基于改進遺傳算法的機械臂時間最優(yōu)軌跡規(guī)劃
2020-07-26 14:19:51曾關平王直杰
科技創(chuàng)新與應用 2020年22期
關鍵詞:機械臂
曾關平 王直杰

摘? 要:機械臂的時間最優(yōu)軌跡規(guī)劃是指機械臂的末端關節(jié)在從初始位置到給定位置過程中,所花時間最短的軌跡規(guī)劃。文章以七自由度機械臂為研究對象,在用三次多項式規(guī)劃出機械臂運動軌跡的前提下,擬采用改進遺傳算法的方法,用浮點編碼和設計適應度函數(shù),生成滿足約束條件的初始種群,然后不斷迭代直到滿足算法終止條件為止,對機械臂的運動軌跡進行時間上的優(yōu)化,通過將機械臂在全局尋優(yōu)的方法,找到時間最短的方案。
關鍵詞:機械臂;軌跡規(guī)劃;時間最優(yōu);改進遺傳算法
中圖分類號:TP242? ? ? ? ?文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)22-0006-04
Abstract: The time-optimal trajectory planning of the robotic arm refers to the trajectory planning that takes the shortest time from the initial position of the robotic arm to the given position. In this paper, a seven-degree-of-freedom manipulator is taken as the research object. On the premise of using three cubic polynomials to plan the trajectory of the manipulator, the method of improved genetic algorithm is used to generate the initial population that meets the constraints using floating-point coding and designing the fitness function Then, iterate continuously until the termination condition of the algorithm is satisfied, and optimize the time of the trajectory of the manipulator. By searching the manipulator in the global optimization method, the solution with the shortest time is found.
Keywords: manipulator; trajectory planning; time-optimal; improved genetic algorithm
引言
近年來,隨著機器人技術的快速發(fā)展,針對機器人展開了各項技術研究。其中,針對機械臂軌跡規(guī)劃的研究主要從關節(jié)空間軌跡規(guī)劃和笛卡爾空間軌跡規(guī)劃兩種方面進行展開,而無論采用哪種規(guī)劃方法所規(guī)劃出來的軌跡,不管是從時間還是能耗以及關節(jié)沖擊上都不是最優(yōu)的,因此這就需要我們對規(guī)劃好的軌跡進行優(yōu)化找出一條最優(yōu)的軌跡。隨著企業(yè)對于生產(chǎn)效率要求的普遍提高,這就要求機械臂沿著規(guī)劃的軌跡運行的同時還要求其運行的軌跡平滑連續(xù)。
為了更充分地利用機械臂動力性能,需要在保證機械臂約束的前提下對機械臂的運動軌跡進行優(yōu)化。就目前來看,機器人適用的場合不同所優(yōu)化目標也不盡相同,大致分為:運行時間優(yōu)化、耗能優(yōu)化和減沖擊優(yōu)化這三種[1],本文主要針對時間優(yōu)化展開研究。韋素云,徐敏使用雙臂的機器人作為執(zhí)行機構,將神經(jīng)網(wǎng)絡算法應用到了機械臂解耦問題上,取得了良好的效果,很好的避免了復雜軌跡優(yōu)化收斂速度較慢及局部收斂的問題[2]。宮孟孟等人也是用神經(jīng)網(wǎng)絡的方法,來識別障礙物來進行避障,同時也能夠判斷設計出來的運動路線是否會與障礙物發(fā)生碰撞,在一定程度上可以提高計算速率[3]。文獻[4]采用改進的蟻群算法和模糊PID控制算法對時間進行優(yōu)化,很好地保證了時間以及沖擊最優(yōu)。本文采用改進遺傳算法,對機械臂通過固定路徑點進行時間最優(yōu)的軌跡規(guī)劃。
1 三次多項式插值規(guī)劃軌跡
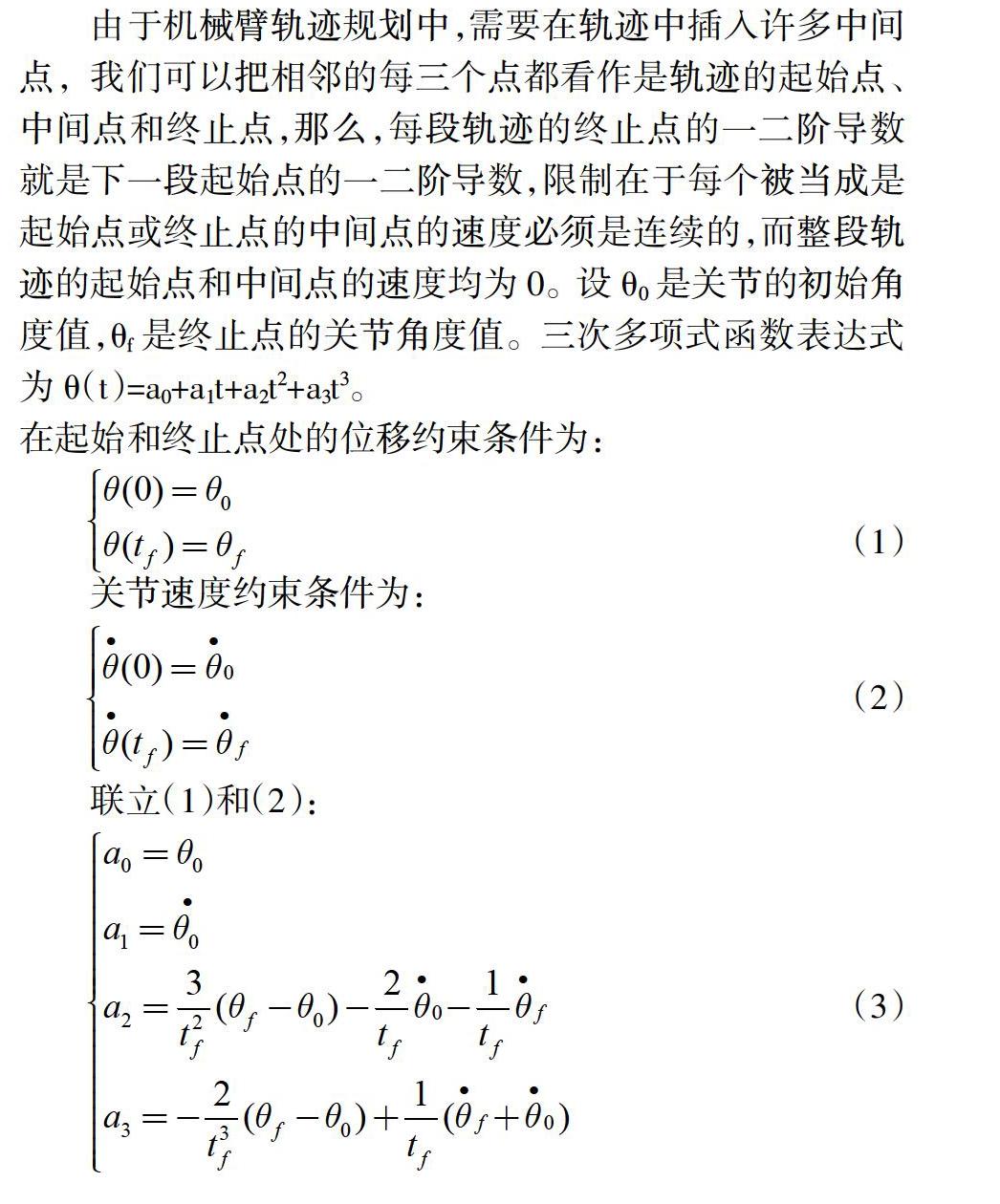
由于機械臂軌跡規(guī)劃中,需要在軌跡中插入許多中間點,我們可以把相鄰的每三個點都看作是軌跡的起始點、中間點和終止點,那么,每段軌跡的終止點的一二階導數(shù)就是下一段起始點的一二階導數(shù),限制在于每個被當成是起始點或終止點的中間點的速度必須是連續(xù)的,而整段軌跡的起始點和中間點的速度均為0。設?茲0是關節(jié)的初始角度值,?茲f是終止點的關節(jié)角度值。三次多項式函數(shù)表達式為?茲(t)=a0+a1t+a2t2+a3t3。
在起始和終止點處的位移約束條件為:
關節(jié)速度約束條件為:
聯(lián)立(1)和(2):
2 改進遺傳算法
2.1 浮點編碼法
在機械臂的關節(jié)軌跡優(yōu)化過程中,很多論文都采用的是傳統(tǒng)的二進制編碼方法,這種方法的好處在于直接簡便,但其缺陷也很明顯。例如,線性函數(shù)在離散化的過程中會產(chǎn)生誤差;編碼方法也對二進制編碼優(yōu)化的準確度有很大影響。為了解決這些問題,選擇了浮點編碼方法,作為一個時間間隔變量,以直接驗證該變量與浮點的匹配性,在一定程度上減少了算法的計算量,從而加強了算法收斂的速度。
2.2 適應度函數(shù)設計
在適應度函數(shù)的設計方面,為了防止算法出現(xiàn)較大的誤差,因此采用罰函數(shù)法,對約束條件中的個體進行篩選,滿足要求的種群后代不會受到懲罰,而不滿足的后代則將會施加懲罰。根據(jù)算法迭代中種群的基因變化情況,調(diào)整罰函數(shù)的約束,使得誤差趨于最小化,算法更加精確。適應度函數(shù)為:
其中,?滓為懲罰系數(shù),取值0.1;P(t)為懲罰項。當關節(jié)的各個參數(shù)值都滿足公式中的約束條件時,這時P(t)的值不發(fā)生變化,相反,如果關節(jié)的參數(shù)超過了設定好的區(qū)域,這時需要加大懲罰來使得參數(shù)滿足約束條件要求。這時,建立的單獨適應度函數(shù)為:
在種群不斷進化篩選的過程中,種群中的優(yōu)良個體數(shù)量也會越來越多,所以,這時就需要調(diào)整獨立的適應度函數(shù),使種群能夠在這些個體中挑選出最接近最優(yōu)解的個體。重新調(diào)整適應度函數(shù):
對上式的適應度重新標定為:
其中,F(xiàn)(t)為調(diào)整過后的適應度的取值;Fit(t)min為初始的適應度函數(shù)值的最小值;Fit(t)max為初始的適應度函數(shù)的最大值;?啄為常系數(shù),取值在0~1之間。
2.3 遺傳算子的改進
(1)選擇
輪盤賭選擇是目前使用的最多的選擇算法,很多的遺傳算法也是如此,但是這種方法在收斂方面不能滿足本文要求。在種群遺傳過程中,會不斷產(chǎn)生新個體,這樣會導致其中的一些本就比較優(yōu)秀的成員因為遺傳而導致基因發(fā)生改變,所以,本文在種群中選擇一些相對比較滿足要求的個體,不再進行交叉,而是直接將基因傳到下一代,即精英保留策略。
(2)交叉和變異
遺傳算法的交叉概率和遺傳概率應當隨著適應度值做出相應的變化,因此對交叉和變異所取概率進行改進,利用正弦函數(shù)對算法交叉算子和變異算子進行改進,使算法交叉概率和變異概率隨著個體適應度值自動調(diào)整并做非線性變化。
改進后的交叉概率Pc和變異概率Pm為:
在這種情況下,各個系數(shù)的取值與自適應遺傳算法的系數(shù)相差不大。與改進前的遺傳算法相比,運用了正弦曲線的方法,使得交叉概率和算法變化概率不再是常數(shù),而是跟隨個體適應性的正反變化。當個體的適應度比較不符合種群進化方向時,提高個體的變異概率;當個體的適應度太高導致種群過早收斂時,降低個體的變異概率。因此,算法根據(jù)實際情況能夠?qū)ψ儺惛怕首龀鱿鄳恼{(diào)整,從而避免算法陷入局部最優(yōu),并確保算法能夠在一定時間內(nèi)完成收斂。
交叉算子的表達式為:
其中,?琢是區(qū)間[0,1]上的任意數(shù)值。
浮點編碼法交叉算子為:
2.4 改進的算法流程
(1)定義種群遺傳過程中的各項參數(shù),同時進行初始化:Pm和Pc分別代表遺傳算法的變異概率和交叉概率;種群的數(shù)量N;迭代的次數(shù)g;機械臂運動的時間段n。
(2)定義算法的約束條件。對算法需要解決的問題,即關節(jié)運動時間總和,施加關節(jié)的角速度和角加速度約束,以免算法得出的解超出了關節(jié)的限制。
(3)初始種群的生成。用隨機數(shù)法生成滿足條件的初始種群N。
(4)對生成的種群進行交叉和變異,根據(jù)基因的交換結(jié)合形成新的個體,其中概率的變化依據(jù)改進后的公式來選擇。
(5)根據(jù)優(yōu)勝劣汰的進化法則,父代通過交叉變異后,將兩代的個體結(jié)合,根據(jù)設定好的條件判斷個體是否優(yōu)良,篩選出優(yōu)良個體,組成新的種群,然后進行下一次遺傳。
(6)每一次遺傳后對種群進行判斷。如果滿足結(jié)束條件,則停止迭代過程,不滿足則繼續(xù)(4)的操作。
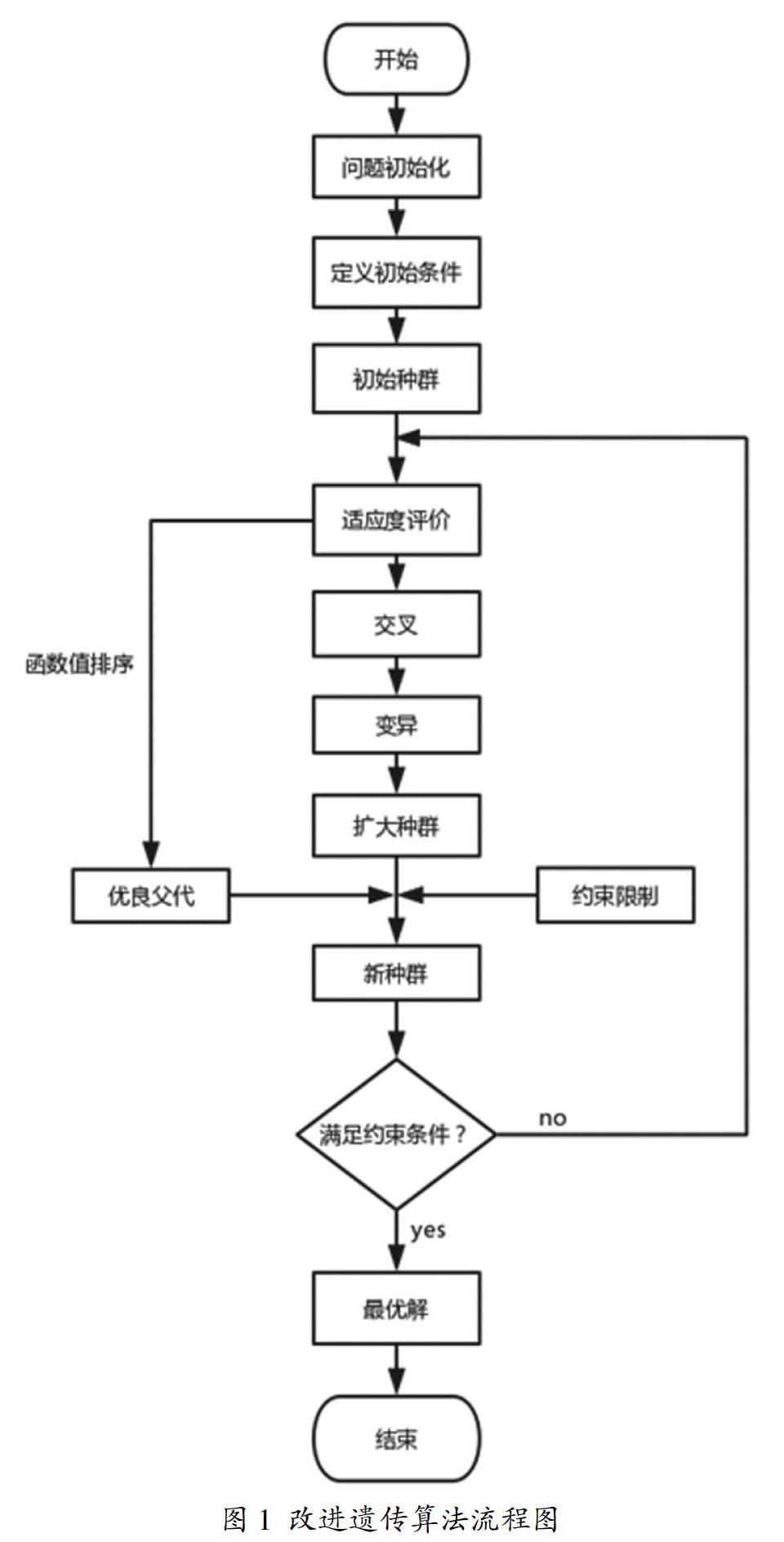
遺傳算法的流程如圖1所示:
標準遺傳算法和改進遺傳算法迭代收斂速度比較(見圖2、3)。
從圖2和圖3可以看出,改進后的算法在30代左右就已經(jīng)開始收斂,而傳統(tǒng)的方法此時還處于變化過程,直到45代左右才開始收斂過程。改進遺傳算法的收斂速度比標準的遺傳算法在收斂速度上更加快速,證明了改進后,算法在時間效率上節(jié)省了很多時間。從這兩個圖也能看出,在時間上,改進后的算法明顯縮短了優(yōu)化的時間,大約節(jié)省了1.2s。
從表1中可以看出,對于每一段關節(jié)間的軌跡,算法都實現(xiàn)了優(yōu)化過程,由于每段軌跡的時間都設置成了4s,所以可以很明顯地看到,優(yōu)化后之間基本控制在2s到4s之間,優(yōu)化后的效果可見一斑。將所有的分段軌跡結(jié)合后,得到的總時間也可以看出,原本的軌跡需要20s的時間才能到達,優(yōu)化后最短只需要13.2s,優(yōu)化了將近33%。
3 結(jié)束語
本文采用七自由度機械臂為研究對象,根據(jù)運動學約束采用了三次多項式的插值算法規(guī)劃路徑,然后采用改進遺傳算法對軌跡進行時間上的優(yōu)化,最終規(guī)劃出了每個關節(jié)的軌跡,且在保證關節(jié)的位移,速度,加速度曲線平滑的條件下縮短了機械臂的運行時間。
參考文獻:
[1]居鶴華,付榮.基于GA時間最優(yōu)機械臂軌規(guī)劃算法[J].控制工程,2012,19(03):472-477.
[2]韋素云,徐敏.雙臂機器人神經(jīng)網(wǎng)絡解耦與路徑規(guī)劃算法研究[J].機械設計與制造,2017(08):245-248.
[3]宮孟孟.基于神經(jīng)網(wǎng)絡的移動機器人路徑規(guī)劃方法研究[D].哈爾濱工業(yè)大學,2017.
[4]王文杰,秦現(xiàn)生.基于jerk最優(yōu)的機械臂軌跡規(guī)劃[J].機械傳動,201746(3):93-125.
[5]牛永康.六自由度串聯(lián)機器人軌跡規(guī)劃時間最優(yōu)研究[D].長春工業(yè)大學,2013.
[6]Yang F, Ding L, Yang C, Yuan X. An algorithm for simulating human arm movement considering the comfort level[J]. Simulation Modelling Practice & Theory, 2005, 13(5):437-449.
[7]Shimizu M, Kakuya H, Yoon W K, Kitagaki K, Kosuge K. Analytical Inverse Kinematic Computation for 7-DOF Redundant Manipulators With Joint Limits and Its Application to Redundancy Resolution[J]. IEEE Transactions on Robotics, 2008, 24(5):1131-1142.
[8]Sciavicco L, Siciliano B. Modeling and Control of Robot Manipulators[J]. Industrial Robot An International Journal, 1996, 21(1):99-100.
猜你喜歡
科技與創(chuàng)新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業(yè)技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯(lián)網(wǎng)技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農(nóng)機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28