一種基于意圖辨識的無刷直流電機電子制動控制方法
2020-07-23 06:28:29王正家劉穎文淑容孫楚杰何濤
現代電子技術 2020年5期
王正家 劉穎 文淑容 孫楚杰 何濤
摘? 要: 針對無刷直流電機(BLDCM)電子制動方式的制動強度不可控、制動系統作用時間過長等問題,提出一種基于意圖辨識的無刷直流電機電子制動控制方法。基于制動踏板行程及行程變化率設計一個模糊邏輯控制器,建立制動強度與制動意圖的對應關系,并對制動強度進行識別,利用不同的制動意圖選擇最佳的制動方式,再通過制動強度控制制動時的占空比,從而動態調節電機制動力矩,以實現無刷直流電機電子制動的可控性和快速性。應用Matlab/Simulink進行BLDCM制動控制系統仿真模型設計,并得出了不同制動意圖下電機轉速變化的仿真結果。仿真結果表明,所提方法能使制動系統快速響應,并能實現系統制動的可辨識性。
關鍵詞: 無刷直流電機; 意圖辨識; 模糊邏輯控制器; 制動強度; 制動方式; 仿真模型
中圖分類號: TN876?34; TM33? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2020)05?0101?04
An electronic brake control method based on intention identification
for brushless DC motor
WANG Zhengjia1, 2,? LIU Ying1, 2, WEN Shurong3, SUN Chujie1, 2, HE Tao1, 2
(1. School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China;
2. Hubei Key Lab of Modern Manufacture Quality Engineering, Wuhan 430068, China;
3. Hubei Institute of Quality Supervision and Inspection, Ezhou 436070, China)
Abstract: In view of uncontrollable electronic braking strength and too long application time of the braking system of brushless DC motor (BLDCM) electronic braking mode, an electronic brake control method based on intention identification for BLDCM is proposed. In this method, a fuzzy logic controller is designed based on the brake pedal stroke and the stroke change rate to establish the corresponding relationship between the braking strength and the braking intention. Then the braking strength is identified, and the optimal braking mode is selected according to different braking intentions, and then the duty ratio during braking is controlled by the braking strength, thereby the braking torque of the motor is adjusted dynamically to achieve the controllability and rapidity of the electronic braking of the BLDCM. The simulation model of BLDCM brake control system is designed with Matlab/Simulink, and the simulation results of motor speed changes under different braking intentions are obtained. The results show that the proposed method can make the braking system respond quickly and realize the identifiability of the system braking.
Keywords: BLDCM; intention identification; fuzzy logic controller; braking strength; braking mode; simulation model
0? 引? 言
無刷直流電機(BLDCM)由于其無換向器、調速性能好等優點,已在伺服領域以及電動車上得到廣泛的應用。BLDCM在運行過程中,根據運行情況需要減速或制動。常見的制動方式有機械制動和電子制動,其中,電子制動方式包括能耗制動、反接制動和回饋制動[1?2]。機械制動方式簡單可靠,但由于采用了較多的機械傳動機構,導致制動間隙較大、傳動效率降低、響應速度慢、成本高等問題;而電子制動方式解決了以上問題,縮短了制動時間,使BLDCM制動具有更好的性能,并且得到了廣泛的應用。
目前,對于無刷直流電機在電子制動控制方法的研究主要集中在回饋制動[3?4]、反接制動[5?6]以及混合制動[6?7]等方向。回饋制動雖能回收能量至儲能裝置,但其制動轉矩會隨著電機的轉速降低而減小,導致低速時的制動效果不理想;反接制動效果最好,采用脈寬調制的方法雖可以有效地控制制動電流,但制動時需消耗電源功率,且對驅動電路沖擊較大;混合制動是一種將回饋制動和反接制動相結合的方法,該方法既能在高速時回饋能量,又能在低速時保持一定的制動力矩,但這種方法是通過設定一個臨界轉速來切換制動方式的,如果需要緊急制動或者緩慢制動時,此方法很難按照要求實現,制動的可控性比較差。
本文在分析BLDCM電子制動控制方法的基礎上,結合各種制動方式的優勢,提出一種基于意圖辨識的BLDCM電子制動控制方法。該方法是基于制動踏板位移行程及行程變化率,設計了一個模糊邏輯控制器,進行制動強度[8]的識別,并建立制動強度與制動意圖[9]的對應關系,通過制動強度來控制制動時的占空比,從而動態調節電機制動力矩,再利用不同的制動意圖選擇最佳的制動方式,以實現BLDCM電子制動的快速性和可控性。
1? 制動意圖表征分析
1.1? 制動意圖分類
車輛在行駛過程中所處的環境是由駕駛員、車輛和行駛環境組成的一個閉環系統,駕駛員是閉環系統的控制器。制動意圖(BI)是駕駛意圖的一部分,是駕駛員對車輛進行減速操作的一種意圖。根據駕駛員對車輛的操作特性、道路交通條件的變化以及車輛行駛狀態的變化,將制動意圖分為四種[10]:緊急制動、調節制動、持續制動和目標制動。
本文只需要定性地識別出制動的緊急程度,因此,根據駕駛者實際的制動情況,可以將制動行為分為三類:緩慢制動、中等制動和緊急制動。
1.2? 制動意圖與制動強度的關系
一般來說,駕駛者的制動意圖是由駕駛行為實現的,而踩制動踏板是最基本的操作,將此操作參數化后就是制動踏板行程和制動踏板行程變化率,這些參數可以作為BLDCM制動控制系統的輸入。
制動強度是制動效能因素,也就是制動系統的制動能力,其含義是車輛制動時的減速度除以重力加速度。制動強度與制動減速度的函數關系如下:
[z=dg]? (1)
式中:[z]表示制動強度;[d]為制動減速度;[g]為重力加速度,取10 m/s2。
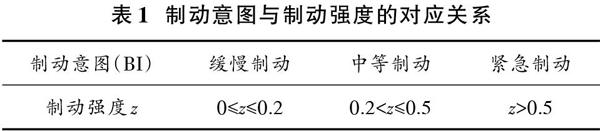
制動意圖辨識,就是通過駕駛員對踏板的動作識別來確定制動強度。駕駛員實現制動時,踏板行程和踏板行程變化率可以在第一時間反映出駕駛員的制動意圖。踏板位移越大,制動強度越大,制動強度主要由踏板位移決定。踏板行程的變化率體現了制動意圖的緊急程度。變化率越大,說明制動的緊急程度越高,相應的制動強度越大;變化率越小,說明制動的緊急程度越低,制動強度就越小。因此,利用踏板位移可以判斷出駕駛員的制動強度需求,從而做到實時、準確地識別駕駛員的制動意圖,制動意圖與制動強度的對應關系如表1所示。
目前關于制動意圖辨識的方法主要有:模糊算法、BP神經網絡算法、雙層隱式馬爾科夫模型等,但大部分采用的是模糊推理方法,因為模糊推理方法不需要精確的數學模型,也不需要大量的測試樣本,且實現簡單。
2? 模糊邏輯制動意圖辨識方法
2.1? 模糊集及論域定義
本文設計的模糊控制器是一個二維結構,把制動踏板行程([F])及踏板行程變化率([Fc])作為輸入變量,制動強度([z])作為輸出變量,對各參數進行模糊化操作,選取“Mamdani”型作為模糊控制系統的推理方法,用重心法進行反模糊化過程。
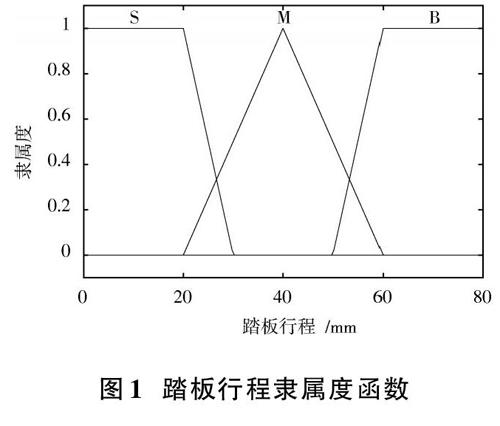
將模糊控制器的輸入變量和輸出變量的模糊子集均設計為3級,子集元素分別為:小(S)、中(M)、大(B)。參照文獻[11]中的制動參數變化范圍,確定參數的論域。輸入變量踏板行程和踏板行程變化率的論域分別為[0,80],[0,200],輸出變量制動強度的論域為[0,1]。踏板行程的隸屬度函數如圖1所示,踏板行程變化率的隸屬度函數如圖2所示,制動強度的隸屬度函數如圖3所示。
2.2? 模糊控制規則的確定
駕駛員不同的制動意圖對應著不同的制動強度,制動強度是制動效能因素,也就是制動系統的制動能力,根據前面選擇的模糊輸入變量和輸出變量,針對制動強度辨識,制定相應的模糊控制規則表,如表2所示。
2.3? 制動意圖辨識仿真
2.3.1? 制動意圖辨識模型
在Matlab/Simulink中建立制動意圖辨識模型,如圖4所示,輸入信號為隨時間變化的踏板行程,另一輸入信號為踏板行程經過微分之后得到的踏板行程變化率,這兩路信號作為模糊控制器的輸入信號,模糊控制器的輸出信號是制動強度。
2.3.2? 制動意圖仿真結果及分析
設置仿真時間為10 s。運行仿真,觀察仿真結果。
踏板行程隨時間變化時制動意圖辨識情況如圖5所示。在示波器中顯示三路信號,從上到下依次為:制動踏板行程信號、踏板行程變化率信號和制動強度信號。
從圖5a)和圖5b)可以看出,隨著踏板行程的增大或減小,踏板行程變化率呈正負交替變化。圖5c)是在不同制動意圖下,制動強度的變化情況。當踏板行程較小且變化率不大時,制動強度較小,制動意圖為緩慢制動;當踏板處于中間附近的位置時,制動強度增大,制動意圖為中等強度制動;當踏板接近最大行程時,制動強度最大,此時制動意圖為緊急制動。
通過對仿真結果的分析可以看出,利用模糊識別控制方法,在緩慢制動、中等制動、緊急制動三種不同的制動情況下,會由于輸入參數的變化程度不同而輸出不同大小的制動強度。緩慢制動情況下,踏板變化率較小,制動強度會隨著踏板行程的增大而增大;中等制動情況下,踏板行程變化率不大時,制動強度的波動較小;緊急制動情況下,制動強度由踏板行程和行程變化率共同決定,踏板行程和踏板變化率均較大,會在短時間內輸出較大的制動強度。總體來說,通過模糊識別方法能夠達到預期的制動意圖辨識的目的。
3? 基于意圖辨識的制動控制方法
3.1? 制動控制方法
本文采用的是基于意圖辨識的制動控制方法,該方法是通過制動踏板行程及行程變化率來辨識駕駛者的制動意圖,建立制動意圖與制動強度的對應關系,再通過制動強度來控制制動時的占空比,從而動態調節電機制動力矩。
由于不同的制動方式決定了系統的制動特性,為了滿足制動系統的快速性且能回收和利用能量,本文采用混合制動方式,并利用不同的制動意圖選擇最佳的制動方式。緊急制動時,采用反接制動方式;緩慢制動和中等制動時,采用回饋制動與反接制動相結合的方式。該制動控制方法既可以使系統制動性能達到最優,又能實時、準確地達到駕駛員制動意圖的目的。
基于意圖辨識的制動控制邏輯框圖如圖6所示。
3.2? 制動控制系統建模及仿真分析
在Matlab/Simulink仿真環境下,建立了基于意圖辨識的BLDCM制動控制系統的仿真模型,如圖7所示[12]。
圖7中BLDCM model為方波型BLDCM,其仿真的具體參數為:定子電阻[r=]0.6 Ω,定子自感[L=]0.021 H,轉動慣量[J=]9×10-6 kg·m2,極對數[P=8],額定轉速[n=]3 000 r/min,電壓[VS=]12 V,采樣周期[T=]5×10-6 s。
圖8是在Matlab/Simulink環境下仿真出的踏板行程曲線,在0~0.3 s過程中,無踏板信號輸出;0.4 s后,踏板信號開始隨著時間的增大而增大,最后穩定在設定的最大值。可以看出,三條曲線對應不同的制動意圖。
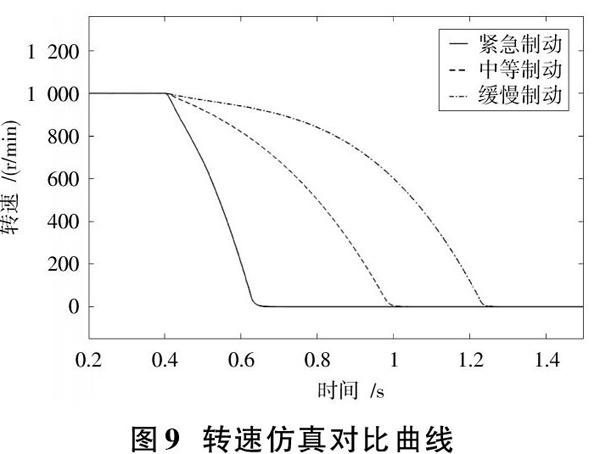
圖9為不同制動意圖下的BLDCM轉速對比曲線。從圖9中可以看出,電機經0.3 s達到設定轉速1 000 r/min;0.4 s后,由踏板輸出制動信號,電機的轉速從1 000 r/min開始減小,直至轉速為零。不同制動意圖下,電機轉速減小的快慢各不相同。緊急制動最快,中等制動次之,緩慢制動所用時間最長,證明了基于意圖識別的BLDCM制動控制方法的有效性。
由此可見,本文提出的基于意圖辨識的BLDCM制動控制駕駛者的制動意圖有效地控制了BLDCM制動強度,并且利用回饋制動和反接制動相結合的方式達到快速制動的效果,使BLDCM的制動具有更好的適應性和可控性。
4? 結? 論
本文針對BLDCM的制動控制方法展開研究,構建了制動踏板意圖辨識模型,可實現根據踏板行程及行程變化率辨識駕駛者制動意圖,確定制動方式和制動強度,繼而快速、合理地控制電機的制動。研究結果表明,本文提出的基于意圖辨識的BLDCM制動控制方法提高了系統制動的快速性和可辨識性。同時,該方法實現簡單,不僅為今后BLDCM制動及其控制策略的研究提供了新的方法,且在一定程度上縮短了開發周期,具有良好的應用價值。
參考文獻
[1] 李發海,王巖.電機及拖動基礎[M].北京:清華大學出版社,2012.
[2] 張琛.直流無刷電機原理及應用[M].北京:機械工業出版社,2004.
[3] 渠彥彥,顏鋼鋒.電動汽車制動與能量回饋技術研究[J].電子技術應用,2013,39(5):61?64.
[4] 宋哲.新型電動車用無刷直流電機回饋制動控制技術[J].電機與控制應用,2015,42(12):79?84.
[5] 胡慶波,鄭繼文,呂征宇.混合動力中無刷直流電機反接制動PWM調制方式的研究[J].中國電機工程學報,2007,27(30):87?91.
[6] 邢立成,韓豐陽,趙敏.電動車用直流無刷電機電氣制動方法研究[J].山西大同大學學報(自然科學版),2012,28(2):67?68.
[7] 王強,王明渝,范杰.電動叉車用無刷直流電機混合制動的研究[J].電力電子技術,2007,41(8):70?72.
[8] 謝文科,嚴世榕.基于舒適性的電動汽車再生制動[J].系統仿真技術,2018,14(1):14?19.
[9] 趙軒,馬建,汪貴平.基于制動駕駛意圖辨識的純電動客車復合制動控制策略[J].交通運輸工程學報,2014,14(4):64?75.
[10] 劉劍開,張向文.電動汽車再生制動過程制動踏板位移與制動意圖及制動強度之間的關系[J].科學技術與工程,2018,18(12):317?325.
[11] 孫惠萍.線控制動踏板裝置研究[D].重慶:重慶大學,2014.
[12] 劉金琨.先進PID控制Matlab仿真[M].4版.北京:電子工業出版社,2016:299?301.
