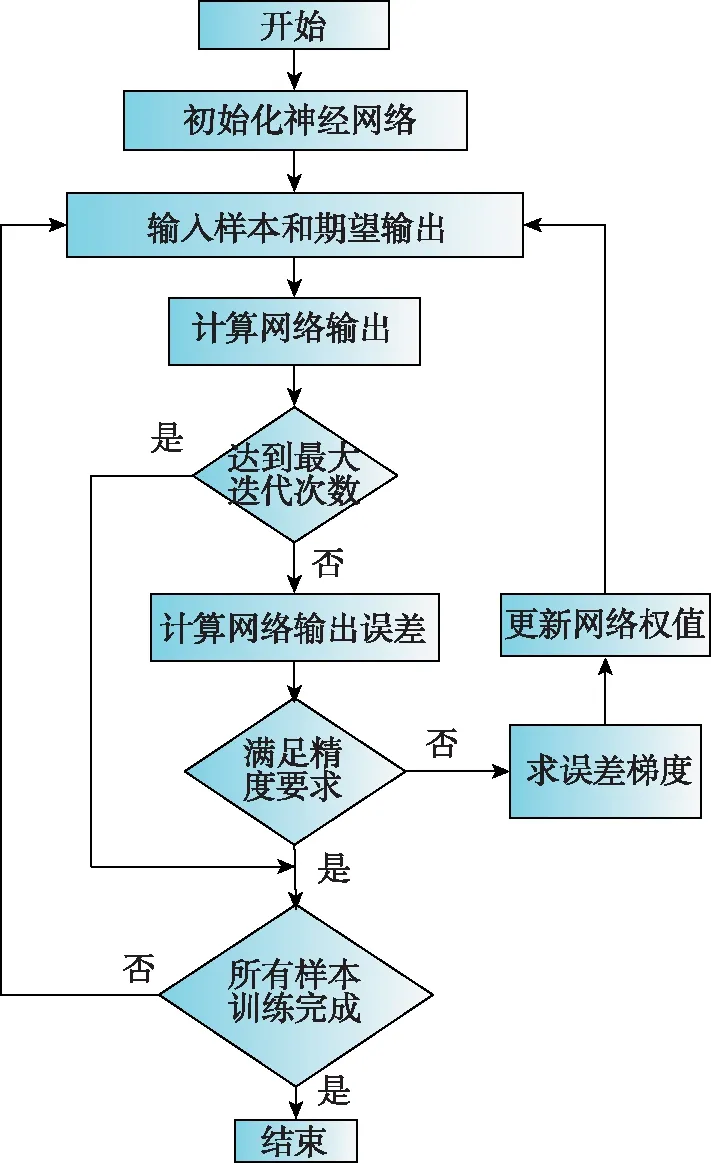
圖2 BP神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)流程Fig.2 Learning process of BP neural network
2 RBF神經(jīng)網(wǎng)絡(luò)
如圖 3所示,RBF由單隱層的三層前饋網(wǎng)絡(luò)構(gòu)成,其中隱藏層中神經(jīng)元的變換函數(shù)。
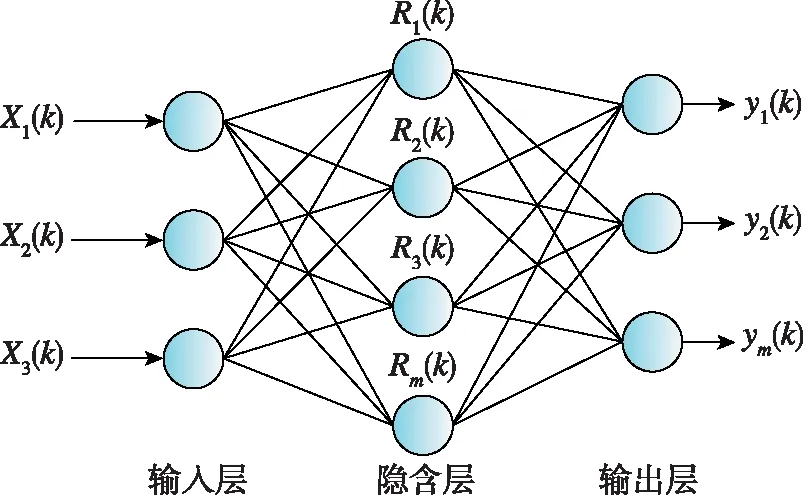
圖3 RBF神經(jīng)網(wǎng)絡(luò)模型結(jié)構(gòu)Fig.3 Model structure of RBF neural network
RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)過(guò)程中,首先采用無(wú)監(jiān)督學(xué)習(xí)確定隱含層中心、擴(kuò)展常數(shù),最后通過(guò)梯度下降法訓(xùn)練權(quán)值[20]。
假設(shè)t為迭代次數(shù),則第t次迭代時(shí)聚類中心μ1(t),μ2(t),…,μk(t),相對(duì)應(yīng)的聚類域?yàn)閃1(t),W2(t),…,Wk(t)。采用K-means聚類算法確定 RBF 神經(jīng)網(wǎng)絡(luò)隱含層的中心和擴(kuò)展常數(shù)的步驟如下[21]:
1)根據(jù)算法應(yīng)用環(huán)境初始化K個(gè)聚類中心,每個(gè)聚類中心的維度和輸入數(shù)據(jù)的維度保持一致;
2)通過(guò)式(8)計(jì)算訓(xùn)練樣本與聚類中心的距離dk,j
(8)
其中,k=1,2,…,K;j=1,2,…,N,N為樣本長(zhǎng)度。

4)通過(guò)式(9)計(jì)算新的聚類中心
(9)
其中,k=1,2,…,K;Nk為第k類中的樣本個(gè)數(shù)。
5)如果μk(t+1)≠μk(t),轉(zhuǎn)到第2)步,否則聚類結(jié)束,轉(zhuǎn)第6)步執(zhí)行;
6)根據(jù)式(10)計(jì)算RBF神經(jīng)網(wǎng)絡(luò)隱含層神經(jīng)元的擴(kuò)展常數(shù)
σ=κdk
(10)
其中,κ為重疊系數(shù),dk為第k個(gè)數(shù)據(jù)中心與其余K-1個(gè)數(shù)據(jù)中心距離的最小值,即
(11)
通過(guò)K-means聚類算法確定隱含層神經(jīng)元中心和擴(kuò)展常數(shù)得到網(wǎng)絡(luò)輸出權(quán)值后,通過(guò)梯度下降法訓(xùn)練網(wǎng)絡(luò)權(quán)值。基于梯度下降的權(quán)值訓(xùn)練算法[21]為:
RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)的目標(biāo)函數(shù)為
(12)
其中,κj為遺忘因子,誤差信號(hào)ej定義為
(13)
考慮所有訓(xùn)練樣本和遺忘因子的影響,μk,σk和ωk的調(diào)節(jié)量為
(14)
(15)
(16)
其中,φi(Xi)為第k個(gè)隱節(jié)點(diǎn)對(duì)Xj的輸出,η為學(xué)習(xí)率。
3 D-S證據(jù)理論
D-S證據(jù)理論建立在一個(gè)非空集合Θ上,Θ稱為辨識(shí)框架,在航天器故障診斷中,Θ為一個(gè)故障模式對(duì)應(yīng)的基本故障組成的集合[22]。
定義基本概率分配函數(shù)BPAF(Basic Probability Assignment Function)
m:2Θ→[0,1]
其中,m滿足
m(Φ)=0
(17)
(18)
(A,m(A))稱為證據(jù)體,利用證據(jù)體定義信度函數(shù)和似然函數(shù)

(19)

(20)
Bel和Pl表示信度函數(shù)上的上下限值,稱為信度區(qū)間[23],如圖 4所示。
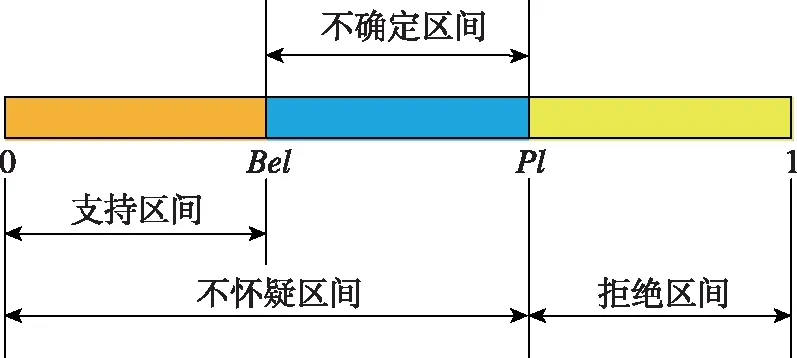
圖4 命題不確定度Fig.4 Uncertainty of proposition
D-S合成規(guī)則是在相同的識(shí)別框架下,給定不同證據(jù)的信度函數(shù),運(yùn)用合成法則計(jì)算各個(gè)證據(jù)融合之后的信度函數(shù)。
設(shè)Bel1和Bel2分別為同一識(shí)別框架上的兩個(gè)基本概率賦值分配,基本元素分別為A1,A2,…,AK和B1,B2,…,BK,則組合后的基本概率賦值為
(21)
其中,K為沖突因子。
(22)
該合成規(guī)則通過(guò)融合多個(gè)證據(jù)體,可以降低各個(gè)命題之間的沖突,提高診斷結(jié)果的精確性。
4 滾動(dòng)時(shí)域估計(jì)
滾動(dòng)時(shí)域估計(jì)(Moving Horizon Estimation,MHE)可以將估計(jì)問(wèn)題轉(zhuǎn)為優(yōu)化問(wèn)題,同時(shí)將系統(tǒng)的約束條件描述在優(yōu)化問(wèn)題中,通過(guò)在線滾動(dòng)優(yōu)化使其動(dòng)態(tài)滿足[2]。
考慮如下類型的線性離散系統(tǒng)
Xk+1=AXk+GWk
(23)
Zk=CXk+Vk
(24)
其中,Xk為系統(tǒng)狀態(tài),Zk為測(cè)量輸出,Wk為系統(tǒng)噪聲,Vk為量測(cè)噪聲,A為狀態(tài)轉(zhuǎn)移矩陣,G為輸入矩陣,C為量測(cè)矩陣。

(25)
滿足約束式(26)~(28)。
xk+1=f(xk,uk,wk,k)
(26)
yk=h(xk,k)+vk
(27)
xk∈Xk,wk∈Wk,vk∈Vk
(28)
其中,h(xk,k)為非線性的觀測(cè)函數(shù)。
通過(guò)引入固定的數(shù)據(jù)時(shí)域,可以將帶約束優(yōu)化問(wèn)題的計(jì)算時(shí)域分為兩個(gè)部分
{t1:0≤k≤T-N-1}和{t2:T-N≤k≤T-1},目標(biāo)函數(shù)定義為式(29)
(29)
定義到達(dá)代價(jià)函數(shù)為式(30)
(30)
其中,極小化問(wèn)題滿足約束式(26)~(28)。在此基礎(chǔ)上根據(jù)前向動(dòng)態(tài)規(guī)劃原理,可以將優(yōu)化問(wèn)題等價(jià)為式(31)
ΘT-N(xT-N))
(31)
并且
(32)
滿足約束式(26)~(28),N為滾動(dòng)時(shí)域窗口長(zhǎng)度。
對(duì)于非線性目標(biāo)運(yùn)動(dòng)模型,使用擴(kuò)展卡爾曼濾波和滾動(dòng)時(shí)域估計(jì)算法得到目標(biāo)的狀態(tài)估計(jì)[25]。
擴(kuò)展卡爾曼濾波的狀態(tài)估計(jì)和狀態(tài)估計(jì)的協(xié)方差矩陣的遞推估計(jì)方程如式(33),(34)
(33)
(34)

基于擴(kuò)展卡爾曼濾波的滾動(dòng)時(shí)域估計(jì)的狀態(tài)估計(jì)遞推方程如下
(35)
其中,T為當(dāng)前仿真時(shí)刻。
5 基于證據(jù)理論融合和滾動(dòng)時(shí)域估計(jì)的診斷模型
5.1 神經(jīng)網(wǎng)絡(luò)診斷模型
神經(jīng)網(wǎng)絡(luò)的訓(xùn)練誤差是一個(gè)不確定因素。網(wǎng)絡(luò)輸出節(jié)點(diǎn)的輸出被歸一化處理為焦點(diǎn)元素的基本概率值并代入計(jì)算公式
(36)
其中,fi表示故障模式,y(fi)表示神經(jīng)網(wǎng)絡(luò)的輸出結(jié)果,En表示神經(jīng)網(wǎng)絡(luò)樣本誤差。
由于發(fā)動(dòng)機(jī)的構(gòu)型和參數(shù)是固定的,因此,在飛行前可以建立一系列的故障模式,并建立其特征參量模型,這些作為在線軌跡的先驗(yàn)信息。通過(guò)對(duì)飛行狀態(tài)的觀測(cè)來(lái)估計(jì)發(fā)動(dòng)機(jī)故障模式。神經(jīng)網(wǎng)絡(luò)的輸入選取為運(yùn)載火箭的箭體坐標(biāo)系下的三軸視加速度和三軸角速度,為了滿足網(wǎng)絡(luò)對(duì)輸入輸出的要求,須在訓(xùn)練開(kāi)始之前對(duì)數(shù)據(jù)進(jìn)行歸一化處理;輸出選取運(yùn)載火箭的故障模式矩陣。建立故障類型矩陣如表 1所示。
5.2 證據(jù)理論融合診斷模型
由BP神經(jīng)網(wǎng)絡(luò)、RBF神經(jīng)網(wǎng)絡(luò)和D-S證據(jù)理論決策融合系統(tǒng)組成的運(yùn)載火箭發(fā)動(dòng)機(jī)故障模式融合診斷系統(tǒng)如圖 5所示。
識(shí)別框架為
Θ=(ENG11,ENG12,ENG13,ENG14,ENG15,ENG21,ENG22,ENG23,ENG24,ENG25,ENG31,ENG32,ENG33,ENG34,ENG35,ENG41,ENG42,ENG43,ENG44,ENG45)。
定義一種新的基本函數(shù)構(gòu)建方法,以式(37)作為基本概率函數(shù)
(37)
m(Θ)=En
(38)
C(Ai)為BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)的初步診斷結(jié)果,m(Θ)為證據(jù)體的不確定性表示,N為故障類型數(shù),En表示BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)診斷結(jié)果與期望值的均方差。
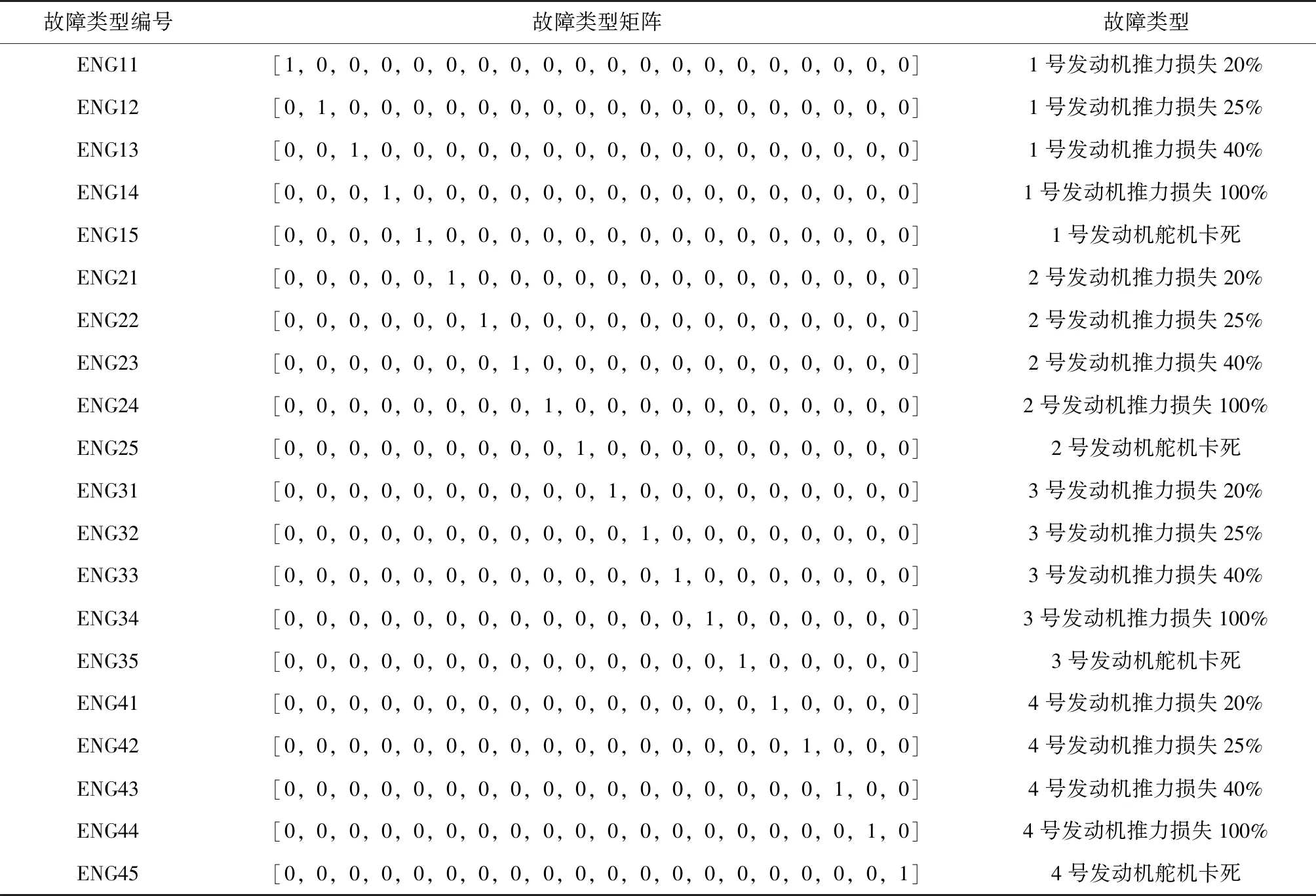
表1 故障類型矩陣
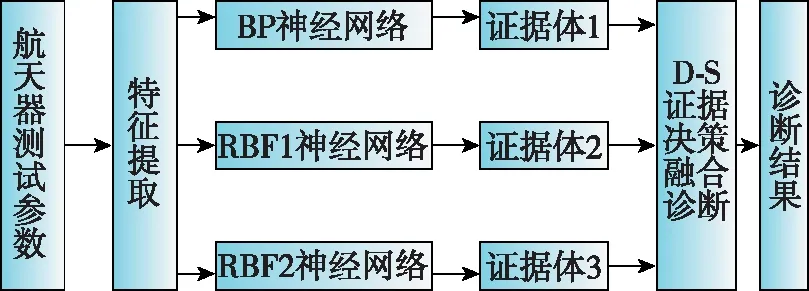
圖5 火箭故障融合診斷系統(tǒng)Fig.5 Fusion diagnosis system of rocket fault
5.3 滾動(dòng)時(shí)域估計(jì)算法模型
系統(tǒng)的狀態(tài)向量為
分別為運(yùn)載火箭在發(fā)射坐標(biāo)系下的加速度、角速度、速度以及位置。
量測(cè)向量為
分別為運(yùn)載火箭彈體坐標(biāo)系下的三軸視加速度。
單個(gè)發(fā)動(dòng)機(jī)推力損失量
Ploss=Pc-Pr
(39)
其中,Pc為發(fā)動(dòng)機(jī)當(dāng)前總推力,Pr為發(fā)動(dòng)機(jī)額定總推力。
單個(gè)發(fā)動(dòng)機(jī)推力損失百分比
(40)
6 仿真算例
6.1 BP網(wǎng)絡(luò)診斷結(jié)果
仿真生成8 000組不同故障模式下的數(shù)據(jù),利用6 000組數(shù)據(jù)作為訓(xùn)練樣本,2 000組數(shù)據(jù)作為檢測(cè)樣本。
選取BP神經(jīng)網(wǎng)絡(luò)精度為0.001,網(wǎng)絡(luò)學(xué)習(xí)率為0.5,最大訓(xùn)練次數(shù)為300次。隱含層神經(jīng)元個(gè)數(shù)為128的訓(xùn)練效果如圖 6所示。
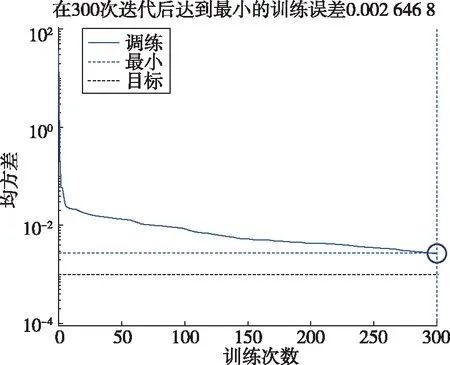
圖6 BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練效果Fig.6 Training performance of BP neural network
對(duì)2 000組測(cè)試數(shù)據(jù)使用訓(xùn)練好的BP神經(jīng)網(wǎng)絡(luò)診斷,診斷正確率為99.1%。
6.2 RBF網(wǎng)絡(luò)診斷結(jié)果
選取RBF神經(jīng)網(wǎng)絡(luò)的目標(biāo)精度為0.01,網(wǎng)絡(luò)傳播速度為1,最大訓(xùn)練次數(shù)為500次。訓(xùn)練效果如圖 7所示。
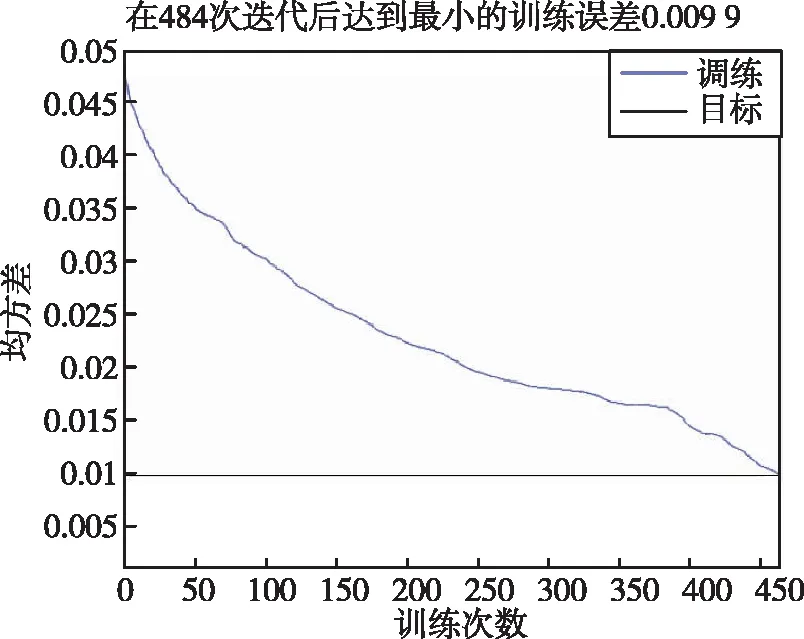
圖7 RBF神經(jīng)網(wǎng)絡(luò)訓(xùn)練效果Fig.7 Training performance of RBF neural network
對(duì)2 000組測(cè)試數(shù)據(jù)使用訓(xùn)練好的RBF神經(jīng)網(wǎng)絡(luò)診斷,診斷正確率為99.2%。
6.3 融合診斷算例
算例1:
假設(shè)故障模式為ENG44,運(yùn)載火箭發(fā)動(dòng)機(jī)在100 s時(shí),芯一級(jí)四號(hào)發(fā)動(dòng)機(jī)推力下降100%,首先通過(guò)神經(jīng)網(wǎng)絡(luò)和證據(jù)理論綜合決策,判斷運(yùn)載火箭發(fā)動(dòng)機(jī)的故障模式,其次通過(guò)滾動(dòng)時(shí)域估計(jì)對(duì)運(yùn)載火箭推力損失進(jìn)行估計(jì)。
仿真得到100.01 s時(shí),運(yùn)載火箭的三軸視加速度和三軸角速度數(shù)據(jù)如表 2所示。
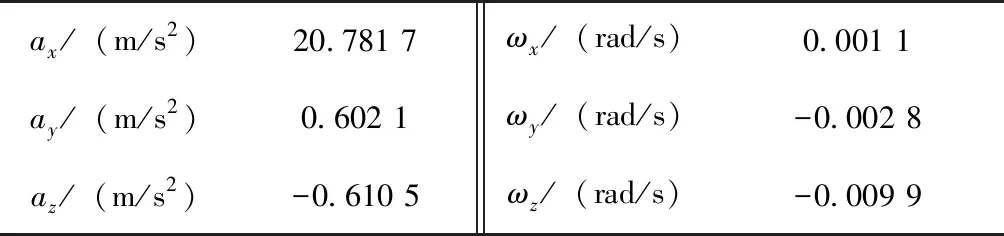
表2 100.01 s時(shí)運(yùn)載火箭部分量測(cè)數(shù)據(jù)
滾動(dòng)時(shí)域估計(jì)窗口長(zhǎng)度N=4。
利用神經(jīng)網(wǎng)絡(luò)進(jìn)行故障模式診斷,神經(jīng)網(wǎng)絡(luò)輸出結(jié)果如表 3所示。
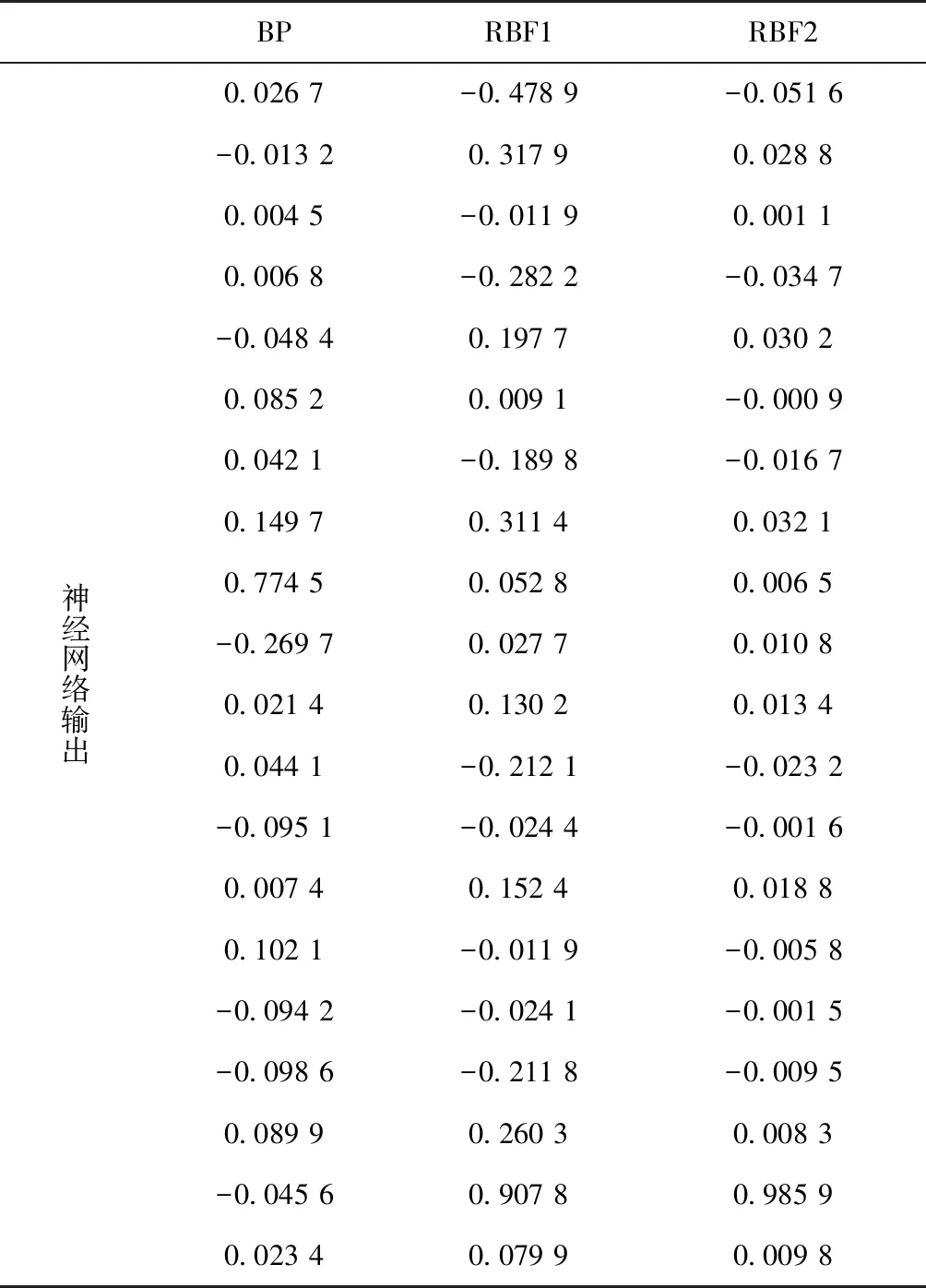
表3 算例1的神經(jīng)網(wǎng)絡(luò)輸出結(jié)果
對(duì)神經(jīng)網(wǎng)絡(luò)的輸出結(jié)果分析,得到火箭故障模式辨識(shí)結(jié)果如表 4所示。
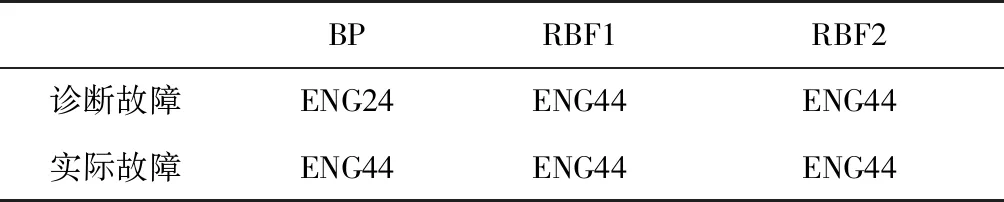
表4 算例1的神經(jīng)網(wǎng)絡(luò)診斷結(jié)果
從表 4可以看到,這組測(cè)試數(shù)據(jù)采用BP神經(jīng)網(wǎng)絡(luò)進(jìn)行診斷時(shí)出現(xiàn)誤診。從診斷結(jié)果的可靠性角度思考,采用不同的神經(jīng)網(wǎng)絡(luò)會(huì)有不同的診斷結(jié)果,不能確定哪種方法的診斷結(jié)果是正確的,因此使用D-S證據(jù)理論融合診斷結(jié)果,確定運(yùn)載火箭故障類別。首先構(gòu)建證據(jù)體,將ENG44故障狀態(tài)下的神經(jīng)網(wǎng)絡(luò)結(jié)果處理得到基本概率分配,經(jīng)D-S證據(jù)理論融合診斷后,結(jié)果如表 5所示。
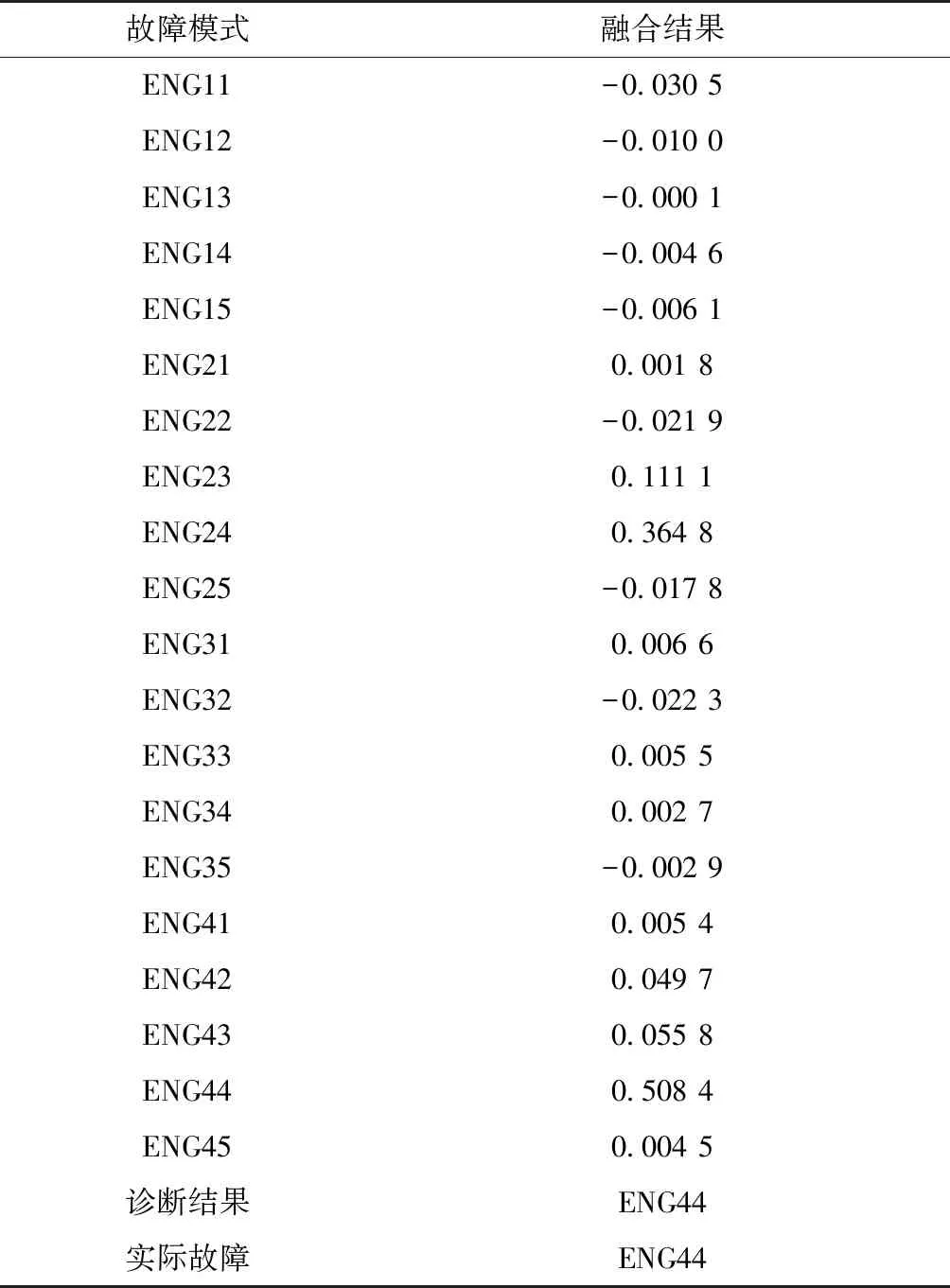
表5 算例1的證據(jù)理論融合診斷結(jié)果
從表 5可以看出,采用D-S證據(jù)理論融合的診斷結(jié)果與實(shí)際故障模式一致。基于滾動(dòng)時(shí)域估計(jì)的運(yùn)載火箭飛行狀態(tài)特征量估計(jì)的仿真結(jié)果如圖8~14所示。
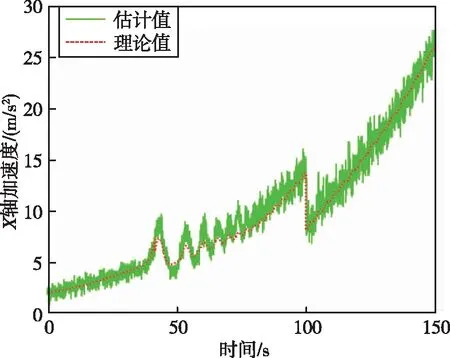
圖8 箭體系下X軸加速度Fig.8 X-axis acceleration in the body coordinate system
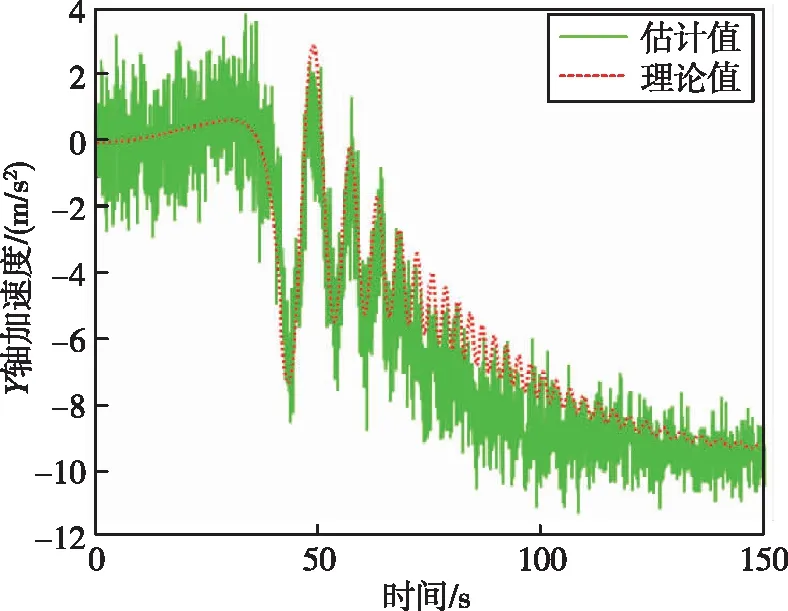
圖9 箭體系下Y軸加速度Fig.9 Y-axis acceleration in the body coordinate system
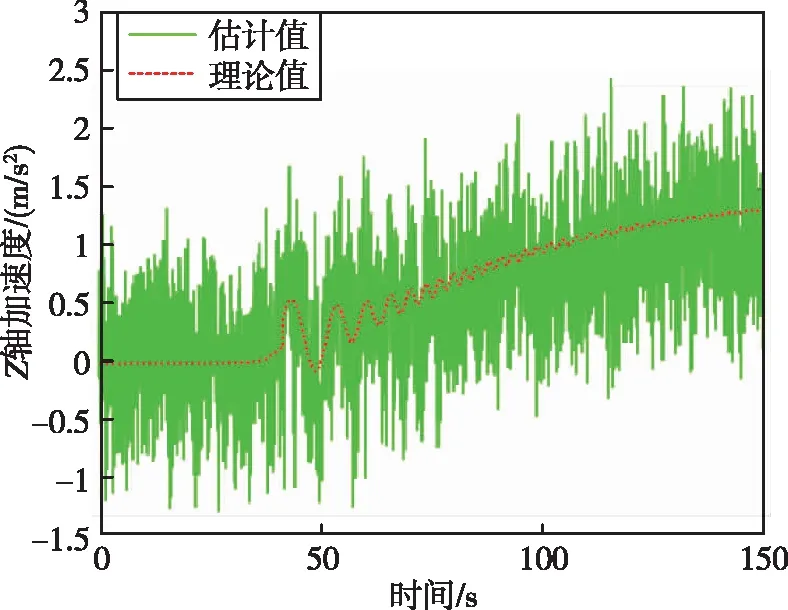
圖10 箭體系下Z軸加速度Fig.10 Z-axis acceleration in the body coordinate system

圖11 箭體系下X軸角速度Fig.11 X-axis angular velocity in the body coordinate system

圖12 箭體系下Y軸角速度Fig.12 Y-axis angular velocity in the body coordinate system
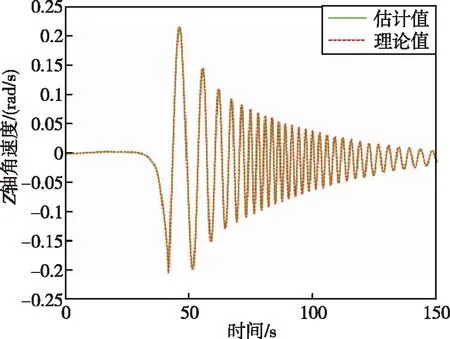
圖13 箭體系下Z軸角速度Fig.13 Z-axis angular velocity in the body coordinate system
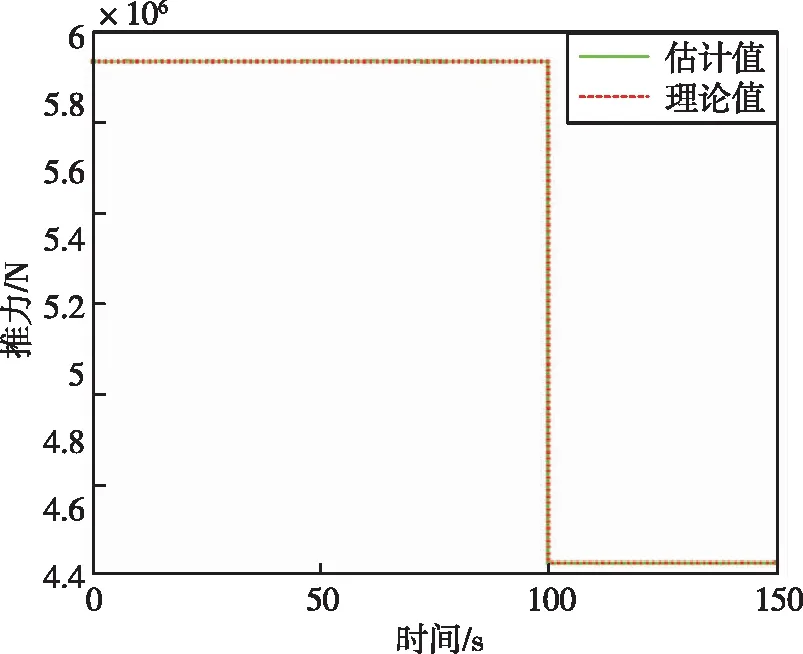
圖14 運(yùn)載火箭總推力Fig.14 Total thrust of rocket
通過(guò)圖 8~13可以看出,滾動(dòng)時(shí)域估計(jì)方法能夠很好地估計(jì)出運(yùn)載火箭故障模式下的三軸加速度以及三軸角速度。通過(guò)圖 14可以看出,在100 s時(shí),運(yùn)載火箭總推力下降了25%,綜合通過(guò)證據(jù)理論和神經(jīng)網(wǎng)絡(luò)得到的運(yùn)載火箭發(fā)動(dòng)機(jī)故障模式,可以判斷運(yùn)載火箭故障類型為四號(hào)發(fā)動(dòng)機(jī)在100 s時(shí)推力下降了100%,符合仿真設(shè)定的故障模式。
算例2:
假設(shè)故障模式為ENG15,運(yùn)載火箭在80 s時(shí),芯一級(jí)一號(hào)發(fā)動(dòng)機(jī)舵機(jī)卡死,通過(guò)神經(jīng)網(wǎng)絡(luò)和證據(jù)理論綜合決策,判斷運(yùn)載火箭發(fā)動(dòng)機(jī)的故障模式。
仿真得到80.01 s時(shí),運(yùn)載火箭的三軸視加速度和三軸角速度數(shù)據(jù)如表 6所示。
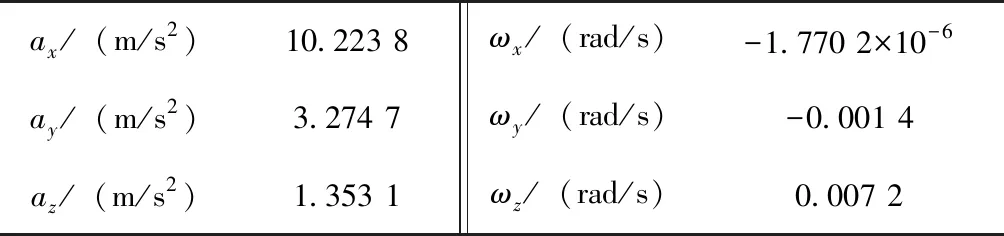
表6 80.01 s時(shí)運(yùn)載火箭部分量測(cè)數(shù)據(jù)
利用神經(jīng)網(wǎng)絡(luò)進(jìn)行故障模式診斷,神經(jīng)網(wǎng)絡(luò)輸出結(jié)果如表 7所示。
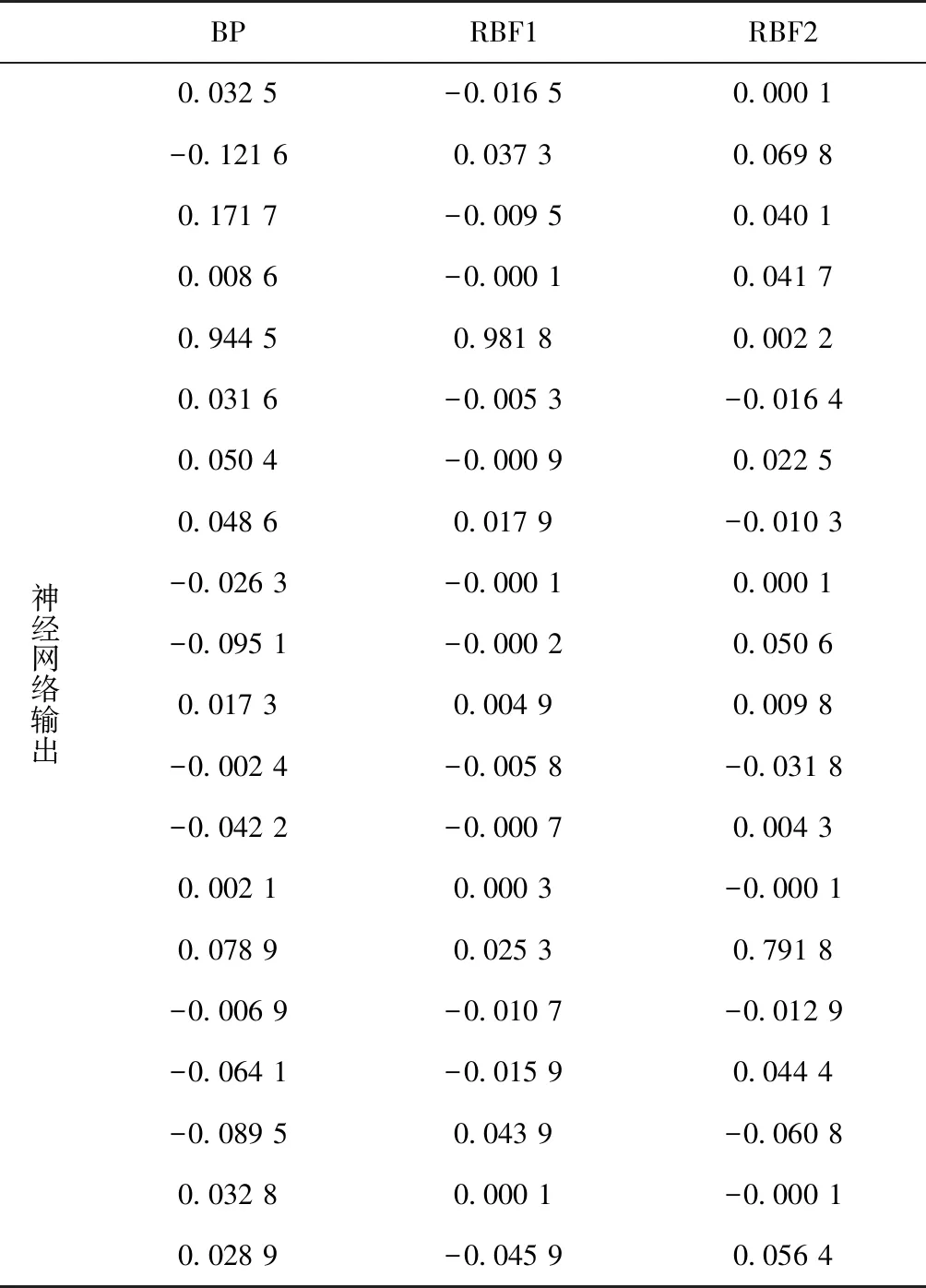
表7 算例2的神經(jīng)網(wǎng)絡(luò)輸出結(jié)果
對(duì)神經(jīng)網(wǎng)絡(luò)的輸出結(jié)果進(jìn)行分析,得到火箭故障模式辨識(shí)結(jié)果如表 8所示。
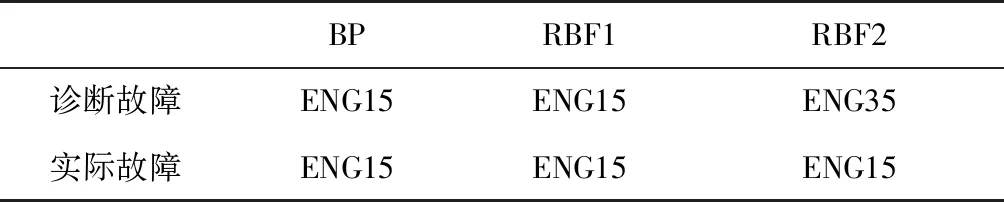
表8 算例2的神經(jīng)網(wǎng)絡(luò)診斷結(jié)果
從表8可以看到,這組測(cè)試數(shù)據(jù)采用RBF2神經(jīng)網(wǎng)絡(luò)進(jìn)行診斷時(shí)出現(xiàn)誤診,進(jìn)而使用D-S證據(jù)理論融合診斷結(jié)果,確定運(yùn)載火箭故障類別。首先構(gòu)建證據(jù)體,將ENG15故障狀態(tài)下的神經(jīng)網(wǎng)絡(luò)結(jié)果處理得到基本概率分配,經(jīng)D-S證據(jù)理論融合診斷后,結(jié)果如表 9所示。
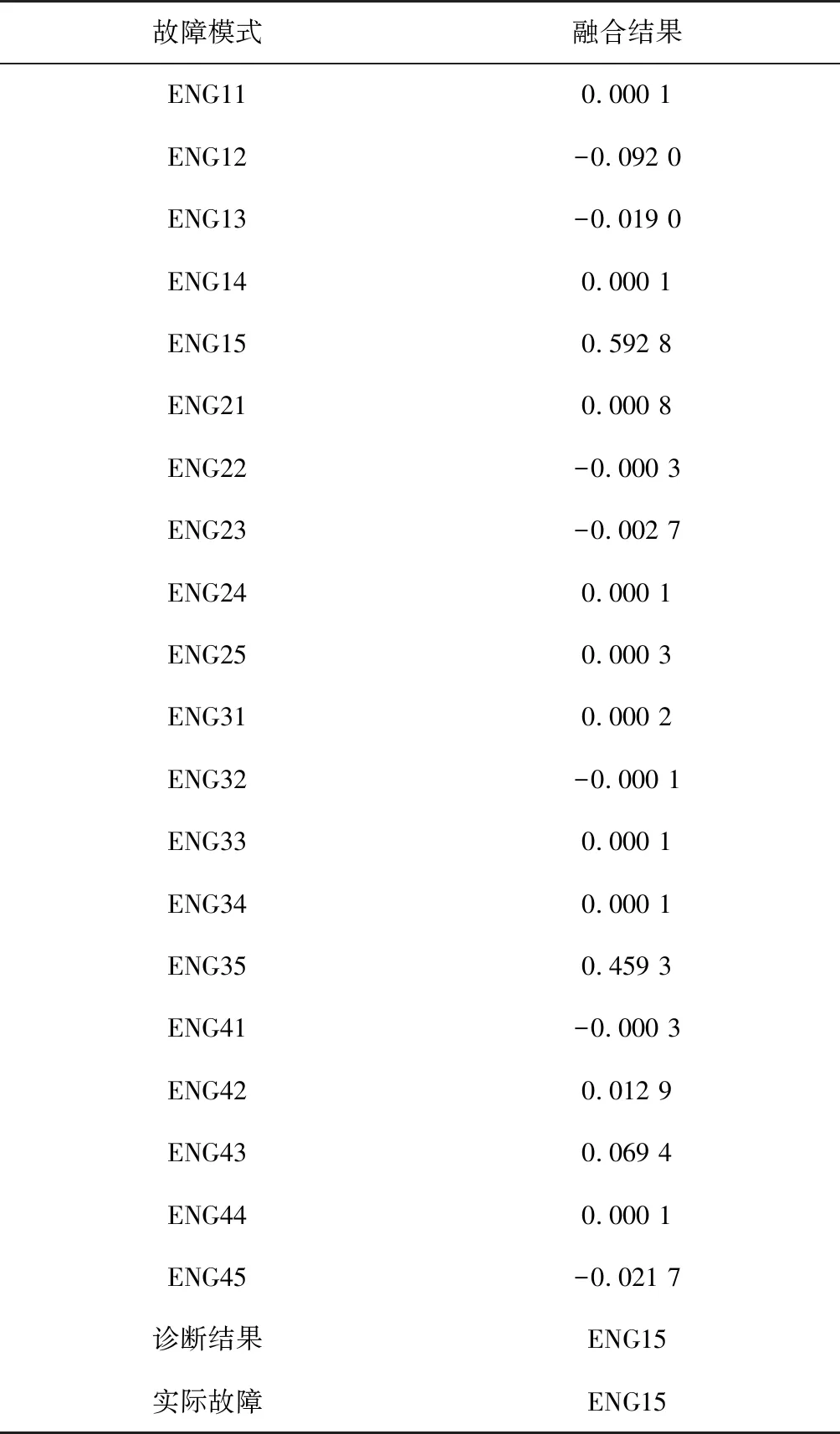
表9 算例2的證據(jù)理論融合診斷結(jié)果
從表9可以看出,采用D-S證據(jù)理論融合診斷的故障模式與實(shí)際故障模式一致。
基于神經(jīng)網(wǎng)絡(luò)和D-S證據(jù)理論,對(duì)2 000組測(cè)試數(shù)據(jù)進(jìn)行檢測(cè),辨識(shí)正確率為99.4%。
7 結(jié)論
本文以運(yùn)載火箭動(dòng)力系統(tǒng)故障為背景,研究了基于BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)的運(yùn)載火箭發(fā)動(dòng)機(jī)故障模式診斷方法,并提出通過(guò)D-S證據(jù)融合理論綜合神經(jīng)網(wǎng)絡(luò)的診斷結(jié)果,確定故障類型后通過(guò)滾動(dòng)時(shí)域估計(jì)方法估計(jì)火箭飛行狀態(tài)特征量。通過(guò)仿真案例表明神經(jīng)網(wǎng)絡(luò)對(duì)于故障模式的辨別有較高的正確率,再通過(guò)證據(jù)理論能夠有效提高診斷的準(zhǔn)確率,滾動(dòng)時(shí)域估計(jì)方法能夠在線估計(jì)火箭飛行狀態(tài)特征量,以便對(duì)火箭故障進(jìn)行更精準(zhǔn)的判斷。該方法還可應(yīng)用于運(yùn)載火箭其他模式的故障診斷中,為火箭故障診斷提供了新方法。
猜你喜歡
當(dāng)代陜西(2022年5期)2022-04-19 12:10:18
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學(xué)學(xué)報(bào)(自然科學(xué)版)(2020年4期)2020-12-14 07:05:00
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48