基于GPRS和GPS技術的移動油罐監(jiān)控系統(tǒng)
2020-08-03 02:56:30武麗英侯建勤
自動化儀表 2020年7期
武麗英,侯建勤
(上海工業(yè)自動化儀表研究院有限公司,上海 200233)
0 引言
移動油罐車擔負著從油庫到各個加油站的油品運輸任務。由于油罐的移動性,移動油罐車的管理相當困難。在運輸過程中,因其存儲的物質大多是易燃易爆產品,當油罐內溫度過高或者壓力過大時,容易發(fā)生爆炸,造成極大危害[1-2]。為了解決這一問題、掌握油罐的運行情況,一些企業(yè)采用人工投尺、人工采樣和人工計量等方式。這種方式不但勞動強度很大,而且危險性也非常大,油罐爆炸和傷亡事件時有發(fā)生。
本文設計的基于通用分組無線業(yè)務(general packet radio service,GPRS)和全球定位系統(tǒng)(global positioning system,GPS)的移動油罐監(jiān)控系統(tǒng),可以自動監(jiān)控并記錄移動油罐車的壓力、液位、溫度和運行位置,掌握油罐車的運輸狀況。該系統(tǒng)不但保證了油罐車的安全、經濟運行,提高了石油運輸企業(yè)的運營工作效率和安全管理水平,而且對整個運輸行業(yè)的智能化發(fā)展起到了推動作用。
1 系統(tǒng)總體結構設計
本文設計的基于GPRS和GPS的移動油罐監(jiān)控系統(tǒng),主要包括罐體、傳感器、智能檢測器、報警器、服務器和客戶端六部分。移動油罐監(jiān)控系統(tǒng)架構如圖1所示。傳感器包括壓力傳感器、溫度傳感器和液位傳感器[9],分別采集油罐內的壓力、溫度[10]和液位[11]信息,轉換為0~5 V的標準電壓信號并傳輸給智能檢測器。通過智能檢測器的數(shù)據(jù)采集模塊進行采集,將數(shù)據(jù)發(fā)送給中央處理器(central processing unit,CPU)處理模塊,進行轉換計算,并通過顯示模塊顯示在顯示屏。同時, GPS通信模塊定時獲取油罐車三坐標的位置信息,傳輸給CPU處理模塊。CPU處理模塊通過GPRS通信模塊把所有數(shù)據(jù)定時傳輸給服務器,完成數(shù)據(jù)的分析、處理和存儲。客戶端通過輸入不同的權限進行設置和查詢各參數(shù)數(shù)值,通過輸入不同的時段,可查看或打印各參數(shù)的歷史報表和相關報警記錄。同時,智能檢測器可以對超范圍的情況進行現(xiàn)場報警并顯示,以提醒工作人員安全處理。

圖1 移動油罐監(jiān)控系統(tǒng)架構圖
2 網(wǎng)絡傳輸結構設計
考慮到油罐車移動非常頻繁,為了保證在運輸過程中可以及時了解油罐的運輸狀態(tài),本文采用資費較低且覆蓋極為廣泛的GPRS無線網(wǎng)絡作為采集信息的遠程無線傳輸網(wǎng)絡,采用GPS[3-7]衛(wèi)星技術作為油罐車的移動定位系統(tǒng),從而記錄整個移動油罐車的運行軌跡[4-10]。本文涉及的采集信息經過智能檢測器就地處理之后,把簡化后的信息上傳到服務器上。這樣不僅降低誤操作,保證可靠性,而且也降低了對寬帶的要求。
3 系統(tǒng)硬件設計
本系統(tǒng)的硬件設計主要基于智能檢測器以及服務器平臺。
3.1 智能檢測器硬件設計
智能檢測器硬件設計主要包括四部分:電源部分、傳感器接入部分、數(shù)據(jù)處理與顯示部分、通信部分。智能檢測器原理框圖如圖2所示。
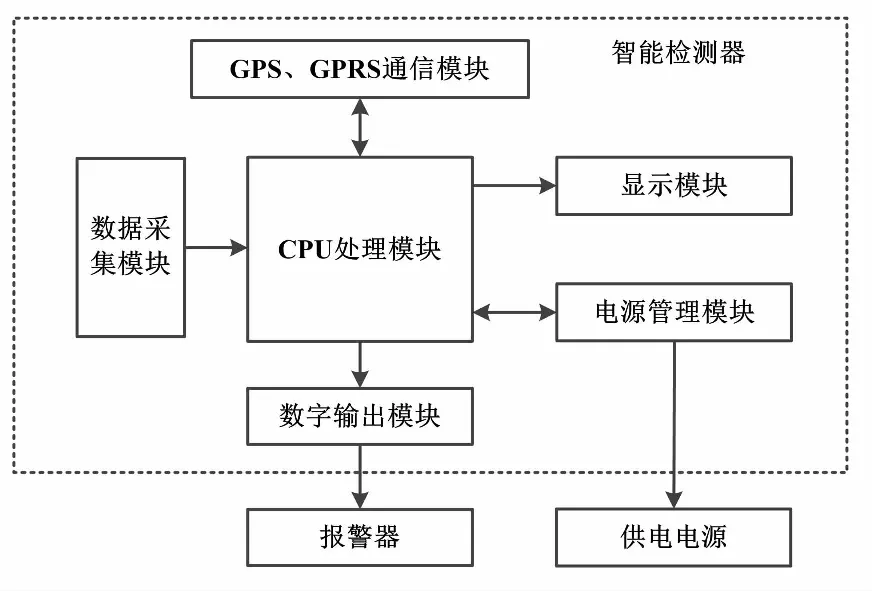
圖2 智能檢測器原理框圖
①電源部分。
電源部分包括供電電源和電源管理模塊,整體實現(xiàn)智能檢測器及傳感器的能量供給和分配管理。
供電電源由12 V、10 A鋰電池與20 W、12 V 太陽能充電電池板組成。鋰電池與太陽能充電逆變器包裝采用鋁合金防爆盒包裝,輸入/輸出接頭都采用2芯航空防水接頭與智能檢測器連接。太陽能電池板功率50 W,面積約0.3 m2,厚度不超過1 cm。
電源管理模塊為智能檢測器各個模塊供電。其供電穩(wěn)定性是車模穩(wěn)定運行的基礎,在設計時要考慮到每個模塊的供電電壓、電流以及模塊工作所允許的噪聲干擾。在本文中,除了考慮以上因素外,還要考慮到系統(tǒng)的低功耗需求。本文的CPU供電模塊選擇LP2992AIMX-3.3 V,輸入端除了接入必要的TVS管、壓敏電阻、保險絲外,還增加了DN2540來承擔一部分電壓,降低低壓差線性穩(wěn)壓器上的壓降。GPS[12]和GPRS模塊[13]采用TPS62140_ARGT_16電源模塊,只有在CPU喚醒的狀態(tài)下,回路才進行工作。模擬回路的電源與通信模塊的電源通過定制的高頻變壓器進行隔離,以實現(xiàn)整機電源低功耗需求。
②傳感器接入部分。
本設計中的油罐傳感器主要包括壓力傳感器、液位傳感器[5]和溫度傳感器[6-14]。其中,壓力傳感器和液位傳感器都采用兩線制,直接接入主板模擬量接口,接頭形式采用防水航空接頭。傳感器輸入采用0~5 V的標準輸出信號,傳感器的供電電壓為12 V,與智能檢測器使用同一個供電源。

圖3 溫度采集電路圖
③數(shù)據(jù)處理與顯示部分。
數(shù)據(jù)處理和顯示模塊主要完成對采集數(shù)據(jù)的處理和顯示,包括CPU處理模塊、數(shù)字輸出模塊和顯示模塊。
CPU處理模塊采用ST 公司推出的基于ARM Cortex-M3內核的微控制器STM32F103RCT6,內置128 KB的Flash存儲器以及20 KB的數(shù)據(jù)存儲器,還集成了USART通信口、SPI接口等多種資源,是一款非常適用于低功耗及處理要求高度集成的應用。復位電路包括硬件復位電路和軟件復位電路,以保證設備的安全、可靠運行。
數(shù)字輸出模塊采用達林頓管驅動機械繼電器的方式進行輸出控制,可用于控制報警器。報警器安裝在司機駕駛室。當所采集的數(shù)據(jù)發(fā)生異常時,工作人員能及時查看。
顯示模塊采用2.9英寸(1英寸=25.4 mm)的低功耗電子墨水屏GDE029A1,工作電壓為2.4~3.7 V,通過SPI方式進行通信,可支持全局/局部刷新。刷新功耗:功率為26.4 mW,刷新時間定在CPU喚醒的時候進行刷新。
④通信部分。
通信部分包含GPS衛(wèi)星通信、GPRS網(wǎng)絡通信和串口通信三部分。
GPS衛(wèi)星主要采集移動油罐車的定位信息,GPRS網(wǎng)絡通信主要完成對采集數(shù)據(jù)的上傳。在設計時,選擇了將數(shù)據(jù)傳輸和定位功能GPS/GPRS[8]二合一模塊USR-GM3P。這是一款以物聯(lián)網(wǎng)為核心的工業(yè)物聯(lián)網(wǎng)模塊解決方案,簡單可靠,可通過UART方式與CPU處理模塊進行通信。GPS天線與GPRS天線與模塊集成在一起,便于開發(fā)應用。
串口通信用于智能檢測器與個人計算機的調試。當系統(tǒng)出現(xiàn)問題時,借助預留的串口調試口進行處理[7]。
3.2 服務平臺的搭建
服務平臺是移動油罐監(jiān)控系統(tǒng)的數(shù)據(jù)處理中心,采集各個移動油罐的傳感信息和定位信息,并將其存儲在相應的數(shù)據(jù)庫中。
4 系統(tǒng)軟件設計
系統(tǒng)軟件設計主要包括智能檢測器軟件設計和客戶端軟件設計兩部分。
4.1 智能檢測器軟件設計
①智能檢測器主流程。
智能檢測器采用C語言進行編程和編寫,以TKStudio集成開發(fā)環(huán)境作為軟件開發(fā)和調試平臺。智能檢測器軟件流程如圖4所示。

圖4 智能檢測器軟件流程圖
首先對系統(tǒng)進行初始化并打開中斷,進行模/數(shù)(analog/digital,A/D)采樣。采樣完成,對數(shù)據(jù)進行計算并顯示;當數(shù)據(jù)超限時,驅動報警。同時,數(shù)據(jù)通過GPRS網(wǎng)絡上傳到服務器。當采集的數(shù)據(jù)異常時,驅動現(xiàn)場報警設備,并發(fā)送錯誤類型代碼給服務器,以便確認問題。
②A/D采樣濾波算法。
為了保證測量的穩(wěn)定性,在完成A/D采樣以后,要對采樣值進行數(shù)字濾波。濾波算法采用一階滯后數(shù)字濾波算法。當采樣周期遠小于濾波時間常數(shù)時,該算法等價于一般的一階滯后RC模擬濾波器,對周期性干擾具有良好的抑制作用,適用于波動頻率較高參數(shù)的濾波。濾波時間常數(shù)選擇,根據(jù)經驗設定,采用固定濾波時間常數(shù)的濾波算法,如式(1)所示。
(1)

4.2 客戶端軟件設計
本文設計了基于GPRS和GPS的移動油罐監(jiān)控系統(tǒng)。客戶端用戶通過瀏覽器可以遠程查看移動油罐車的相關信息,包括油罐的當前壓力、溫度、液位以及定位信息、歷史信息、報警信息和報表信息[15]。系統(tǒng)功能模塊如圖5所示。
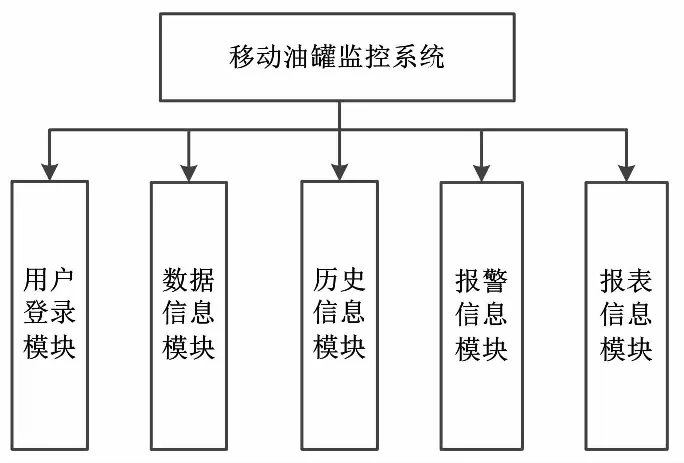
圖5 系統(tǒng)功能模塊圖
5 結論
本文設計的基于GPRS和GPS的移動油罐監(jiān)控系統(tǒng),采用了GPS對移動油罐的自動定位,解決了移動油罐運輸路線難以掌握的情況;采用了GPRS技術對移動油罐相關信息進行監(jiān)控,解決了油罐車安全運輸?shù)碾[患問題。長期應用表明,移動油罐系統(tǒng)設計合理、性能穩(wěn)定,有效保證了移動油罐的安全、經濟運行,一定程度上提高了企業(yè)的經濟效益,對整個運輸行業(yè)的智能化發(fā)展起到了推動作用。下一步結合移動油罐車的供電增加視頻監(jiān)控系統(tǒng)[16],以保證系統(tǒng)具有更好的適應性和應用可行性。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
