基于物聯網的老人遠程智能看護終端的研究
2020-07-30 14:04:34龍丹劉欣莫永華
科技視界 2020年19期
龍丹 劉欣 莫永華
摘 要
中國老齡化人口逐步增多,受限于養老機構的數量及當下中青年夫妻面臨的巨大生活壓力,與老年人的健康與看護相關的社會養老問題矛盾日益突出,本文對基于物聯網的老人遠程智能看護系統中的智能看護終端進行研究,并給出相應的模塊化設計方案。
關鍵詞
物聯網技術;遠程看護;智能看護設備
中圖分類號: R197.1? ? ? 文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.19.055
Abstract
China's aging population is gradually increasing, limited by the number of pension institutions and the huge life pressure of young and middle-aged couples,the contradiction of social pension problems related to the health and care of the elderly is increasingly prominent.This paper studies the intelligent care terminal in the remote intelligent care system for the elderly based on the Internet of things, and gives the corresponding modular design scheme.
Key Words
Internet of things technology;Remote care;Intelligent care equipment
社會人口的老齡化是一個非常嚴峻的問題,目前,中國老齡化人口達到2億人,中國老齡化時代已然到來。作為社會中流砥柱的“80后”,在面對“4+2+1”的大家庭模式時,生活壓力之大可想而知。對于老人看護這樣一個社會問題,利用物聯網技術和網絡資源實現遠程看護是一個有效的解決辦法。
1 遠程智能看護系統解決方案
基于物聯網技術的老人遠程智能看護系統通過對采集的數據進行分析比對來判斷老人身體狀況有無異常,比對結果異常及時向家屬、社區或相關機構發送報警信息,并提供老人的定位信息。系統從數據采集與傳輸、云平臺和手機客戶端三個方面進行設計與實現,其中的智能看護終端的研究,是系統解決方案的重要組成部分,以下給出該智能看護終端相應的設計方案。
2 智能看護終端的總體設計
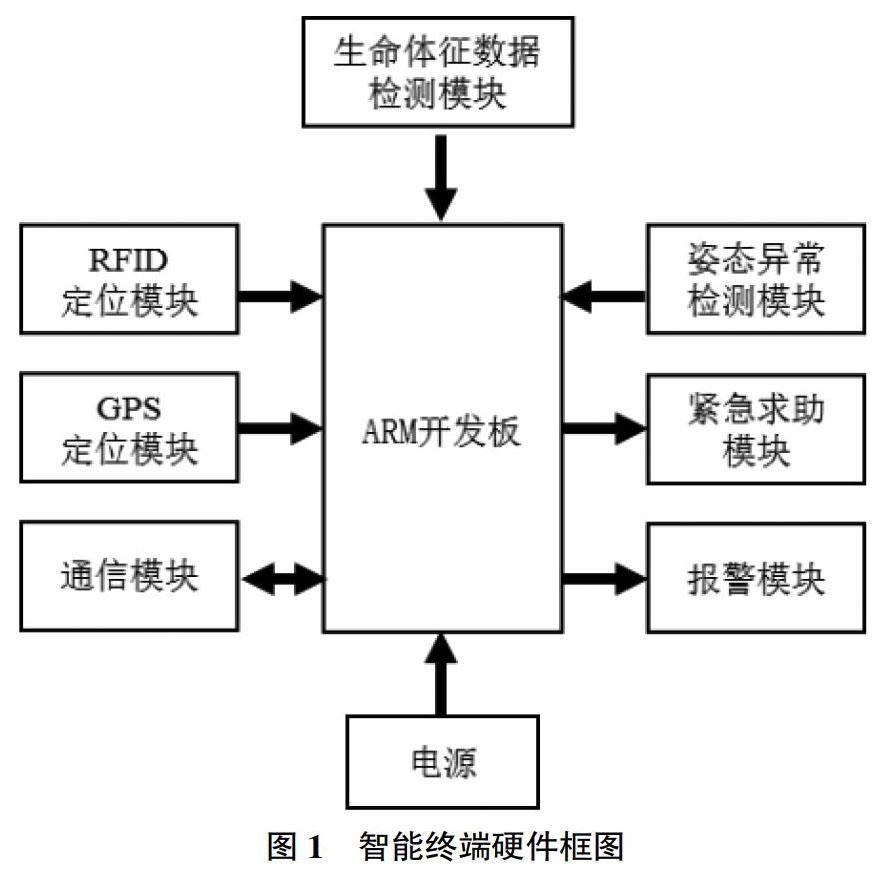
該智能看護終端的系統電路采用模塊化設計,包括生命體征檢測模塊、定位模塊、姿態異常檢測模塊、緊急求助模塊、報警模塊、GPRS通信模塊等,相應的智能終端硬件框圖見圖1。
3 主要模塊設計
因系統主要是對生命體征信息、位置信息和姿態信息進行采集,故對該智能終端進行了以下幾個主要模塊的設計。
(1)生命體征檢測模塊
在不影響老人正常生活的前提下,通過傳感器對老年人的體溫、脈搏等生命體征信息進行采集,并定期傳送到云平臺。
(2)定位模塊
考慮室外和室內的環境差異,定位模塊又分為室外定位和室內定位兩個子模塊,結合GPS和RFID技術實現精準定位,為家屬日常了解老人位置,或是遇突發情況進行緊急處理提供可靠數據。
(3)姿態異常檢測模塊
該模塊利用加速度傳感器,以檢測老人的肢體動作為依據,可自動識別并及時發現老人暈倒、摔倒或發病等身體異常,并向家屬、平臺或社區發出異常報警,實現及時的救治。
(4)緊急求助模塊
當老人出現身體不適時,可以通過SOS按鍵主動迅速地連通平臺救助指揮中心,救助指揮系統在向老年人家屬自動發送急救短信的同時定位老人所處位置,現場監聽老年人發出的聲音狀況,并通過救助系統迅速連通老年人家屬、社區和相關急救機構,實現多方通話,協調指揮救助。
(5)報警模塊
該模塊有效利用各類傳感器,對老人的生命體征信號或身體姿態進行對比,如出現異常,立即自動向平臺求助指揮中心或家屬發出報警信息及定位信息,以便及時進行處理。
(6)通信模塊
使用2G、3G或4G網絡,將數據傳送至云平臺。
4 關鍵問題研究
在整個硬件系統中,有兩個關鍵問題需要處理,一是老人當前位置的定位,二是老人姿態的異常檢測。
(1)定位問題
室外利用GPS定位技術,實現精確的位置定位和定位信息的發送,GPS定位技術相對比較成熟。當老人迷路、走失或發生意外時,可以直接向家屬、平臺或社區等發送緊急求助信號和定位信息。
在室內,受限于遮擋物等原因,使得信號衰減大,GPS定位無法發揮有效定位的作用,系統在設計時,采用RFID技術實現室內定位。RFID基本系統包括電子標簽和讀寫器,讀寫器和電子標簽通過讀寫器天線和標簽天線的耦合完成信號的傳輸。在具體位置數據采集過程中,需要利用蛛網定位算法,利用RFID標簽及RFID 讀寫器進行整體數據收集處理。
(2)姿態異常檢測問題
姿態異常檢測主要是對老人跌到進行檢測,首先定義人體的坐標系統,選擇以胸腔部位作為特征部位建立笛卡爾坐標系Oxyz,坐標系隨人體軀干運動而動,X軸指向軀干前方,Y軸指向左方,Z軸垂直于地面向上,三者成右手直角系。實際中,在抖動、坐下等非摔倒情況中,單個軸的加速度也會發生劇烈規律性變化,且與摔倒情況的變化類似,所以僅根據單軸加速度來判斷摔倒會發生較多誤判情況。但是,摔倒過程中,人體三軸合成加速度|a|變化明顯區別于人體日常活動。
因此,可以選定日常活動和摔倒過程之間存在的合成加速度最佳臨界點aT作為閾值點區分摔倒行為和日常動作。采用加速度閾值點算法來判斷是否摔倒,提取最佳加速度閾值點aT是問題的關鍵所在。這里,可采用運動傳感器MPU6050獲取X,Y,Z軸上的包含加速度計的3個值和陀螺儀的3個值(加速度計可提供三個軸上的加速度信息;陀螺儀可提供三個軸上的角速度信息),通過分析,對老人是否跌到進行檢測。
5 小結
本文的研究目標是設計研究一款能夠在老人遠程智能看護系統中對生命體征、定位信息、姿態信息等數據進行采集的智能終端,以便在一些緊急情況發生時進行快速分析和判斷提供依據。
參考文獻
[1]趙亦俊,張濤.智能穿戴在健康領域發展的現況分析[J].中國衛生信息管理雜志,2015,12(4).
[2]徐利謀,黃長遠.基于物聯網的空巢老人居家看護系統的研究與實現[J].無線互聯科技,2016(13).
[3]李曉珊,張明.面向高齡用戶的可穿戴產品設計研究[J].裝飾,2015(07).
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46
