港口水域使用雷達的局限性及對策
2020-07-20 02:31:42胡曉慧
世界海運 2020年7期
胡曉慧
一、引言
由于港口水域航行環境和海上開闊水域存在明顯差異,雷達設備存在諸多性能限制,因而在港口水域使用雷達應與在海上開闊水域有所區別。本文根據上海港的航行環境和雷達使用情況,就雷達設備的性能限制、圖像調節等方面,探討在港口水域使用雷達時的注意事項,以提醒駕引人員注意因雷達設備的性能限制和復雜航行環境所帶來的風險。
二、在港口水域使用雷達設備的局限性
港口水域內船舶通航密度大,船舶間距離近且機動頻繁。這些會導致雷達難以穩定跟蹤目標,降低目標數據精度。
(一)雷達的目標分辨能力有限制
根據IMO雷達設備性能標準MSC.192(79)的規定,在平靜的海面使用1.5海里或更小的量程,在量程的50%~100%范圍內,兩個點物標的距離分辨力應不低于40米,方位分辨力應不低于2.5度[1]。當目標間距離小于40米或方位差小于2.5度時,雷達可能無法分辨目標,也無法穩定跟蹤目標。這種超出雷達分辨能力的情況,在通航密度大的港口水域較為常見。
圖1是上海港南槽航道進口高峰時拍攝的雷達圖像。圖中出現了嚴重的回波粘連現象。其原因就是船舶密度過大,目標間距離太近,超出了雷達的目標分辨能力。雷達無法分辨這些粘連在一起的目標回波,也無法準確捕獲并穩定跟蹤這些目標。對那些尚可分辨的目標,即使雷達能夠捕獲,在跟蹤的過程中也極易發生目標丟失或交換,難以獲取目標的準確運動數據。
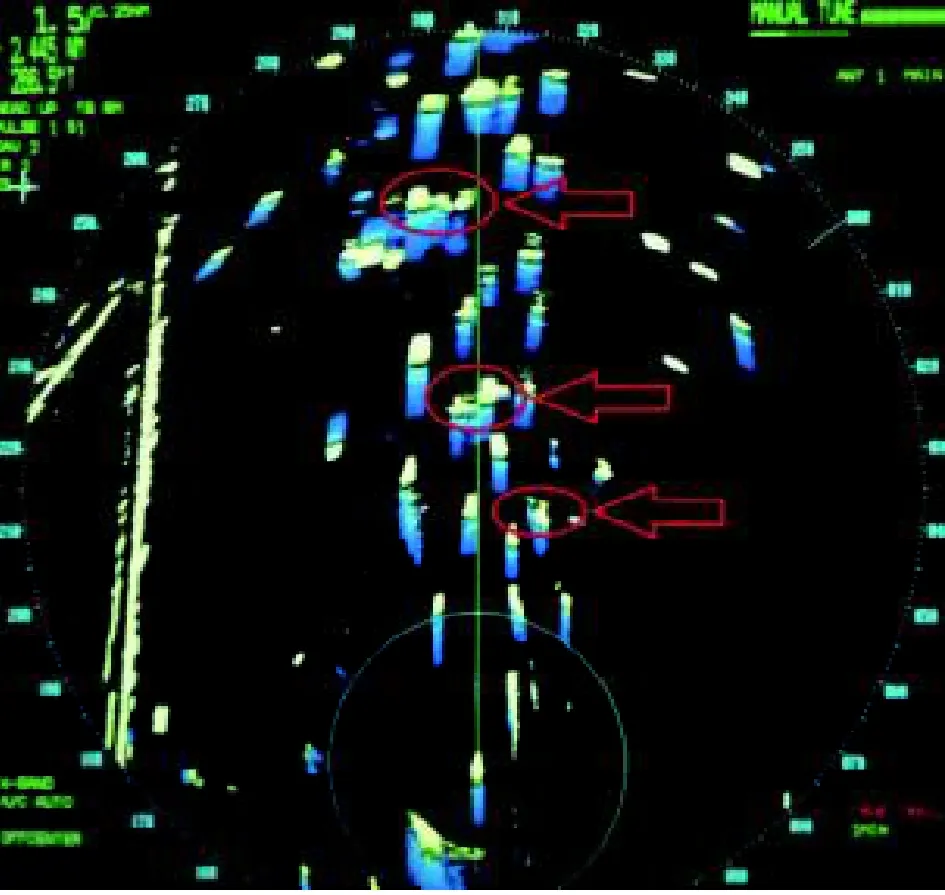
圖1 上海港進口高峰雷達圖像
(二)雷達跟蹤處理目標信息存在延時
雷達捕獲目標后,需要對目標信息進行濾波處理,才能穩定地跟蹤目標。在濾波過程中,雷達需要累積目標的過往數據,濾除各種傳感器誤差,平滑目標及本船的運動和氣象海況等的不利影響[2]。在完成這些過程后,雷達才能預測目標未來的航向和航速,計算并輸出目標的運動數據。從濾波的過程可以看出,雷達捕獲目標后要延遲一段時間才能輸出目標的運動數據。當目標發生機動航行時,由于濾波過程的耗時,導致雷達不能及時反饋目標的機動變化,對目標運動的預測存在延時。濾波過程造成了雷達對目標機動處理的延時,因而影響了雷達對近距離、高機動目標的跟蹤精度[2]。
圖2中的3號目標(箭頭位置)是在上海港北槽航道作業的測量船,在作業過程中多次穿越航道,其機動尤為頻繁。圖2是在其掉頭時所拍攝。通過圖中3號目標的真尾跡,可以看出測量船已經完成了掉頭,并開始向東北方向航行,但其真矢量卻依然指向西南方向,存在明顯錯誤。在面對高機動的目標時,雷達提供的目標運動數據并不可靠,甚至會給出錯誤的數據。
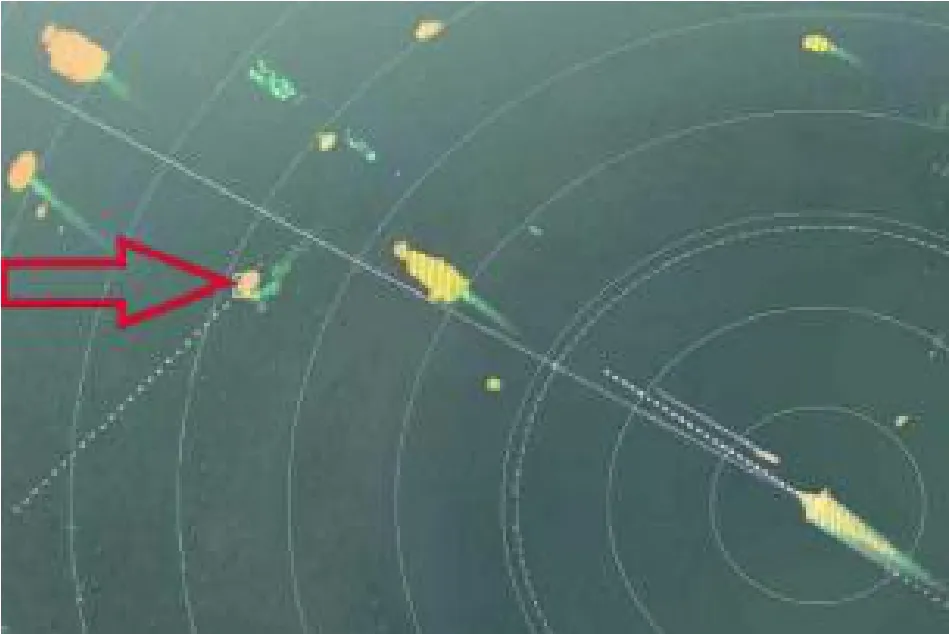
圖2 機動目標雷達圖像
三、港口水域內雷達圖像的調節
由于海上開闊水域的航行環境和港口水域存在較大區別,船舶從海上進入港口水域時,雷達回波組成變得更為復雜。簡單地減小雷達量程,直接沿用海上的圖像調節參數,難以發揮雷達應有性能。
(一)雷達圖像應隨航行環境的變化而不斷優化
在港口水域,雷達回波的組成要比海上開闊水域更為復雜。除了海上常見的海浪雜波、雨雪雜波外,還有多種假回波。這主要是因為,在港口水域目標距離近,岸吊、高樓等強反射目標多,使得雷達波反射更為強烈,易形成多種假回波和雜波。使用雷達時,應選擇合適的量程和脈沖寬度,有針對性地調節增益和雜波抑制控鈕,使雷達圖像與航行環境時刻保持匹配。
以船舶在上海港北槽航道進口航行為例,到達橫沙島以前,船舶密度通常不大,但航道兩側水域常有小漁船活動,這時應優先考慮雷達對弱小目標的探測,應適當加大增益并選擇寬脈沖。到達橫沙島后,船舶密度開始變大,強反射目標增多,小漁船數量有所減少,這時應優先考慮雷達的探測精度和目標分辨力,可選擇窄脈沖并適當減小增益。
(二)注意調節雷達圖像時各參數之間的矛盾
在調節雷達圖像時,有些參數之間往往是互相矛盾的。比如,為了提高雷達對弱小目標的探測能力,需加大增益,選擇更大的脈沖寬度,但這可能導致其他目標回波失真,雜波增強,雷達探測精度和目標分辨力降低。為了應對港口水域船舶密度高、強反射源多的航行環境,使用雷達時應減小增益,選擇窄脈沖,以提高雷達的探測精度和目標分辨力,但這會降低雷達對弱小目標的探測能力。因此很難找到一組適合所有航行環境的調節參數。雷達圖像調節的過程實際上是雷達各性能之間相互平衡的過程,不可能找到某一組參數使得雷達的各種性能都達到最佳狀態。
四、港口水域使用雷達時的注意事項
(一)雷達不適合在港口水域避碰
1.雷達的CPA精度不能滿足港口水域避碰要求
根據IMO雷達設備性能標準MSC192.(79)規定,在雷達對目標建立穩定跟蹤后,CPA精度為±0.3海里[1]。在海上開闊水域,船舶間CPA通常控制在2海里左右,±0.3海里的CPA精度能夠保證安全。在港口水域,船舶間CPA可能會減小到僅有幾十米。例如在上海港的北槽航道、黃浦江這樣的狹水道內,船舶間CPA很可能小于0.1海里,這樣的CPA數據已經遠遠超出了雷達設備的性能標準,不能用于避碰。有資料認為當CPA控制到0.8海里仍不能滿足航行需要時,雷達提供的信息就只能作為參考[2]。因此,在船舶密度較大的港口水域不能簡單依據雷達數據采取避碰措施。
2.雷達解算目標運動數據耗時過長不滿足港口水域避碰要求
在IMO雷達設備性能標準MSC192.(79)中規定,雷達應在3分鐘內顯示目標預測運動[1]。從雷達捕獲目標,到解算出滿足精度要求的目標運動數據,存在近3分鐘的延時。使用雷達避碰時,通常應選擇12海里量程[3]。這是考慮到了雷達避碰的原理和相關性能限制的合理做法。但在港口水域內,雷達多使用3海里或1.5海里甚至更小的量程(黃浦江內多使用0.75海里量程)。面對距離如此近的目標,3分鐘的等待時間過長,會引發更多的碰撞風險。有資料顯示,全世界每年因雷達延時造成碰撞的船舶達數百艘之多[4]。
在復雜的航行環境中,雷達可能無法分辨目標,出現目標丟失、目標交換、處理延時等問題,也可能出現因目標數據超出雷達性能標準,導致目標數據不可信、雷達頻繁報警等問題。這些因素使得雷達在港口水域不能用于避碰。
(二)在港口水域使用雷達時不適合使用對水速度
在港口水域航行時,雷達目標種類和數量都遠多于海上,既有浮標、拋錨船等靜止目標,更有大量航行船舶這類運動目標。駕引人員在面對大量雷達目標時,不可能將注意力平均分配給每個目標。因此,如何在大量目標中快速準確地找出危險目標,對港內安全航行有著重要意義。雷達的真尾跡功能可以起到快速區分目標的作用[4],但要有效使用該功能,還需正確選擇本船的速度。
圖3、圖4是上海港江亞錨地出口航行時拍攝的雷達圖像。圖3中本船速度選擇的是對水模式。該模式下,拋錨船、浮標等靜止目標以與風流壓差相反的方向和速度移動,其顯示的對水真尾跡和運動目標的對水真尾跡很相似,難以通過雷達快速區分并找出危險目標。本船的對水真矢量也不能直觀準確地反映本船風、流壓差的大小,不利于監控船位和避讓固定目標,特別是在水流復雜的水域會產生更多的航行風險。圖4中本船速度選擇的是對地模式。該模式下,駕引人員通過雷達能快速分辨出哪些是應該重點關注的目標,可以時刻掌握本船的風、流壓差,有利于港口水域的安全航行。
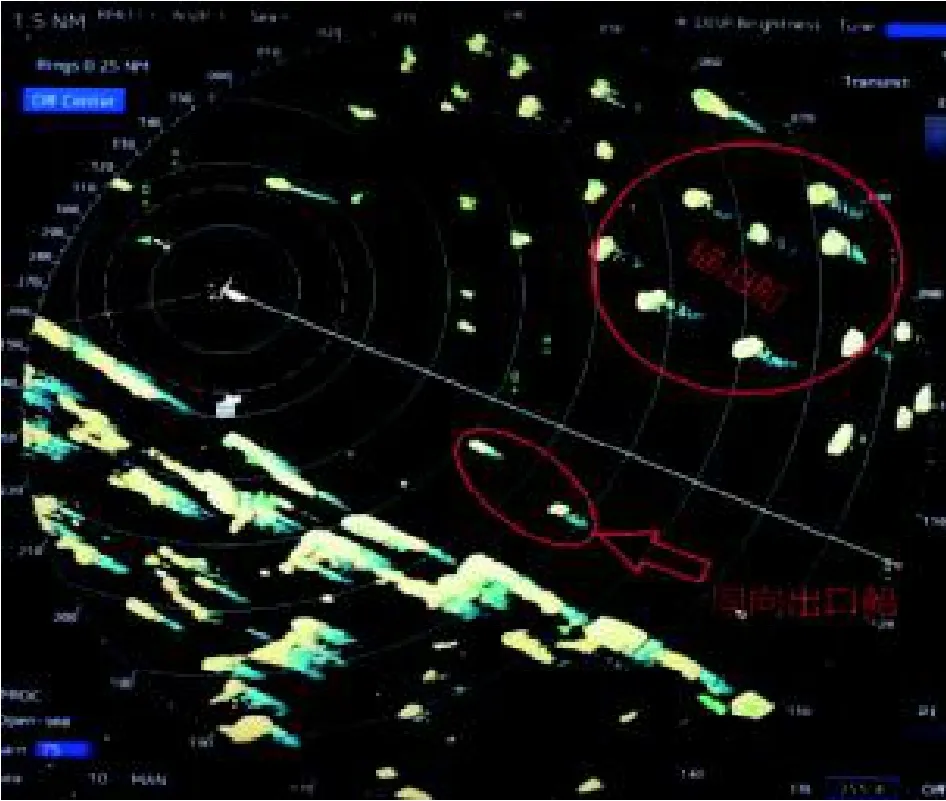
圖3 對水真運動模式雷達圖像
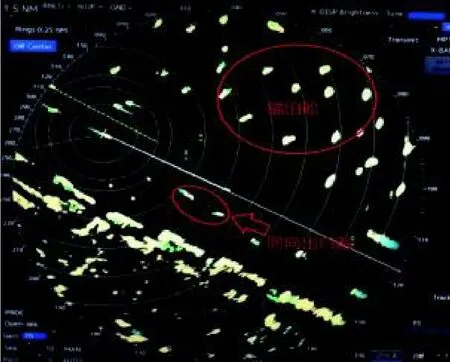
圖4 對地真運動模式雷達圖像
在實際工作中,常遇到有些船舶為滿足避碰要求,進入港口水域后仍堅持選擇對水速度(如圖5所示)。這可能與船公司體系文件的規定有關。有些公司為了規避可能產生的法律風險,在體系文件中明確要求船長或駕駛員,在港口水域使用雷達時選擇對水速度。面對港口水域復雜的航行環境,這種為了規避法律風險,不考慮具體環境的做法是不明智的,也可能是危險的。船公司在制定相關體系文件時應該更為細致,最好將港口水域和海上開闊水域區分開來,分別制定相應體系文件。

圖5 某船雷達使用規則
(三)謹慎使用雷達的自動雜波控制功能
雷達自動雜波抑制主要有自動海浪雜波抑制(AUTO-SEA)、自動雨雪抑制(AUTO-RAIN)、自動抗雜波(CFAR)等。自動雜波抑制功能通常只適合回波組成比較簡單的水域[2]。在港口水域,雷達回波組成復雜,包含多種類型目標回波及雜波。自動雜波抑制無法等效處理這些復雜多樣的回波,可能導致弱小目標回波被當成雜波抑制。特別是當本船雷達處于不穩定顯示模式下,本船首向的變化會引起目標回波的不穩定,弱小目標的回波更容易被抑制。因而,在使用自動雜波抑制功能時,要更為謹慎地對待弱小目標,同時要避免在不穩定顯示模式下使用自動雜波抑制功能。
五、結束語
駕引人員在使用雷達時,應充分考慮本船周圍的航行環境和雷達設備的性能限制。尤其是進入港口水域時,要注意復雜的航行環境會對雷達設備帶來諸多不利影響,甚至導致雷達的部分功能不適用。不應強調在港口水域內使用雷達的避碰功能,而應合理使用雷達的定位、導航、瞭望、觀測等其他有助于航行安全的功能。同時,為了更好地使用雷達,應該選擇合適的顯示模式和速度,并對雷達圖像進行適當的調節。沿用在海上開闊水域的雷達設置,可能無法發揮雷達設備的應有性能,并帶來額外的航行風險。
猜你喜歡
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:22
艦船科學技術(2022年14期)2022-09-22 03:07:40
機電設備(2022年2期)2022-06-15 03:20:38
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
當代工人(2019年20期)2019-12-13 08:26:11
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
水上消防(2018年4期)2018-09-18 01:49:38
中國船檢(2017年3期)2017-05-18 11:33:09
