低空無人機影像分辨率對冬小麥氮濃度反演的影響
2020-07-24 05:08:22陳鵬飛
農業機械學報 2020年7期
關鍵詞:特征
賈 丹 陳鵬飛
(1.中國科學院地理科學與資源研究所資源與環境信息系統國家重點實驗室, 北京 100101;2.中國科學院大學, 北京 100049; 3.江蘇省地理信息資源開發與利用協同創新中心, 南京 210023)
0 引言
氮素是作物生長發育必不可少的營養元素,對作物的光合能力、同化過程等產生重要作用[1],植株缺氮會同時表現在外部形態和內部代謝,因此可以通過作物的生理生化參數來反映其氮素營養狀況。遙感技術可用于反演作物的生理生化參數,進而可對其進行氮素營養診斷[2-4]。目前,常用的遙感技術包括衛星遙感、載人機遙感、無人機遙感和地基遙感[5-6]。相對于其他遙感平臺,無人機遙感具有成本低[7]、能獲取高空間分辨率影像、適合田塊尺度觀測等優勢[8],是精準農業管理中的重要技術手段[9]。
目前,已有不少基于無人機遙感進行作物氮素營養診斷的研究。文獻[10]基于無人機遙感建立氮營養指數,對冬小麥進行氮素診斷;文獻[11]基于無人機高光譜影像,通過構建診斷氮素的光譜指數反演了水稻葉片氮濃度信息;文獻[12]結合無人機高光譜影像和氮素輻射傳輸模型,采用查找表的方法估算了冬小麥的冠層氮濃度。這些研究很好地推動了無人機技術在作物氮素營養診斷中的應用,但也存在一定的缺陷:僅利用影像的光譜信息進行作物參數反演忽略了低空無人機影像具有超高空間分辨率的特征,超高分辨率的影像不但含有光譜信息,還有豐富的紋理信息。紋理特征作為作物的固有屬性,不易受到外界影響,反映圖像灰度性質及其空間關系,擴大了原始影像亮度的空間信息辨識度,能夠在一定程度上解決光譜信息反演存在的飽和問題,提升參數的反演精度[13-14]。目前,結合光譜和紋理信息進行作物氮素營養診斷的研究報道較少。文獻[15]比較了無人機影像光譜特征、紋理特征、光譜特征+紋理特征等3種不同情景對冬小麥生物量反演精度的影響,結果表明,光譜特征+紋理特征的精度優于單一紋理特征,單一紋理特征的精度又優于單一光譜特征;文獻[16]研究表明,影像光譜特征+紋理特征對棉花植株氮濃度的反演精度要遠優于單一光譜特征的反演。但是,影像紋理特征非常依賴于影像分辨率,上述文獻并未探討這種紋理特征究竟在何種分辨率下有效。目前,已有研究的無人機飛行高度為8~550 m[17-19](多集中于100 m以下),對應影像分辨率為1~20 cm,對無人機飛行高度及對應影像分辨率的選擇上存在一定的隨意性,缺乏統一標準規范指導,給基于無人機的作物參數反演模型技術的推廣帶來困難[9]。因此,探討不同分辨率影像對作物氮素營養診斷效果的影響,對于制定標準化影像獲取規范具有重要意義。
本文通過設計冬小麥水、氮耦合試驗,在獲取不同氮素營養狀態下小麥植株的基礎上,探討不同分辨率無人機影像光譜特征與紋理特征變化對冬小麥植株氮濃度反演的影響,為無人機遙感氮素營養診斷、飛行高度與影像分辨率的選擇提供理論依據,以支撐相關標準化技術規程的制定。
1 材料與方法
1.1 田間試驗
田間試驗為水、氮耦合試驗,布設于中國科學院禹城農業綜合試驗站內(東經116°34′13″,北緯36°50′0″)。小麥品種為“維麥8號”,試驗設計2個水分處理,5個氮肥處理。2個水分處理為裂區分布,每個水分處理下設不同氮肥處理。氮肥處理為5處理,3重復,呈隨機分布。各處理與重復的空間分布見圖1,共32個小區,小區尺寸為10 m×5 m。其中,水分處理分別為90 mm灌溉量和60 mm灌溉量;氮肥處理分別為不施肥(T1)、15 000 kg/hm2廄肥(T2)、15 000 kg/hm2廄肥+100 kg/hm2氮肥(T3)、15 000 kg/hm2廄肥+200 kg/hm2氮肥(T4)、15 000 kg/hm2廄肥+300 kg/hm2氮肥(T5)。各小區除水、氮外,其他處理措施相同。
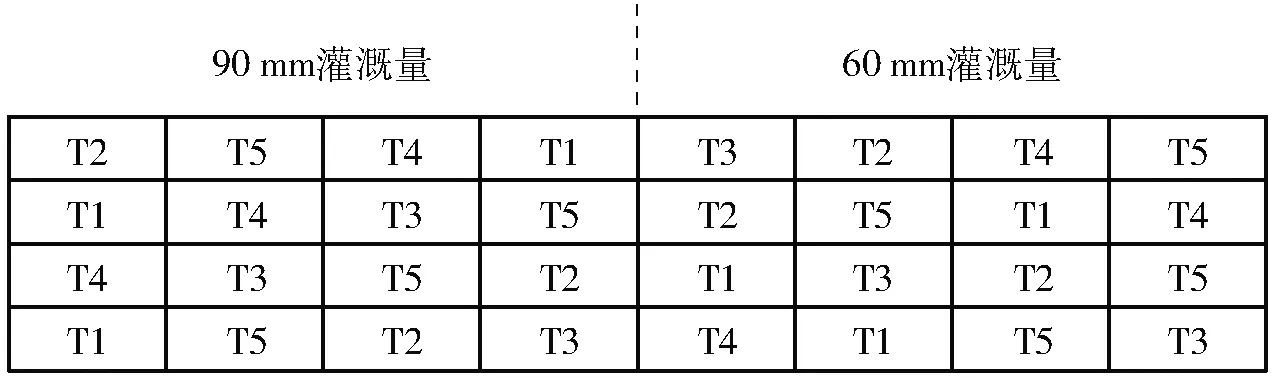
圖1 小區布設空間分布圖Fig.1 Layout of field experiment
1.2 數據獲取
在冬小麥的灌漿期進行數據采集,包括無人機數據和地面農學參數。
1.2.1無人機數據獲取
無人機影像基于3DR Solo型四旋翼無人機(3DR,美國),搭載RedEdge M型多光譜傳感器(MicaSense,美國)獲得。RedEdge M型多光譜傳感器包含有藍光波段(中心波長475 nm)、綠光波段(中心波長560 nm)、紅光波段(中心波長668 nm)、紅邊波段(中心波長717 nm)和近紅外波段(中心波長840 nm)等 5個波段信息。無人機飛行時間為12:00—14:00,天空晴朗無云時進行。設置4個飛行高度,分別為15、30、50、80 m,對應地面分辨率約為1.00、2.06、3.49、5.69 cm。飛行時,航向和旁向重疊率設為75%。相機先采用觸發拍攝模式,在飛行前拍攝白板,然后再設定為自動拍攝模式,用于在無人機飛行過程中進行拍攝。Pix4D ag(Pix4D,瑞士)軟件用來進行無人機影像拼接。在此過程中,白板信息被用來將影像DN值轉換為反射率。另外,基于厘米級誤差的Trimble GEO 7X型(美國)差分GPS采集的高精度地面樣點數據對影像做幾何精校正。本研究所使用無人機及獲取的1景影像如圖2所示。
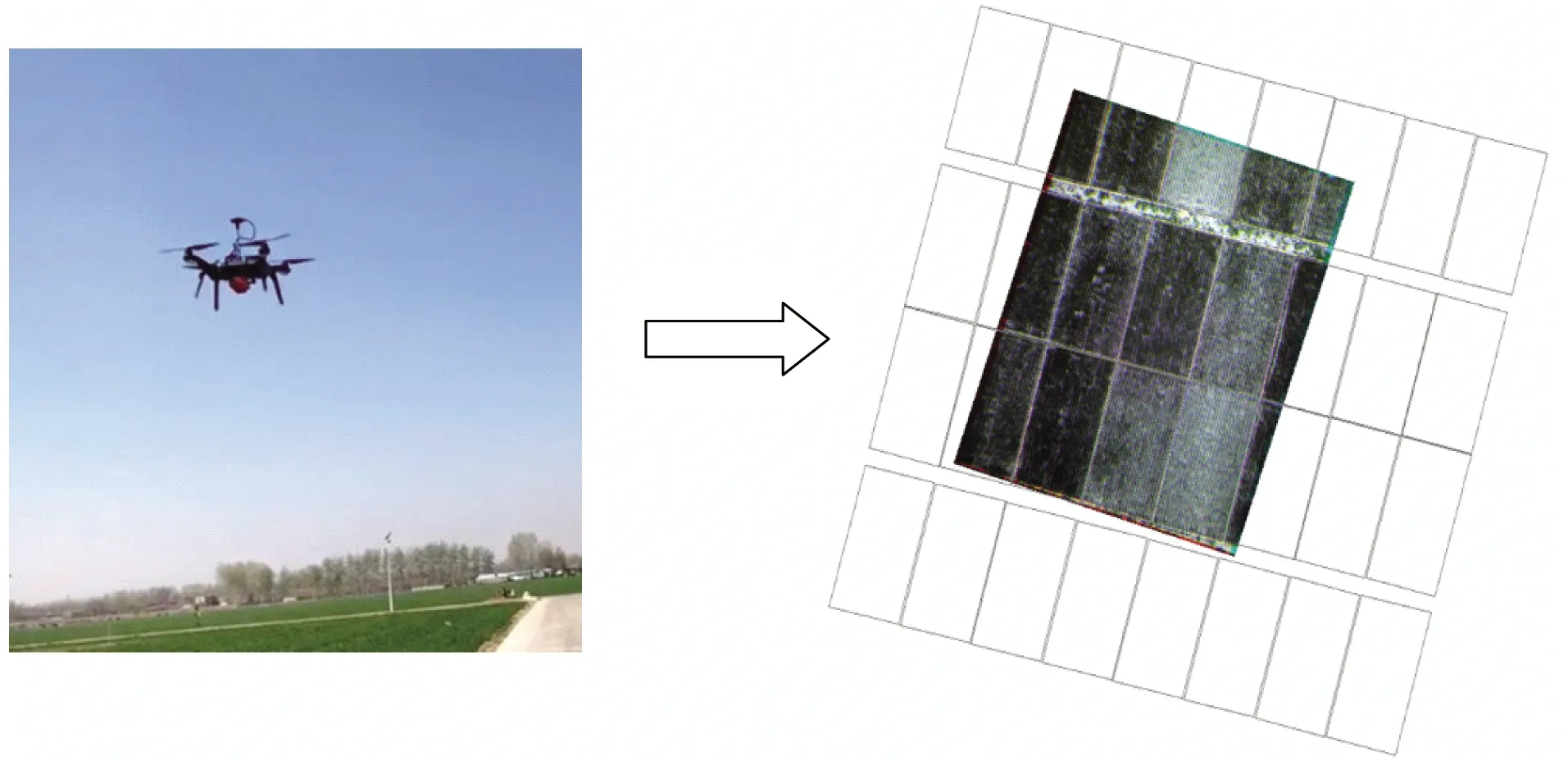
圖2 無人機平臺及獲取的1景影像(飛行高度30 m, 空間分辨率2.06 cm)Fig.2 UAV platform and an acquired image(flight altitude was 30 m, spatial resolution was 2.06 cm)
1.2.2地面農學參數獲取
在每個小區,選擇長勢較均勻區域作為采樣區。首先,在采樣區中心區域,齊地割取4行40 cm的小麥植株,剪去根,莖、葉分離后放入干燥箱干燥至恒質量;然后,稱取各部分干質量,并將干莖、葉分別粉碎,利用vario micro cube型元素分析儀(Elementer,德國),采用Dumas燃燒法測定其含氮量;最后,根據各部分干質量,換算為植株氮濃度(%)。
1.3 數據分析方法
首先,利用歸一化差值植被指數(Normalized difference vegetation index,NDVI),采用決策樹分類,提取不同分辨率影像下的小麥信息,以去除土壤背景;然后,基于剔除土壤背景后的影像,提取冬小麥植株的光譜信息和紋理特征信息;最后,以4個飛行高度作為不同情景,探討不同情景下光譜信息、紋理特征、光譜信息+紋理特征等反演植株氮濃度的效果。其中,光譜反射率提取自各小區所有像元的平均光譜,然后基于光譜反射率,計算以歸一化植被指數為構型的各光譜指數NDVIs[20]:比值植被指數RVI[21]、增強植被指數EVI[22]、三角植被指數TVI[23]、土壤調整植被指數OSAVI[24]、修改三角植被指數MTVI2[25]、紅邊模型R-M[26]、綠波段比值植被指數RVIgreen[27]等,上述植被指數作為影像光譜信息;紋理特征通過研究灰度的空間相關特性來定量分析[28],本研究使用的紋理特征參數包含從灰度共生矩陣計算的均值、方差、同質性、對比度和能量值[29],5個光譜波段共有25個參數;主成分回歸分析法是遙感反演植被參數時常用的建模方法[30],本研究應用它來建立植株氮濃度的反演模型。建模時,將獲得的冬小麥32個樣本隨機分為兩組。1組包含24個樣本作為建模樣本;另一組包含8個樣本作為檢驗樣本。各情景下的建模,依賴于相同的建模樣本和檢驗樣本。在構建主成分反演植株氮濃度模型時,選擇特征值大于1的信息的前n個主成分變量來建立模型[31],用預測決定系數(Coefficient of determination,R2)、預測標準誤差(Root mean square error,RMSE)和相對預測標準誤差來評價模型的精度。
2 結果與分析
2.1 不同分辨率下光譜信息對小麥植株氮濃度反演的影響
不同分辨率下光譜信息對小麥植株氮濃度反演的結果如表1所示。從表中可以看出,在分辨率1.00~5.69 cm之間,光譜信息反演植株氮濃度的效果未表現出趨勢性變化,彼此間的差異也不大。建模時,R2在0.633 1~0.655 9之間變化,RMSE在0.153 9%~0.154 2%之間變化;驗證時,R2在0.774 1~0.814 0之間變化,RMSE在0.136 5%~0.136 9%之間變化。說明影像在此分辨率之間變化時,所帶來的光譜信息變化對植株氮濃度反演影響不顯著。
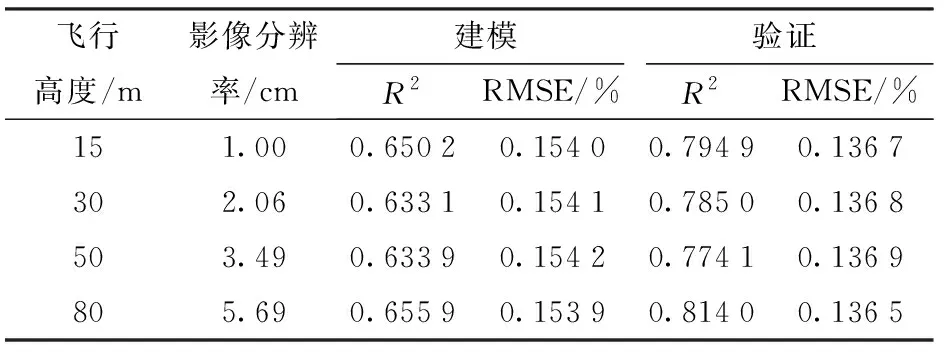
表1 基于不同分辨率影像光譜信息對小麥植株氮濃度的反演結果Tab.1 Prediction results of plant nitrogen concentration based on spectral information from different resolution images
2.2 不同分辨率下紋理特征對小麥植株氮濃度反演的影響
不同分辨率下紋理特征對小麥植株氮濃度反演的結果如表2所示。從表中可以看出,在分辨率1.00~5.69 cm之間,紋理特征建模效果呈下降趨勢,R2從0.684 0遞減到0.646 9,RMSE從0.139 5%遞增到0.143 9%;模型驗證效果同樣呈現出下降趨勢,R2從0.849 7遞減到0.796 5,RMSE從0.127 4%遞增到0.158 4%。以上結果表明,影像分辨率在1.00~5.59 cm之間變化時,隨著飛行高度的增加,紋理特征在逐步消失,對植株氮濃度的反演效果在不斷變差。所有測試分辨率中,飛行高度為15 m對應空間分辨率為1.00 cm時,模型的反演效果最佳。
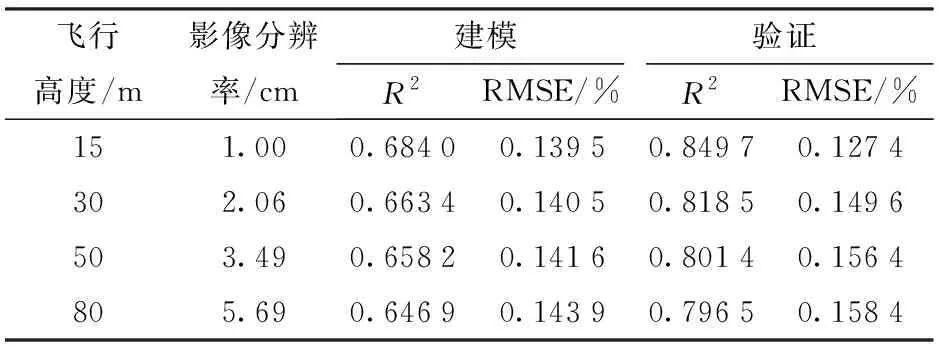
表2 基于不同分辨率影像紋理特征對植株氮濃度的反演結果Tab.2 Prediction results of plant nitrogen concentration based on texture feature from different resolution images
2.3 不同分辨率下光譜信息+紋理特征對小麥植株氮濃度反演的影響
不同分辨率下光譜信息+紋理特征對植株氮濃度反演的結果如表3所示。從表中可以看出,在分辨率1.00~5.69 cm之間,光譜信息+紋理特征建模效果整體上呈下降趨勢,R2從0.788 7遞減到0.675 5,RMSE從0.114 0%遞增到0.141 3%;模型驗證效果與建模效果相同,R2從0.876 1遞減到0.802 3,RMSE從0.138 2%遞增到0.156 1%。飛行高度為15 m、空間分辨率在1.00 cm時,模型的反演效果最佳。另外,與單一光譜信息、紋理特征建模結果相比,光譜信息+紋理特征構建的模型在建模和驗證時的整體精度有所提升。

表3 不同分辨率下光譜信息+紋理特征對植株氮濃度反演結果Tab.3 Prediction results of plant nitrogen concentration based on combining spectral information and texture feature from different resolution images
3 討論
文獻[4]利用無人機搭載多光譜相機獲取冬小麥冠層多光譜影像,基于植被指數法估測冬小麥生育前期(Feekes 4~7)植株氮濃度的R2為0.56,估測其生育后期植株氮濃度的R2為0.78;基于無人機獲取的冬小麥多光譜影像,文獻[10]利用植被指數對小麥植株氮濃度進行反演,模型的R2為0.73;文獻[14]基于人工神經網絡法、多元線性回歸法,利用無人機高光譜影像數據反演小麥葉片氮濃度模型的R2在0.57~0.97,RMSE在0.152%~0.279%;與以上的研究結果相比,本研究的結果在合理范圍之內。
從葉片尺度上來說,植物缺氮表現為葉片邊緣發黃,整片葉子黃綠相間,葉子變黃比例隨植株缺氮程度的增加而增大;從冠層尺度上來說,植物缺氮表現為從下部往上部葉片逐漸表現為缺氮癥狀,因此從上方俯視看冠層,隨著植株缺氮癥狀的加劇,冠層顏色的對比度逐漸加大,這些都屬于紋理特征。灌漿期,冬小麥葉片長度在3.00~10.00 cm。另外,冬小麥播種行距為20.00 cm,因此冠層大小也在此范圍內。據此,理論上只有分辨率優于10 cm的影像才能辨識出這種紋理特征。本研究設計了4種飛行高度場景,對應影像分辨率分別為1.00、2.06、3.49、5.69 cm。在不同場景下,本研究利用光譜信息、紋理特征以及光譜信息+紋理特征分別對冬小麥氮濃度進行反演的結果表明:光譜+紋理模型反演效果優于單一光譜、單一紋理模型反演結果。此結果與文獻[15]利用植被指數反演生物量時得出光譜、紋理融合指標精度高于單一光譜、紋理指標,以及文獻[16]在對棉花植株氮濃度反演時得出光譜+紋理特征反演效果好于單一光譜信息建模效果的相關結論一致。在探究不同飛行高度反演冬小麥氮素營養狀況時,文獻[32]的研究表明,與55 m飛行高度相比,8~16 m飛行高度獲得影像的光譜信息更適合進行小麥莖基部硝酸鹽濃度反演,進而對小麥氮素營養診斷,但未給出對應的影像分辨率。往往不同傳感器在相同高度上其影像分辨率不同,因此其結果很難推廣。與其相比,本研究在設計場景時明確了影像分辨率信息,并且增加了對紋理信息的分析。結果表明在1.00~5.69 cm之間,光譜信息對植株氮濃度反演效果影響不大,但紋理信息會隨著分辨率的變低逐漸變弱,反演效果趨于變差。影像分辨率在1.00 cm時,紋理特征表現最明顯,此時模型反演植株氮濃度效果最好。說明高分辨率影像會帶來豐富的紋理信息,提高植株氮濃度反演精度。但是,獲取高分辨率影像,對于同種傳感器來說就需要采用低的飛行高度,這樣在獲取影像時,效率就會變低。因此,在作物氮素營養診斷時,需要根據實際需求,同時考慮精度要求和效率需求來選擇飛行高度與對應影像分辨率。
本研究只針對灌漿期小麥的植株氮濃度反演開展了相關研究,今后應采集更為廣泛的樣品,對小麥其他生育期的植株氮濃度反演情況進行驗證研究。
4 結束語
基于低空無人機搭載多光譜傳感器,通過設置不同的無人機飛行高度,研究分析了不同分辨率影像對冬小麥植株氮濃度反演的影響。結果表明,影像分辨率在1.00~5.69 cm之間變化時,影像光譜信息對小麥植株氮濃度反演影響不大,各情景下建模結果和驗證結果差異較小;隨著影像分辨率的降低,影像紋理特征對小麥植株氮濃度反演的效果變差;影像光譜信息+紋理特征信息對小麥植株氮濃度反演效果整體隨著分辨率的提高呈增加趨勢,且其反演結果優于于單一光譜特征或單一紋理特征的反演效果。總體而言,影像分辨率在1.00~5.69 cm之間變化時,分辨率越高,紋理特征越豐富,基于紋理特征和光譜信息反演植株氮濃度的效果越好。但在現實中獲取無人機影像進行應用時,還需要綜合考慮無人機影像獲取效率,根據具體需求尋找精度和效率的平衡點。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38