基于PLC的液壓機(jī)械臂控制技術(shù)研究
2020-07-30 14:04:34楊永江
科技視界 2020年19期
楊永江
摘 要
針對液壓機(jī)械臂,介紹了機(jī)械臂結(jié)構(gòu)、關(guān)鍵傳感器類型,基于機(jī)器人運動學(xué)及三維模型運動仿真擬合出運動方程,通過PLC控制器基于PID算法的速度閉環(huán)控制及位置閉環(huán)控制,最終實現(xiàn)了機(jī)械臂末端裝置水平及垂直位移。
關(guān)鍵詞
液壓機(jī)械臂;機(jī)器人運動學(xué);同步運動;PID閉環(huán)控制
中圖分類號: TP241? ? ? ?文獻(xiàn)標(biāo)識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.19.034
Abstract
For the hydraulic manipulator,the structure of the manipulator and key sensor types are introduced.Based on the robot kinematics and three-dimensional model motion simulation,the motion equations are fitted.The speed closed-loop control and position closed-loop control of the PLC algorithm based on the PID algorithm are finally implemented The horizontal and vertical displacement of the arm end device.
Key Words
Hydraulic mechanical arm;Robot kinematics;Synchronized motion; PID closed-loop control
0 引言
工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置。機(jī)械臂是工業(yè)機(jī)機(jī)器人中的一種重要類型,通過機(jī)器人運動學(xué)及PID控制原理控制機(jī)械連桿完成機(jī)械臂轉(zhuǎn)動、移動或復(fù)合運動,實現(xiàn)機(jī)械臂末端裝置規(guī)定路徑運動、姿態(tài)調(diào)整、位置監(jiān)控等功能。
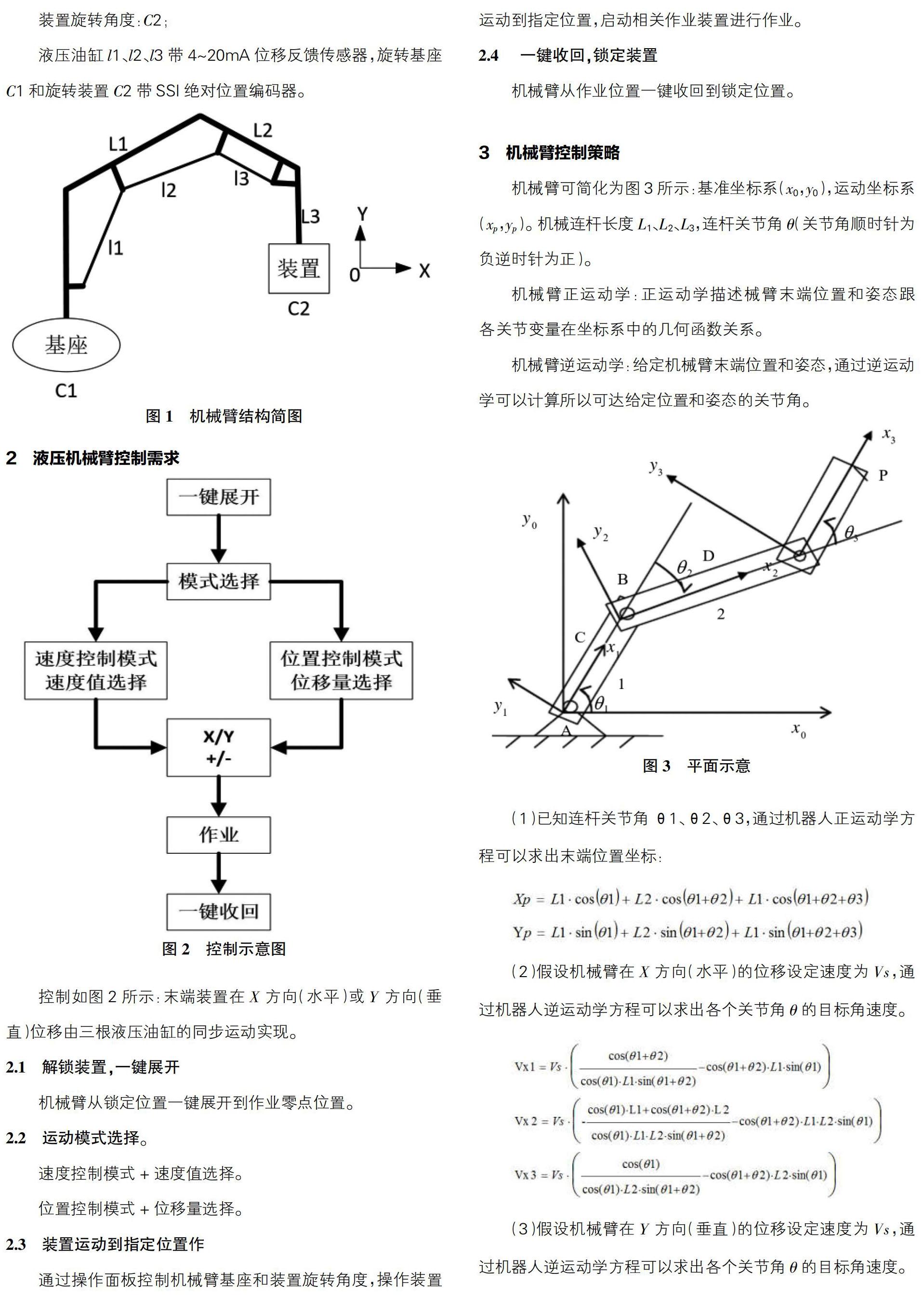
1 液壓機(jī)械臂結(jié)構(gòu)
機(jī)械臂關(guān)鍵部件如圖1所示:包含液壓油缸、旋轉(zhuǎn)基座、旋轉(zhuǎn)裝置。
各關(guān)鍵部件描述:
機(jī)械連桿長度:L1、L2、L3;
液壓油缸伸縮長度:l1、l2、l3;
基座旋轉(zhuǎn)角度:C1;
裝置旋轉(zhuǎn)角度:C2;
液壓油缸l1、l2、l3帶4~20mA位移反饋傳感器,旋轉(zhuǎn)基座C1和旋轉(zhuǎn)裝置C2帶SSI絕對位置編碼器。
2 液壓機(jī)械臂控制需求
控制如圖2所示:末端裝置在X方向(水平)或Y方向(垂直)位移由三根液壓油缸的同步運動實現(xiàn)。
2.1 解鎖裝置,一鍵展開
機(jī)械臂從鎖定位置一鍵展開到作業(yè)零點位置。
2.2 運動模式選擇。
速度控制模式+速度值選擇。
位置控制模式+位移量選擇。
2.3 裝置運動到指定位置作
通過操作面板控制機(jī)械臂基座和裝置旋轉(zhuǎn)角度,操作裝置運動到指定位置,啟動相關(guān)作業(yè)裝置進(jìn)行作業(yè)。
2.4一鍵收回,鎖定裝置
機(jī)械臂從作業(yè)位置一鍵收回到鎖定位置。
3 機(jī)械臂控制策略
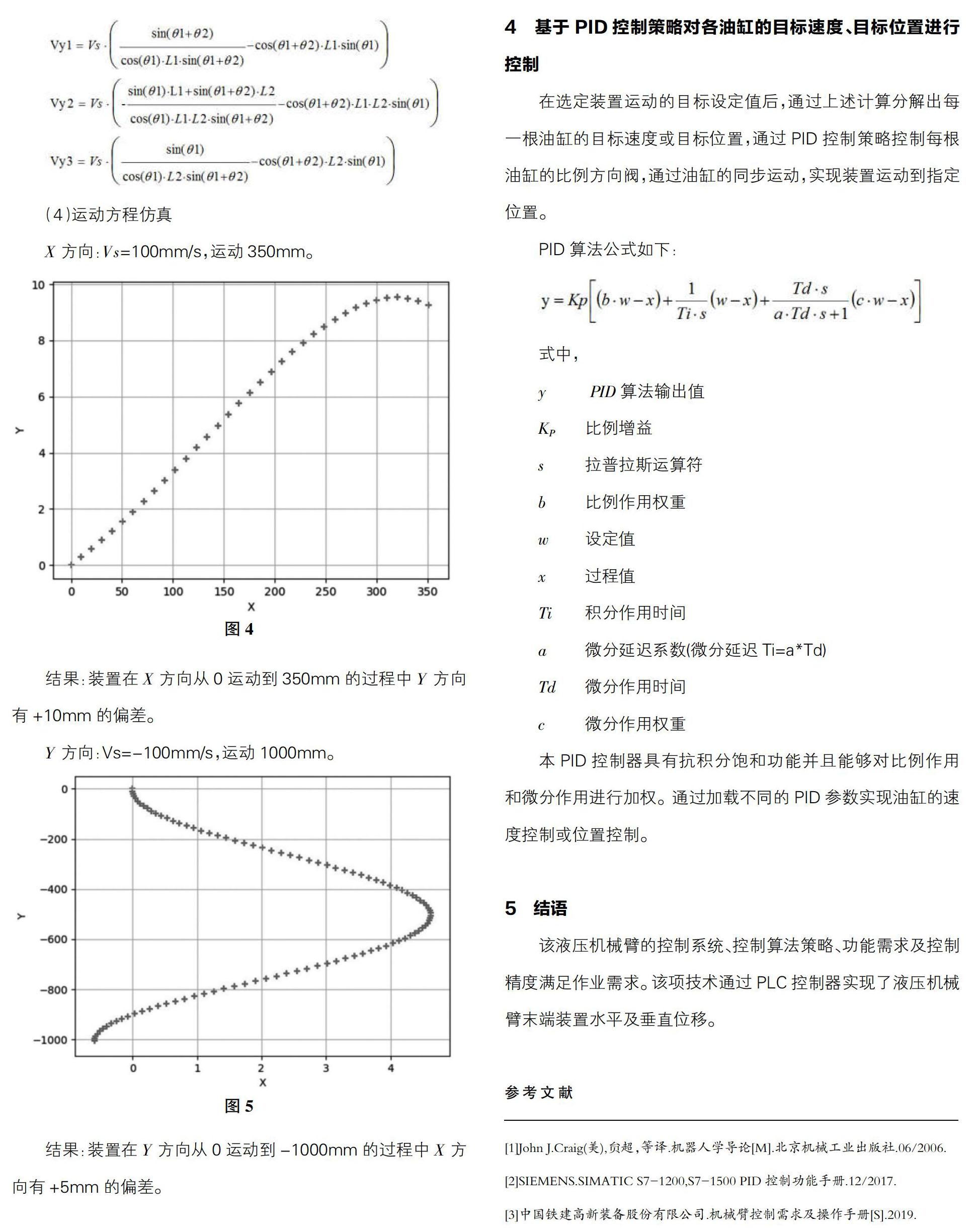
機(jī)械臂可簡化為圖3所示:基準(zhǔn)坐標(biāo)系(x0,y0),運動坐標(biāo)系(xp,yp)。機(jī)械連桿長度L1、L2、L3,連桿關(guān)節(jié)角θ(關(guān)節(jié)角順時針為負(fù)逆時針為正)。
機(jī)械臂正運動學(xué):正運動學(xué)描述械臂末端位置和姿態(tài)跟各關(guān)節(jié)變量在坐標(biāo)系中的幾何函數(shù)關(guān)系。
機(jī)械臂逆運動學(xué):給定機(jī)械臂末端位置和姿態(tài),通過逆運動學(xué)可以計算所以可達(dá)給定位置和姿態(tài)的關(guān)節(jié)角。
本PID控制器具有抗積分飽和功能并且能夠?qū)Ρ壤饔煤臀⒎肿饔眠M(jìn)行加權(quán)。通過加載不同的PID參數(shù)實現(xiàn)油缸的速度控制或位置控制。
5 結(jié)語
該液壓機(jī)械臂的控制系統(tǒng)、控制算法策略、功能需求及控制精度滿足作業(yè)需求。該項技術(shù)通過PLC控制器實現(xiàn)了液壓機(jī)械臂末端裝置水平及垂直位移。
參考文獻(xiàn)
[1]John J.Craig(美),贠超,等譯.機(jī)器人學(xué)導(dǎo)論[M].北京機(jī)械工業(yè)出版社.06/2006.
[2]SIEMENS.SIMATIC S7-1200,S7-1500 PID控制功能手冊.12/2017.
[3]中國鐵建高新裝備股份有限公司.機(jī)械臂控制需求及操作手冊[S].2019.
猜你喜歡
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
電腦報(2020年35期)2020-09-17 13:25:53
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
