一類剛柔協作混聯機器人機構的繩索數量和位置分布研究
2020-07-21 10:50:36張俊寶侯紅娟崔國華
工程設計學報 2020年3期
張俊寶,侯紅娟,崔國華,2,劉 健
(1.河北工程大學機械與裝備工程學院,河北邯鄲056038;2.上海工程技術大學智能機器人研發中心,上海201620;3.復旦大學工程與應用技術研究院,上海200433)
隨著拋光、打磨工藝自動化水平的不斷提高,并、混聯機器人機構廣泛應用于拋光、打磨等工藝,其中3UPS-UP機器人機構應用較為廣泛,許多專家學者都對該機構進行了研究。例如:天津大學的王友漁對3UPS-UP機器人機構的剛度進行了解析建模分析[1];北京工業大學的卿建喜、李劍鋒等對冗余驅動Tricept并聯機構進行了驅動優化和奇異性分析[2-3];天津大學的王玉茹等對Tricept并聯機器人的運動學理論進行了論述[4];河北工程大學的劉健對剛柔協作攪拌摩擦焊機器人機構進行了設計與性能研究[5]。筆者擬基于3CD-3UPS-UP剛柔協作混聯機器人機構,通過改變其繩索的數量及位置分布,得到3種不同的剛柔協作混聯機器人機構,并對它們進行運動學分析,求取量綱統一速度雅克比矩陣;同時,分析3種剛柔協作混聯機器人機構在不同工作高度下的各項性能指標并進行對比。
1 剛柔協作混聯機器人機構的運動學模型
剛柔協作混聯機器人機構由3UPS-UP剛性部分和繩索部分組成。如圖1所示,Ai(i=1,2,3)表示剛性部分動平臺的鉸點,Bi(i=1,2,3)表示剛性部分定平臺的鉸點,Cj/Dj/Ej(j=1,2,3/j=1,2,3,4/j=1,2,3,4,5)表示繩索部分定平臺的鉸點,其中剛性部分動、定平臺的鉸點呈正三角形分布,繩索部分定平臺的鉸點呈正三角形、正方形、正五邊形分布。分別以剛柔協作混聯機器人機構各平臺的幾何中心為原點構建基坐標系O-x′y′z′、局部坐標系A-uvw和全局坐標系B-xyz。將拋光、打磨設備放置在剛柔協作混聯機器人機構動平臺幾何中心A處。
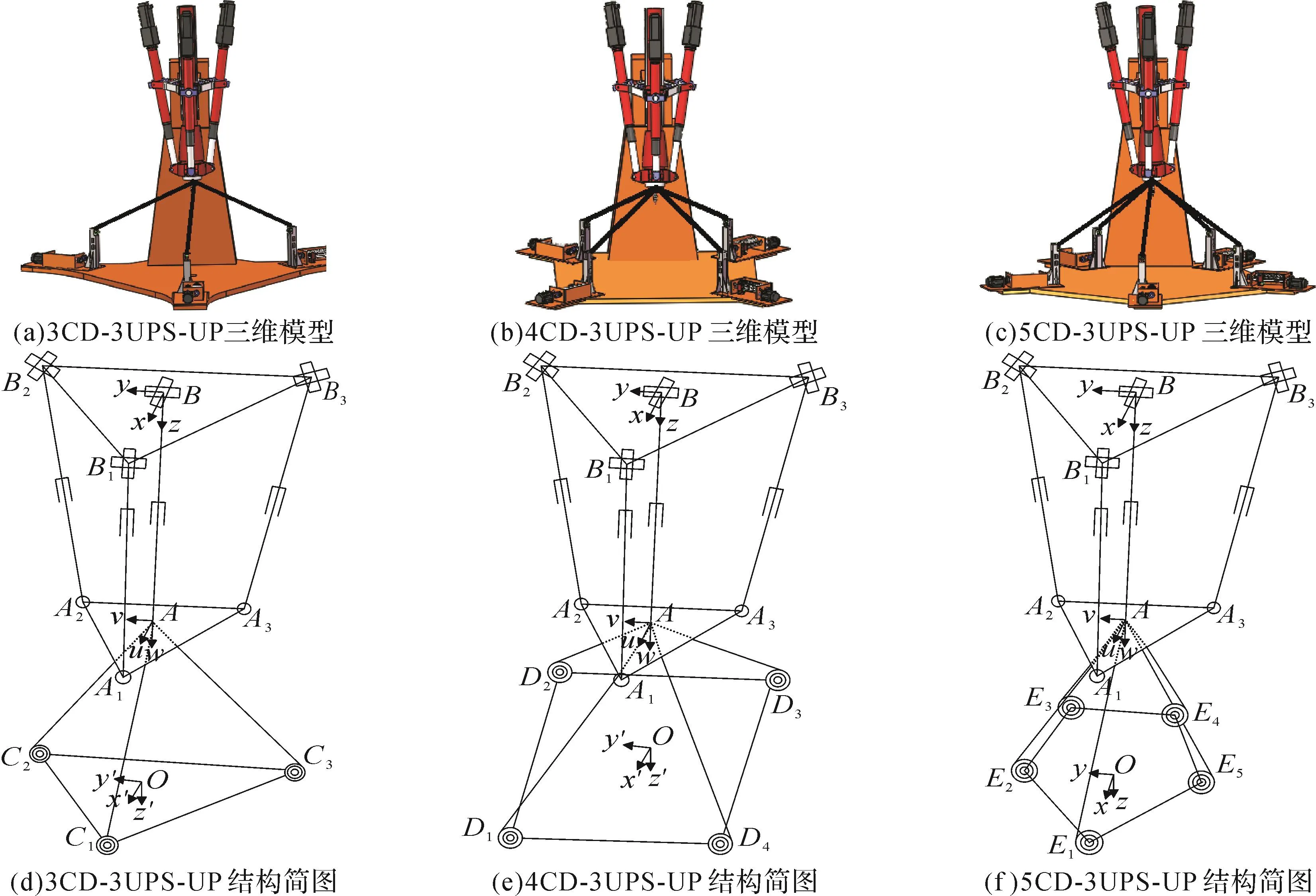
圖1 3種剛柔協作混聯機器人機構的模型Fig.1 Models of three kinds of rigid-flexible cooperative hybrid robot mechanisms
2 剛柔協作混聯機器人機構的位置逆解
2.1 剛性部分的位置逆解
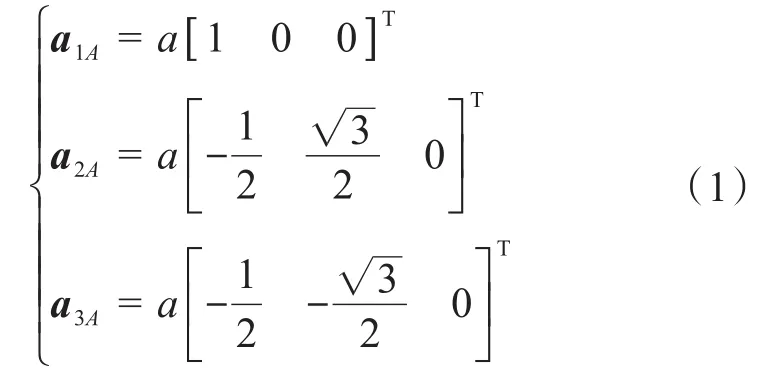
令△B1B2B3和△A1A2A3的外接圓半徑分別為b和a,則鉸點Ai在局部坐標系A-uvw下的位置矢量為:
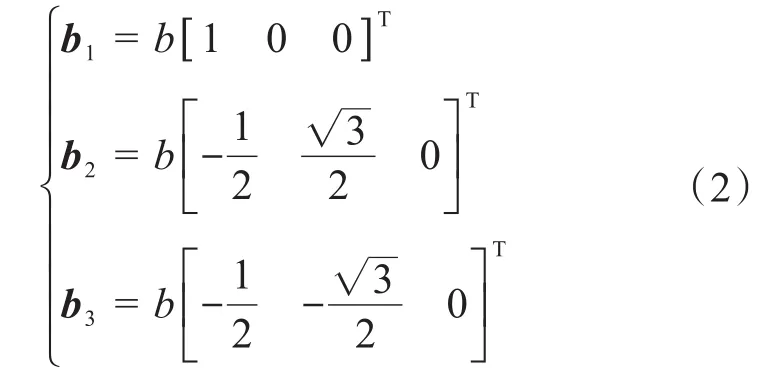
鉸點Bi在全局坐標系B-xyz下的位置矢量為:
設局部坐標系A-uvw到全局坐標系B-xyz的旋轉矩陣為R,則鉸點Ai在全局坐標系B-xyz下的位置矢量ai=RaiA。令點A在全局坐標系B-xyz下的位置矢量r=[xyz]T,根據封閉矢量法[6-7]可得3UPS-UP剛性部分的閉環矢量方程為:

式中:qi——支鏈i的長度;
qi——支鏈i的單位方向向量。
由此可得3UPS-UP剛性部分的位置逆解為:
2.2 繩索部分的位置逆解
令3種剛柔協作混聯機器人機構繩索部分定平臺的外接圓半徑為n,則鉸點Cj/Dj/Ej在基坐標系O-x'y'z'下的位置矢量分別為:
令點A在基坐標系O-x′y′z′下的位置矢量分別為:
根據封閉矢量法,可得繩索數量分別為3,4,5時繩索部分的閉環矢量方程為:

式中:l3j、l4j、l5j——繩索數量分別為3,4,5時繩索j的長度;
u3j、u4j、u5j——繩索數量分別為3,4,5時繩索j的單位方向向量。
由此可得繩索數量分別為3,4,5時繩索部分的位置逆解為:
3 剛柔協作混聯機器人機構的量綱統一速度雅可比矩陣
剛柔協作混聯機器人機構可拆分為3UPS、UP支鏈及繩索三部分,分別求各部分的速度雅可比矩陣,進而求得其量綱統一速度雅可比矩陣。為方便表示,此節的公式中用s表示sin,用c表示cos。
3.1 速度雅克比矩陣求解
3.1.1 3UPS的速度雅可比矩陣
對式(3)求導[8]可得:

式中:w——動平臺的角速度;
v——點A的線速度;
wqi——支鏈i的角速度;
vqi——支鏈i的移動副的移動速度。

式(14)的矩陣形式為:
式中:Jq——3UPS的速度雅可比矩陣。
3.1.2 UP支鏈的速度雅可比矩陣
構建UP支鏈的D-H坐標系,如圖2所示。UP支鏈的結構參數如表1所示,表中:θg為連桿關節角度,dg為連桿偏距,φg為連桿長度,αg為連桿轉角。可將UP支鏈中的虎克鉸U看成2個轉動副R,則UP支鏈可看作R-R-P鏈,θ1和θ2為2個轉動副R的轉角,d3為移動副P的位移。
UP支鏈各連桿坐標系之間的變換矩陣為:
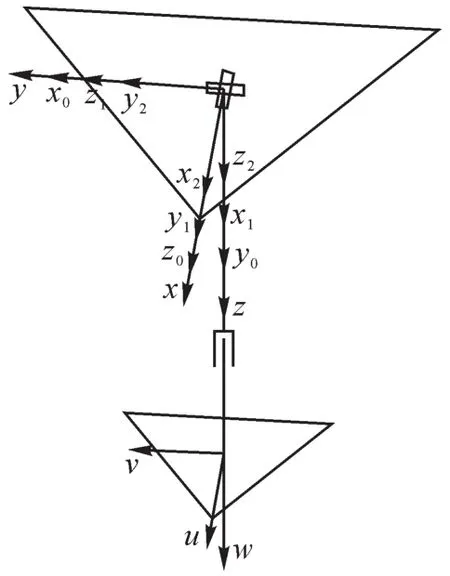
圖2 UP支鏈的D-H坐標系Fig.2 D-H coordinate system of UP branch chain
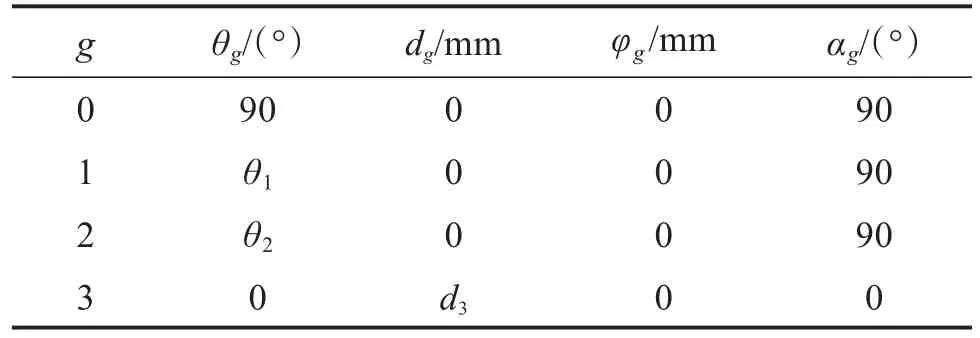
表1 UP支鏈的結構參數Table 1 Structure parameters of UP branch chain
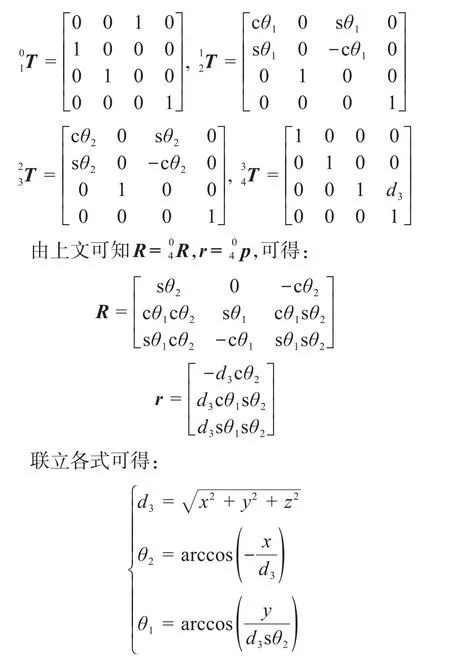
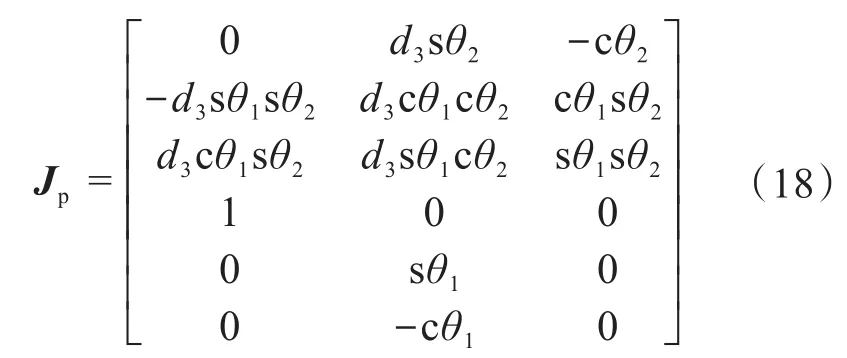
由于關節0不轉動,由微分變換法[9]得UP支鏈的速度雅克比矩陣為:
3.1.3 繩索部分的速度雅可比矩陣
對式(10)求導,可得繩索數量為3,4,5時點A的線速度分別為:
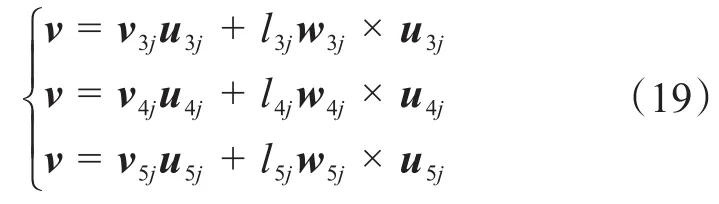
式中:v3j、v4j、v5j——繩索數量分別為3,4,5時繩索j的伸縮速度;
w3j、w4j、w5j——繩索數量分別為3,4,5時繩索j的角速度。
聯立各式可得:
式中:Jr3、Jr4、Jr5——繩索數量為3,4,5時繩索部分的速度雅可比矩陣。
3.2 量綱統一速度雅可比矩陣求解
3.2.1 剛性部分的量綱統一速度雅克比矩陣
令Jp的前3行為Jp1,則可得:

基于式(18)的后3行,同理可得:
聯立式(22)和式(23)可得:
聯立式(15)、式(16)和式(24)可得剛柔協作混聯機器人機構剛性部分的量綱統一速度雅克比矩陣為:

3.2.2 機構的量綱統一速度雅克比矩陣
設T為基坐標系O-x'y'z'到全局坐標系B-xyz的旋轉矩陣,令:

式中:Jgr3、Jgr4、Jgr5——繩索數量為3,4,5時剛柔協作混聯機器人機構的量綱統一速度雅可比矩陣。
4 剛柔協作混聯機器人機構的性能分析
4.1 工作空間
剛柔協作混聯機器人機構的工作空間[10-12]受剛性部分支鏈的長度和運動副轉角的約束。剛柔協作混聯機器人機構的結構參數如表2所示,其中:h為2個定平臺之間的距離,qmin為UPS支鏈的最小伸縮長度,r為UPS支鏈最大伸縮長度和最小伸縮長度的比值,β1為虎克鉸的最大轉角,β2為球鉸的最大轉角。
以拋光、打磨設備的放置點A為參考點,通過MATLAB軟件編程計算得到不考慮繩索部分時剛柔協作混聯機器人機構的工作空間,如圖3所示。

表2 剛柔協作混聯機器人機構的結構參數Table 2 Structural parameters of rigid-flexible coopera-tive hybrid robot mechanism
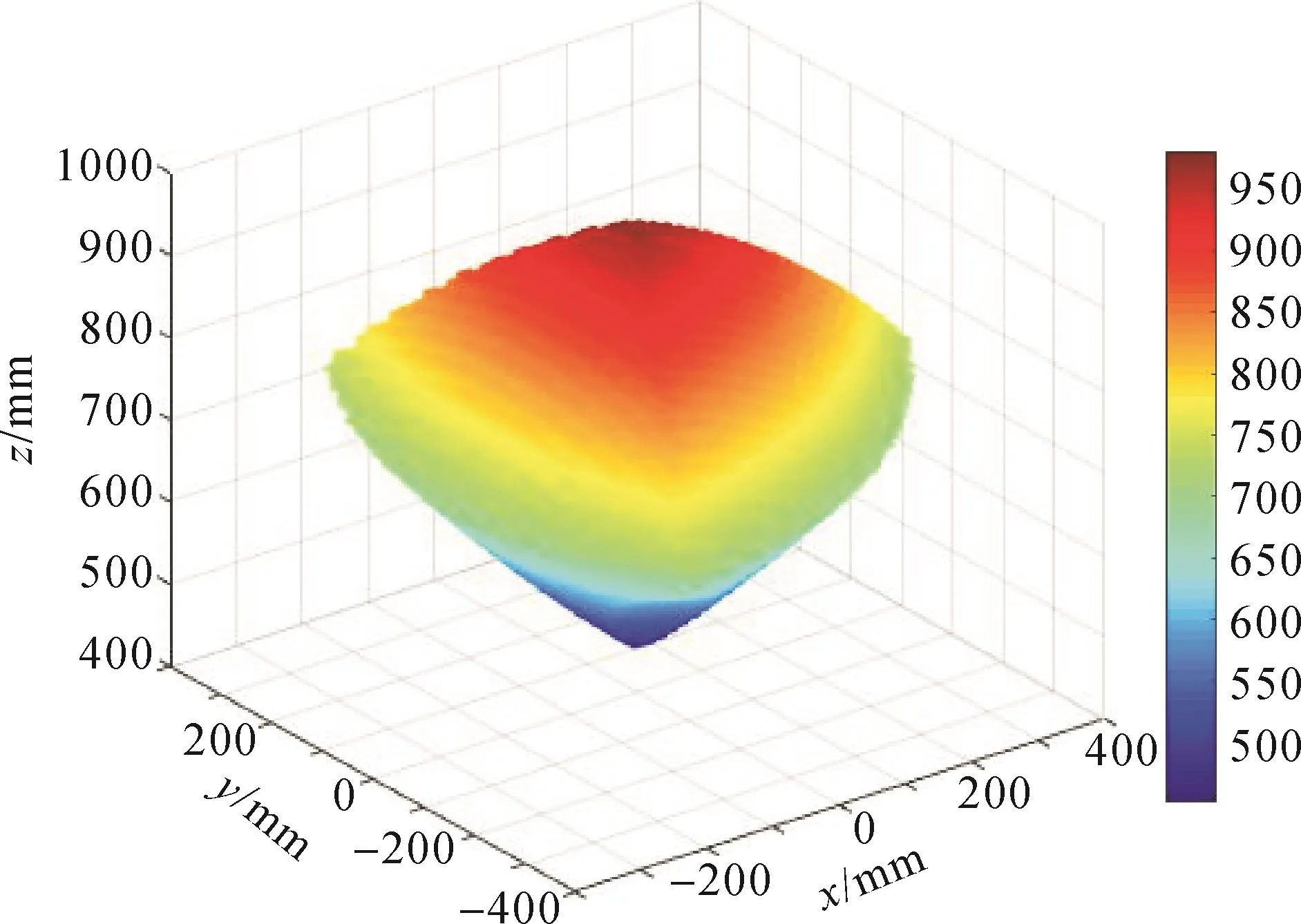
圖3 不考慮繩索部分時剛柔協作混聯機器人機構的工作空間Fig.3 Workspace of rigid-flexible cooperative hybrid robot mechanism without considering rope part
從圖3可以看出,該剛柔協作混聯機器人機構的工作空間連續且沒有空洞,說明在該工作空間內拋光、打磨運動的連續性較好。
4.2 剛 度
通過建立剛度矩陣[13-14]來對剛柔協作混聯機器人機構的剛度進行表征。

式中:J——剛柔協作混聯機器人機構的量綱統一速度雅克比矩陣,即上文的Jgr3、Jgr4和Jgr5;
KJ——剛柔協作混聯機器人機構的剛度矩陣,KJ=diag[q1q2…qm],其中qm為第m個驅動副的關節剛度。
以剛度矩陣的對角線數值之和LSI為剛柔協作混聯機器人機構的剛度指標:LSI越大表明該機構在工作時抵抗變形的能力越強,精度越高。設剛柔協作混聯機器人機構剛性部分的剛度Gg=1000N/mm,繩索部分的剛度Gr=500N/mm,通過計算得到不同剛柔協作混聯機器人機構(繩索的數量和位置分布不同)的剛度,如圖4所示。
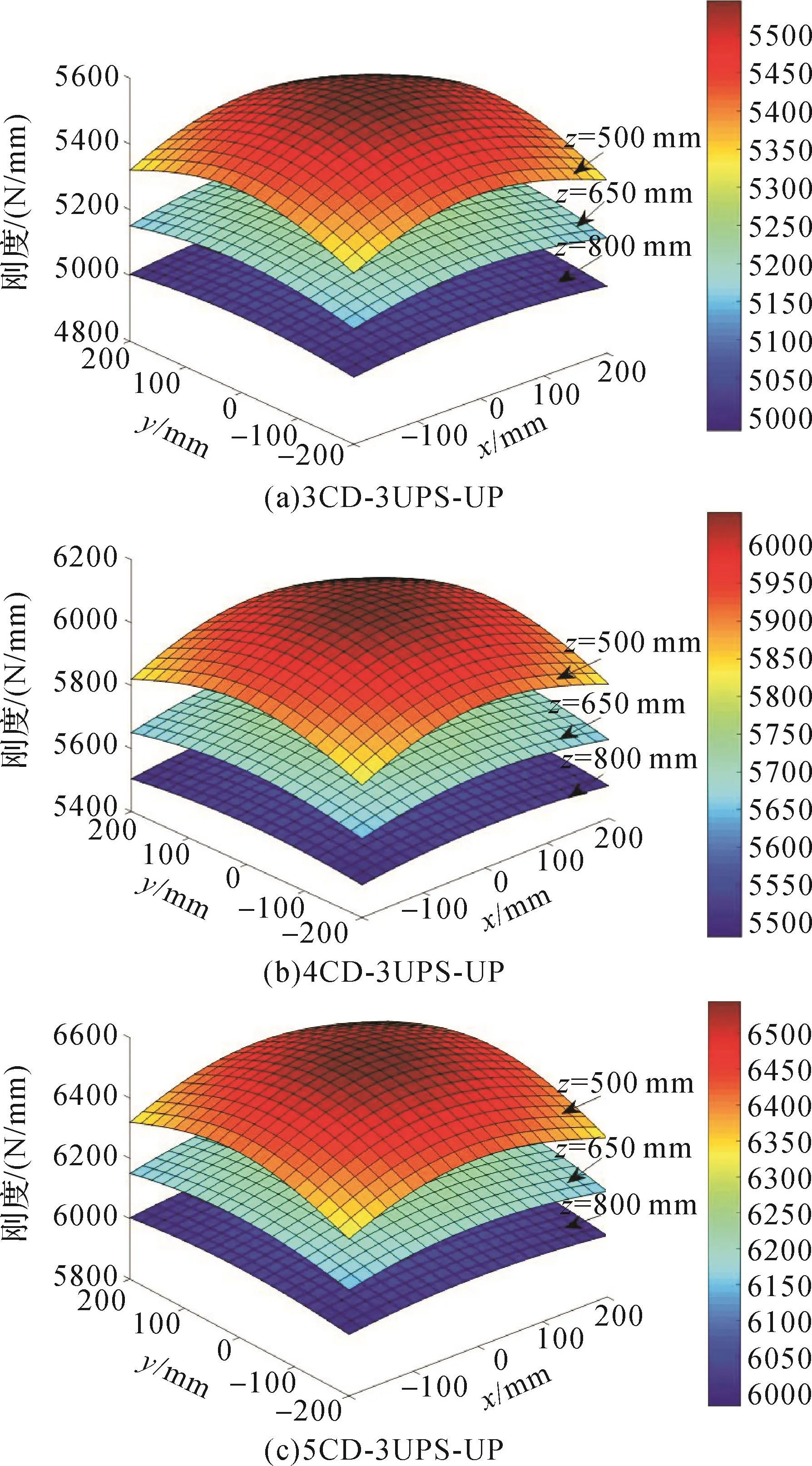
圖4 不同剛柔協作混聯機器人機構的剛度對比Fig.4 Comparison of stiffness of different rigid-flexible co-operative hybrid robot mechanisms
由圖4可知:不同剛柔協作混聯機器人機構的剛度均隨工作高度z的增大而減小;不同工作高度z下,不同剛柔協作混聯機器人機構的最大剛度均在x=0 mm,y=0 mm處出現,最小剛度均在機構所能到達的邊緣處出現;隨著繩索數量的增加,剛柔協作混聯機器人機構的剛度有所增大,更適用于拋光、打磨等工藝。
4.3 全域剛度
剛柔協作混聯機器人機構的全域剛度可表示為[15-16]:
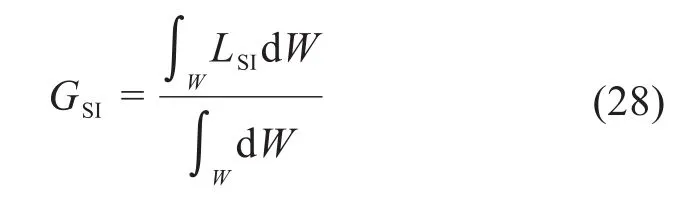
式中:W——剛柔協作混聯機器人機構的工作空間。
通過計算可知,3CD-3UPS-UP的全域剛度GSI3=5127.2,4CD-3UPS-UP 的全域剛度GSI4=5627.2,5CD-3UPS-UP的全域剛度GSI5=6127.2。對比可知:繩索的數量和位置分布不同時剛柔協作混聯機器人機構的全域剛度不同;隨著繩索數量的增加,剛柔協作混聯機器人機構的全域剛度增大,更適用于拋光、打磨等工藝。
4.4 靈巧性
將量綱統一速度雅克比矩陣條件數的倒數作為靈巧性的度量[17-20],即靈巧度,可表示為:
式中:k(J)——量綱統一速度雅克比矩陣的條件數。
力雅克比矩陣與量綱統一速度雅克比矩陣之間的關系為:
式中:G——力雅克比矩陣。
則有:
式中:σ(J)——量綱統一速度雅克比矩陣的奇異值;
σ(G)——力雅克比矩陣的奇異值。
靈巧度越接近1表明剛柔協作混聯機器人機構的運動傳遞性能越佳。不同剛柔協作混聯機器人機構的靈巧度如圖5所示。
由圖5可知:不同剛柔協作混聯機器人機構的靈巧度均隨工作高度z的增大而減小;不同工作高度z下,不同剛柔協作混聯機器人機構的最大靈巧度均在x=0 mm,y=0 mm處出現,最小靈巧度均在機構所能到達的邊緣處出現;隨著繩索數量的增加,剛柔協作混聯機器人機構在x=0 mm,y=0 mm附近的靈巧度稍有減小,其余部分靈巧度有所增大。
4.5 全域靈巧性
剛柔協作混聯機器人機構的全域靈巧度可表示為[21]:
通過計算可得,3CD-3UPS-UP的全域靈巧度GCI3=0.7117,4CD-3UPS-UP的全域靈巧度GCI4=0.7722,5CD-3UPS-UP的全域靈巧度GCI5=0.8001。對比可知:繩索的數量和位置分布不同時剛柔協作混聯機器人機構的全域靈巧性不同;隨著繩索數量的增加,剛柔協作混聯機器人機構的全域靈巧性增強,更適用于拋光、打磨等工藝。
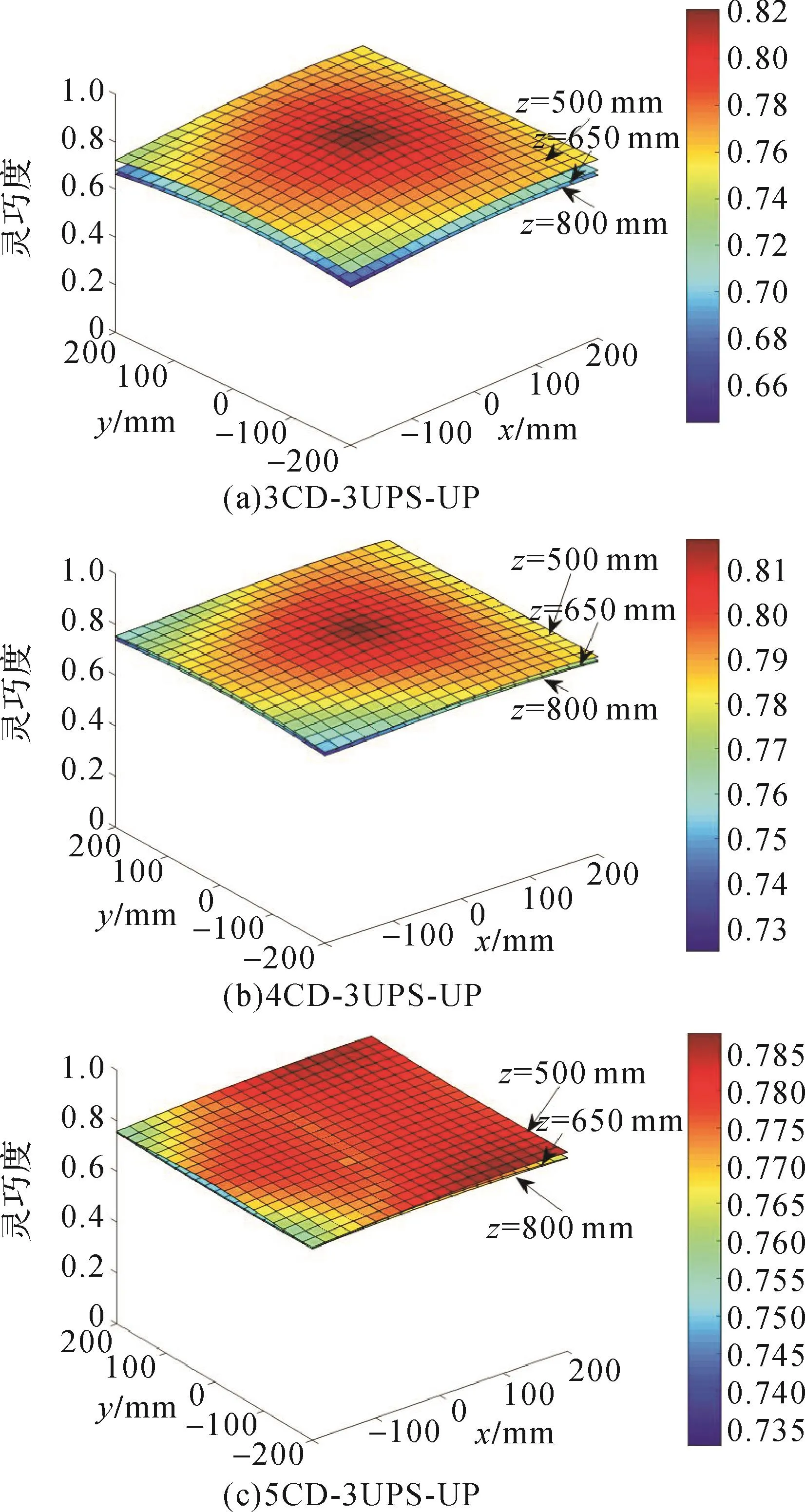
圖5 不同剛柔協作混聯機器人機構的靈巧度對比Fig.5 Comparison of dexterity of different rigid-flexible co-operative hybrid robot mechanisms
4.6 考慮靈巧性的工作空間
為實現剛柔協作混聯機器人機構的靈活運動,需考慮靈巧性的約束,工作空間內靈巧度大于GCI的點的集合為剛柔協作混聯機器人機構考慮靈巧性的工作空間。不同剛柔協作混聯機器人機構考慮靈巧性的工作空間如圖6所示。
由圖6可知:不同剛柔協作混聯機器人機構考慮靈巧性的工作空間不同;隨著繩索數量的增加,剛柔協作混聯機器人機構考慮靈巧性的工作空間不斷減小,不利于拋光、打磨等工藝。
5 剛柔協作混聯機器人機構繩索選擇
綜合考慮剛柔協作混聯機器人機構的各項性能指標可知,繩索的數量和位置分布不同時,剛柔協作混聯機器人機構的剛度、全域剛度、靈巧性、全域靈巧性以及考慮靈巧性的工作空間是不同的。因此當剛柔協作混聯機器人機構用于拋光、打磨等工藝時,應根據實際工況選擇合適數量的繩索進行布置:當主要工作高度為600 mm左右且對剛度和靈巧性的要求比較低時,使用3根繩索進行布置;當主要工作高度為530 mm左右且對剛度和靈巧性要求不是特別高時,使用4根繩索進行布置;當主要工作高度為490 mm左右且對剛度和靈巧性的要求較高時,使用5根繩索進行布置。
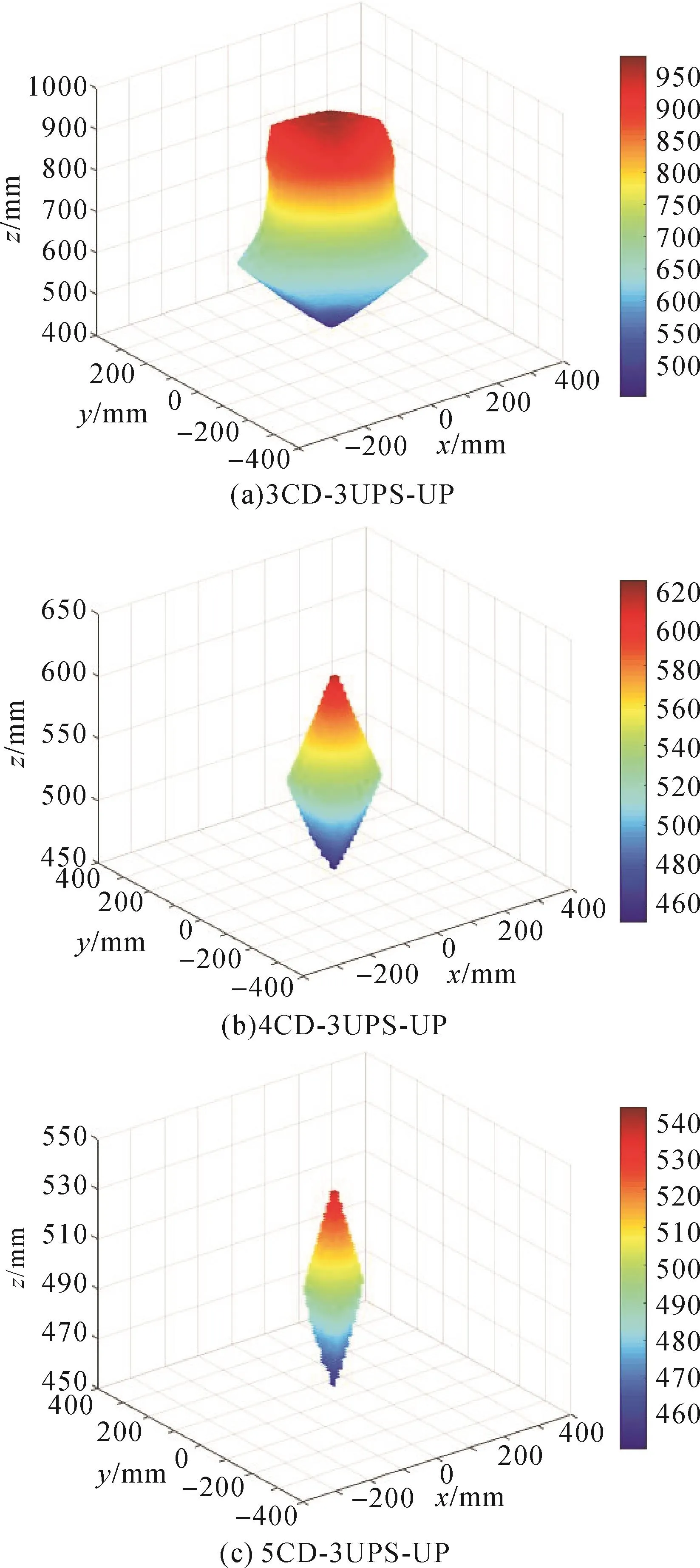
圖6 不同剛柔協作混聯機器人機構考慮靈巧性的工作空間對比Fig.6 Comparison of workspace considering dexterity of dif-ferent rigid-flexible cooperative hybrid robot mecha-nisms
6 結論
針對拋光、打磨等連續接觸式作業的要求,基于剛柔協作混聯機器人機構,開展了如下工作:
1)建立了繩索的數量和位置分布不同的剛柔協作混聯機器人機構的運動學模型,運用對位置逆解求導的方法得到了3UPS和繩索部分的速度雅克比矩陣;建立了UP支鏈的D-H坐標系,運用微分變換法求得UP支鏈的速度雅克比矩陣;求得了不同剛柔協作混聯機器人機構的量綱統一速度雅克比矩陣。
2)根據剛柔協作混聯機器人機構的量綱統一速度雅克比矩陣,通過MATLAB軟件求得了該機構的剛度、全域剛度、靈巧性、全域靈巧性以及考慮靈巧性的工作空間等性能指標。
3)通過對剛柔協作混聯機器人機構各性能指標的對比分析可知,當剛柔協作混聯機器人機構執行對工作高度、剛度及靈巧性的要求不同的拋光、打磨工藝時,應當根據實際工況需求來選擇線索的數量和位置分布。