基于VPI與模型預測電壓相結合的電流跟蹤控制策略研究
2020-07-30 14:04:34褚紅旭彭沖趙明
科技視界 2020年19期
褚紅旭 彭沖 趙明

摘 要
四橋臂有源電力濾波器(Active Power Filter,APF)電流跟蹤控制以矢量控制居多,該控制方式一般都是通過控制器與調制算法相結合來實現的。電流跟蹤性能的好壞主要受到控制器的影響。矢量比例積分(Vector proportional integral,VPI)控制器是比例諧振(Proportional Resonance,PR)控制器的改進,能有效提高電流補償效果。而模型預測控制也在各個領域得到了廣泛應用,包括在電力電子領域等。將兩種控制策略結合在一起,使得系統在穩態時利用VPI矢量控制方式,在動態時切換至模型預測電壓控制方式,充分發揮兩種控制策略各自的優勢。
關鍵詞
四橋臂有源電力濾波器;VPI控制器;模型預測電壓控制
中圖分類號: TM761? ? ? ?文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.19.032
Abstract
The current tracking control of four-leg APF is mostly based on vector control,which is usually realized by the combination of controller and modulation algorithm.The performance of current tracking is mainly affected by the controller.VPI controller is an improvement of PR controller,which can effectively improve the current compensation effect.Model predictive control has been widely used in various fields, including power electronics. The combination of the two control strategies makes the system use of VPI vector control in the steady state, switch to model predictive voltage control in the dynamic state,and give full play to the advantages of the two control strategies.
Key Words
Four-leg APF;VPI controller;Model predictive voltage
我國城鎮低壓配電網以三相四線制結構為主,其線電壓等級為380V[1],大量的小功率電器設備在這一電壓等級下使用,這些電器中含有的非線性元件,成了產生諧波的主力軍[2],此外這些電器設備大都單相接入電網,當電網用電規劃不合理時,低壓配電網中會存在大量諧波及三相不平衡電流[3-4],給電力系統造成巨大的威脅。因此,針對三相四線制網絡進行濾除諧波和不平衡電流的有源濾波設備具有很強的研究意義及應用價值[5]。
為應對電網穩態與暫態狀態下存在的不同諧波,將兩種控制策略結合在一起,使得系統在穩態時利用VPI矢量控制方式,在動態時切換至模型預測電壓控制方式,充分發揮兩種控制策略各自的優勢。
1 基于VPI與模型預測的復合控制器設計
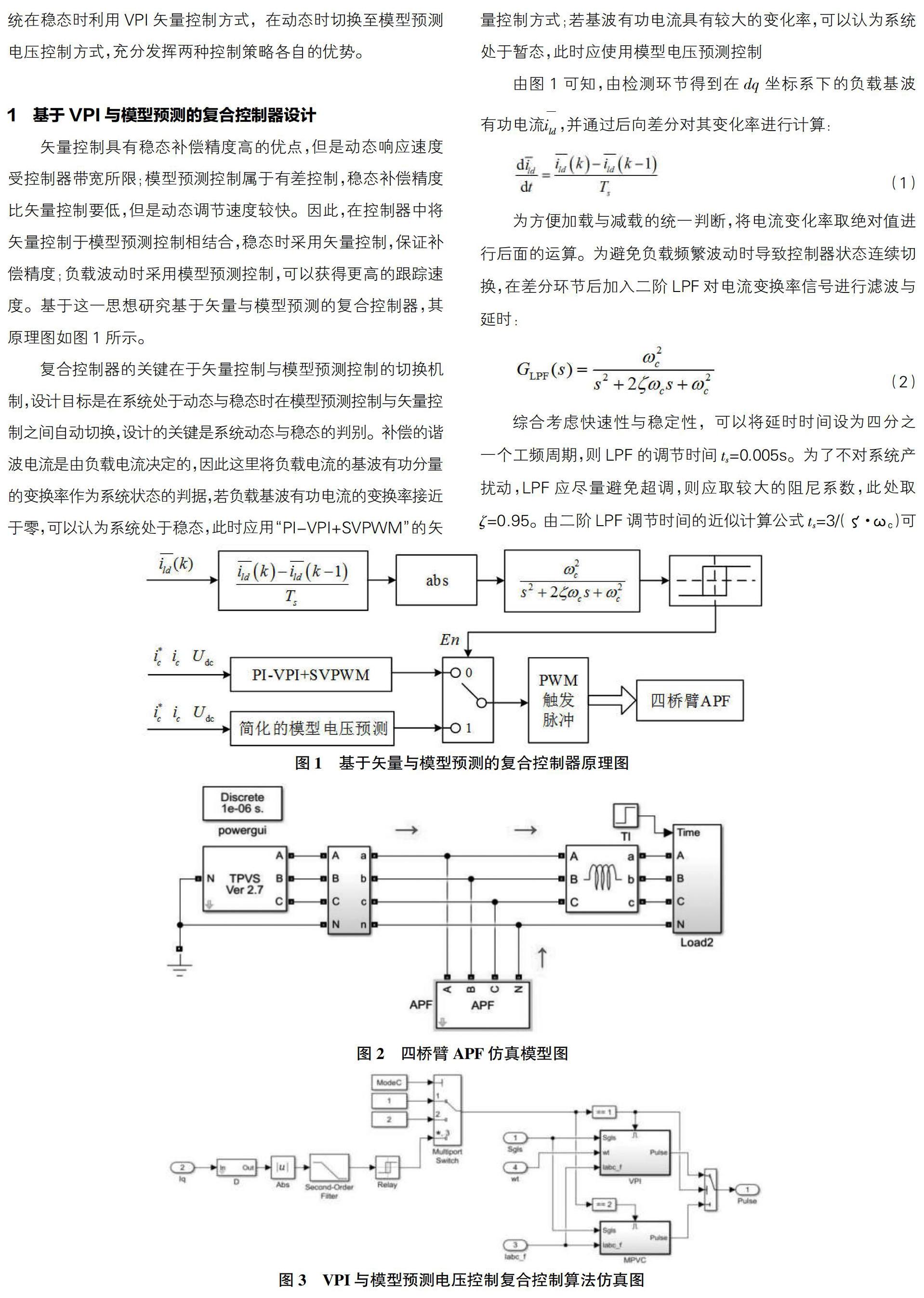
矢量控制具有穩態補償精度高的優點,但是動態響應速度受控制器帶寬所限;模型預測控制屬于有差控制,穩態補償精度比矢量控制要低,但是動態調節速度較快。因此,在控制器中將矢量控制于模型預測控制相結合,穩態時采用矢量控制,保證補償精度;負載波動時采用模型預測控制,可以獲得更高的跟蹤速度。基于這一思想研究基于矢量與模型預測的復合控制器,其原理圖如圖1所示。
復合控制器的關鍵在于矢量控制與模型預測控制的切換機制,設計目標是在系統處于動態與穩態時在模型預測控制與矢量控制之間自動切換,設計的關鍵是系統動態與穩態的判別。補償的諧波電流是由負載電流決定的,因此這里將負載電流的基波有功分量的變換率作為系統狀態的判據,若負載基波有功電流的變換率接近于零,可以認為系統處于穩態,此時應用“PI-VPI+SVPWM”的矢量控制方式;若基波有功電流具有較大的變化率,可以認為系統處于暫態,此時應使用模型電壓預測控制
可以根據實際工況對兩個閾值進行設置,這里取TH+=20與TH=10。En為控制器的選擇信號,當En=0時采用矢量控制,當En=1時采用模型預測控制。
2 仿真設計
為驗證VPI與簡化模型預測電壓控制兩者相結合的復合控制策略的正確性,利用MATLAB軟件搭建了其仿真模型,如圖2所示。圖中“TPVS”為三相電源,可以輸出頻率為50Hz,有效值為110V的三相電源電壓;“APF”代表的是三相四橋臂的主電路,其中主電路直流側的電容電壓設為360V,電容大小為4000F,APF的進線電感為3mH;“Load2”表示的是負載模塊,該模塊為三相不控整流橋帶阻感性負載,其中負載電阻為30Ω,負載電感為0.1mH,交流側連接電感為3mH,在中性線與A相間接入電阻為30Ω;同時為驗證所研究控制策略的動態響應性能,設置在0.16s時突變負載,負載電阻為30Ω。
圖3是VPI與模型預測電壓控制復合控制算法仿真圖,當在穩態運行時,系統電流跟蹤控制策略采用的是VPI控制方法,而檢測到負載發生變化時,并且變化超過所設定的閾值,則立刻切換為簡化的模型電壓預測控制策略,這樣在電流跟蹤過程就充分地發揮了各自的優勢。
3 仿真分析
圖4表示的是在兩種控制策略相結合的復合控制方法下的補償后的網側電流波形,從圖中可以看出,穩態時采用的VPI控制,網側電流波形較為光滑,毛刺少,在動態時采用的簡化的模型預測電壓控制策略,響應能力強,很快達到穩態,再次切換為VPI控制,這充分的把兩種控制策略的優點給結合在一起,從而也說明本文研究這種復合控制策略的正確性與合理性。圖5是直流側電壓的控制波形,可以看出在超調很小,而且快速達到給定電壓值,并且在負載波動時也能較快的恢復到穩態,說明直流側電容電壓得到了較好的控制。
4 結論
針對VPI控制器與模塊預測控制器的不足,將兩者進行結合,給出了穩態與暫態的判斷規則,根據仿真結果可以證明,該種復合方法能夠在穩態時采用VPI控制,網側電流波形較為光滑,毛刺少,在動態時采用模型預測電壓控制策略,響應能力強,很快達到穩態,再次切換為VPI控制,達到最佳治理效果。
參考文獻
[1]中華人民共和國國家標準GB/T 14549-1993.電能質量[S].北京:中國標準出版社,1993.
[2]蔡儒軍.三相四橋臂有源電力濾波器控制策略研究[D].徐州:中國礦業大學, 2016.
[3]馬立新,王曉丹,王月曉,等.APF特定次諧波智能檢測方法的研究[J].控制工程, 2013,20(2): 352-356.
[4]吳鏡野,王少杰,趙乘麟.并聯型有源濾波器新型控制策略[J].電子技術與軟件工程,2019, 1(23):223-224.
[5]鄭宏,張云,王哲禹,等.基于改進比例諧振控制的三相四橋臂有源電力濾波器究[J].電子器件,2017,40(1):237-243.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學與工程(2015年4期)2015-09-26 11:59:03
