基于神經(jīng)網(wǎng)絡(luò)PID的番茄室溫環(huán)境控制
2020-07-18 04:06:54胡香玲李春林
食品工業(yè) 2020年6期
胡香玲,李春林
鄭州電力高等專科學(xué)校(鄭州 450000)
隨著中國農(nóng)村農(nóng)業(yè)技術(shù)的快速發(fā)展,農(nóng)業(yè)生產(chǎn)逐漸由傳統(tǒng)的粗放經(jīng)營模式向現(xiàn)代集約自動(dòng)智能型經(jīng)營模式轉(zhuǎn)變[1-2]。溫室作為一種重要的農(nóng)業(yè)現(xiàn)代化食品種植方式,溫室中種植的大部分是具有客觀的經(jīng)濟(jì)效益的反季或抗寒能力較差的果蔬[3-4]。
番茄作為主要的蔬菜食品之一,也是中國北方溫室主要培育的農(nóng)作物。番茄因其對(duì)溫室溫度、濕度及CO2濃度均比較敏感,合適的條件能顯著提高番茄產(chǎn)量,相反如果條件變化較大、控制精度低,則嚴(yán)重影響番茄品質(zhì)和產(chǎn)量,因此對(duì)溫室環(huán)境進(jìn)行有效控制對(duì)于提高番茄品質(zhì)和產(chǎn)量具有重要現(xiàn)實(shí)意義。
為對(duì)室溫環(huán)境進(jìn)行有效控制、提高產(chǎn)品品質(zhì),大多數(shù)溫室大棚控制器采用傳統(tǒng)PID控制算法[5-8]。但是溫室環(huán)境控制往往具有時(shí)變性和滯后性,如何實(shí)現(xiàn)溫室環(huán)境精確控制成為一個(gè)亟需解決的問題。傳統(tǒng)PID控制算法結(jié)構(gòu)簡單、易于實(shí)現(xiàn)、使用面廣,不過無法較好處理時(shí)變和滯后類問題,因此控制效果一般。針對(duì)傳統(tǒng)控制方法不足,眾多專家將智能控制算法引入到傳統(tǒng)PID控制算法中,實(shí)現(xiàn)PID控制器參數(shù)在線可調(diào)。如鄧娜等利用模糊算法對(duì)PID參數(shù)進(jìn)行實(shí)時(shí)整定,提高控制精度,降低響應(yīng)時(shí)間,具有很強(qiáng)的魯棒性。李勇等提出一種基于優(yōu)化PID的控制方法,PID的控制參數(shù)通過BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行優(yōu)化。
在現(xiàn)有研究基礎(chǔ)上,設(shè)計(jì)一種將神經(jīng)網(wǎng)絡(luò)控制及傳統(tǒng)PID控制相結(jié)合的番茄溫室環(huán)境控制方法,通過神經(jīng)網(wǎng)絡(luò)自我學(xué)習(xí)能力,實(shí)現(xiàn)傳統(tǒng)PID控制器參數(shù)的在線調(diào)整。仿真結(jié)果表明,該控制方法能顯著提高系統(tǒng)收斂速度,提高溫室環(huán)境控制精度。
1 溫室系統(tǒng)
設(shè)計(jì)的番茄溫室環(huán)境智能控制主要通過可編程控制器PLC實(shí)現(xiàn),控制系統(tǒng)主要采用模塊組合控制方式,利用PLC強(qiáng)大的運(yùn)算、功能塊能力及模擬量精確采集能力,實(shí)現(xiàn)溫室環(huán)境的多功能控制。番茄生長過程中主要受溫室中的溫度、濕度、CO2濃度等因素影響,為此設(shè)計(jì)溫室環(huán)境控制系統(tǒng)主要是針對(duì)上述影響番茄生長因素進(jìn)行精確控制。溫室環(huán)境溫度控制系統(tǒng)主要由數(shù)據(jù)采集系統(tǒng)、數(shù)據(jù)處理系統(tǒng)及執(zhí)行機(jī)構(gòu)組成。室溫控制系統(tǒng)結(jié)構(gòu)如圖1所示。數(shù)據(jù)采集系統(tǒng)主要由溫度采集傳感器、濕度采集傳感器、CO2濃度采集傳感器等組成,上述傳感器將采集信息傳送到松下PLC模擬量采集模塊中,經(jīng)過模擬量采集模塊將模擬量轉(zhuǎn)化為數(shù)字信號(hào),并將數(shù)字信號(hào)存放在PLC數(shù)據(jù)寄存器中。數(shù)據(jù)處理系統(tǒng)主要由PLC CPU調(diào)用智能PID運(yùn)算模塊,將PLC中存儲(chǔ)的數(shù)據(jù)進(jìn)行處理,通過智能PID控制算法PLC發(fā)出相應(yīng)的控制信號(hào),并對(duì)相關(guān)執(zhí)行機(jī)構(gòu)進(jìn)行驅(qū)動(dòng)。溫調(diào)系統(tǒng)主要通過加熱和降溫2種方式進(jìn)行配合,溫室溫度過低時(shí)通過管道傳熱方式進(jìn)行,需要降溫時(shí)打開風(fēng)機(jī)等降溫設(shè)備進(jìn)行降溫。
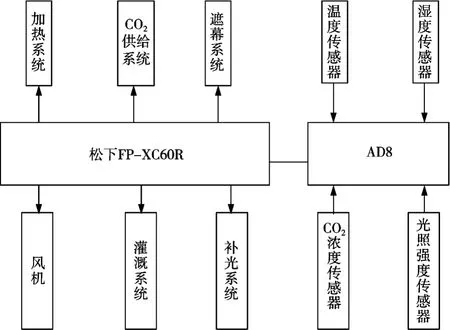
圖1 溫室控制系統(tǒng)結(jié)構(gòu)
2 溫室控制系統(tǒng)硬件設(shè)計(jì)
為實(shí)現(xiàn)番茄溫室大棚溫控系統(tǒng)智能化控制,整個(gè)系統(tǒng)分為2種控制模式,分別為自動(dòng)控制模式和手動(dòng)控制模式;自動(dòng)模式即通過控制器及傳感器實(shí)現(xiàn)完全自動(dòng)化智能控制,手動(dòng)模式即通過人機(jī)交互系統(tǒng)實(shí)現(xiàn)各執(zhí)行機(jī)構(gòu)的手動(dòng)分別控制。
溫室溫控系統(tǒng)主要由遠(yuǎn)程監(jiān)控電腦、人機(jī)觸摸屏、PLC及各種傳感器組成,遠(yuǎn)程電腦主要通過USB轉(zhuǎn)485轉(zhuǎn)換器與PLC實(shí)現(xiàn)通信,上位機(jī)觸摸屏與PLC由RS232串口實(shí)現(xiàn)數(shù)據(jù)交互。溫室控制系統(tǒng)硬件結(jié)構(gòu)如圖2所示。上位監(jiān)控系統(tǒng)主要由PC機(jī)完成,通過組態(tài)王軟件進(jìn)行組態(tài)編程,將溫室控制系統(tǒng)中各種參數(shù)進(jìn)行采集監(jiān)控。PLC主要負(fù)責(zé)將傳感器采集到的數(shù)據(jù)進(jìn)行存儲(chǔ),并將其數(shù)據(jù)在人機(jī)觸摸屏上進(jìn)行顯示,通過PLC中編寫的智能控制算法確定控制輸出值,進(jìn)而控制執(zhí)行機(jī)構(gòu)的開啟和關(guān)閉。
在選擇PLC時(shí),確定PLC的輸入和輸出點(diǎn)數(shù),番茄溫室溫控系統(tǒng)輸入有17個(gè)輸入,15個(gè)輸出。為預(yù)留一部分I/0點(diǎn)數(shù),以便系統(tǒng)在增加輸入輸出時(shí)使用,同時(shí)考慮番茄溫室環(huán)境惡劣,經(jīng)常需要更換控制器,因此選擇模塊式PLC,選擇松下FP-XC60R PLC,可編程控制器擁有24 V DC輸入32點(diǎn),2A繼電器輸出28點(diǎn),該P(yáng)LC可實(shí)現(xiàn)多個(gè)I/0模塊擴(kuò)展,以及多路模擬量數(shù)據(jù)采集。該機(jī)型采用的供電電源為交流110 V/220 V電源、內(nèi)部的供電是直流24 V電源輸入。模擬量采集模塊為AFP0RAD8,該模塊擁有8路輸入,可實(shí)現(xiàn)0~20 mA模擬量采集。溫度的測量選擇PT1000溫度傳感器進(jìn)行測量,在松下FP-XC60R內(nèi)部通常會(huì)將模擬量先轉(zhuǎn)化為數(shù)字量,將其存儲(chǔ)在數(shù)據(jù)寄存器中。

圖2 溫室控制系統(tǒng)硬件結(jié)構(gòu)
3 神經(jīng)網(wǎng)絡(luò)PID控制
為實(shí)現(xiàn)番茄溫室各種環(huán)境因素的穩(wěn)定控制,通常采用PID控制算法進(jìn)行閉環(huán)自動(dòng)控制,PID控制雖然結(jié)構(gòu)簡單,但對(duì)于番茄溫室控制存在各種復(fù)雜的情況,就溫室溫度控制,由于被控對(duì)象數(shù)學(xué)模型建立較為困難,同時(shí)存在很多的環(huán)境變化,PID控制器參數(shù)又固定不變很難應(yīng)對(duì)復(fù)雜的環(huán)境[9-11],為提高控制系統(tǒng)穩(wěn)定性,設(shè)計(jì)一種神經(jīng)網(wǎng)絡(luò)PID控制器,由神經(jīng)網(wǎng)絡(luò)對(duì)PID參數(shù)進(jìn)行自適應(yīng)調(diào)整。RBF-PID溫度控制器結(jié)構(gòu)如圖3所示。

圖3 RBF-PID控制器結(jié)構(gòu)
對(duì)于PID控制器,以設(shè)定值r(k)和實(shí)際反饋值y(k)之間的偏差e(k)作為輸入,即:

常規(guī)增量式數(shù)字PID控制算法可描述為:

式中:Kp為比例系數(shù)、Ki為積分系數(shù)、Kd為微分系數(shù),這幾個(gè)參數(shù)可根據(jù)系統(tǒng)運(yùn)行狀態(tài)進(jìn)行調(diào)整。
網(wǎng)絡(luò)辨識(shí)器的性能指標(biāo)函數(shù)可定義為:

采用迭代算法,具體表達(dá)式為:


其輸出u(k)可表示為:
式中:η為學(xué)習(xí)速率;α為動(dòng)量因子。
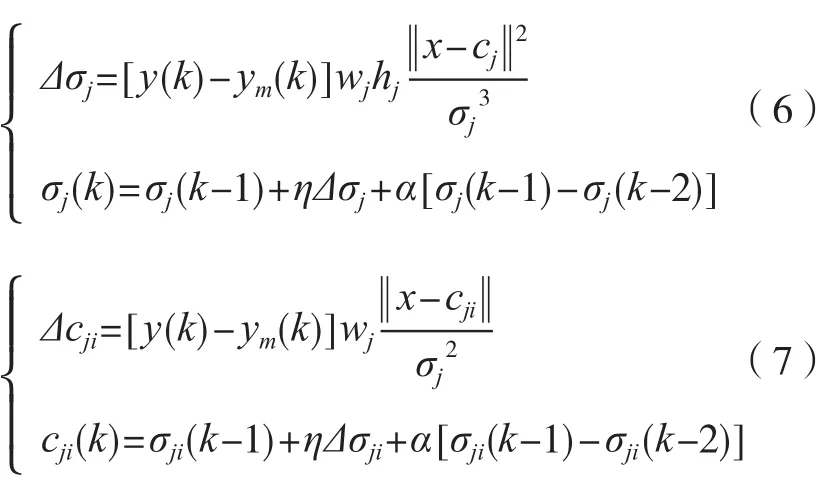
Kp、Ki、Kd這3個(gè)參數(shù)采用梯度下降的方法進(jìn)行調(diào)整:

式中:

4 仿真分析
為驗(yàn)證設(shè)計(jì)的番茄溫室控制系統(tǒng)的有效性,以溫室溫度控制為研究對(duì)象進(jìn)行仿真分析。番茄溫室溫度因其是一個(gè)非線性、時(shí)變性系統(tǒng)。因此選用一階慣性函數(shù)對(duì)溫室溫度控制數(shù)學(xué)模型進(jìn)行描述,其傳遞函數(shù)為:

采用單純PID控制器和RBF神經(jīng)網(wǎng)絡(luò)PID控制器對(duì)其進(jìn)行分別仿真,仿真曲線如圖4所示。系統(tǒng)在初始階段,PID出現(xiàn)較大的超調(diào),而神經(jīng)網(wǎng)絡(luò)PID控制器能夠在很短時(shí)間內(nèi)達(dá)到穩(wěn)定,且超調(diào)量很小。當(dāng)系統(tǒng)被控對(duì)象在300 s出現(xiàn)干擾時(shí),PID控制器出現(xiàn)明顯波動(dòng),且穩(wěn)定時(shí)間較長。神經(jīng)網(wǎng)絡(luò)PID控制器超調(diào)量很小,能在很短時(shí)間快速達(dá)到穩(wěn)定。由此可以看出,神經(jīng)網(wǎng)絡(luò)PID控制器擁有較強(qiáng)的自適應(yīng)性,具有良好的魯棒性及抗干擾能力,其控制性能明顯優(yōu)于傳統(tǒng)PID控制器。
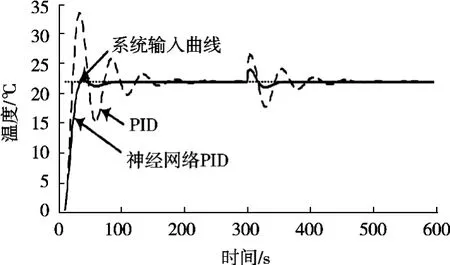
圖4 仿真曲線
5 結(jié)語
為提高番茄溫室溫度、濕度、CO2濃度等參數(shù)的控制精度以及提高其穩(wěn)定性,設(shè)計(jì)一種基于神經(jīng)網(wǎng)絡(luò)PID的番茄溫室環(huán)境智能控制系統(tǒng)。針對(duì)溫室大棚控制要求對(duì)控制系統(tǒng)的硬件進(jìn)行設(shè)計(jì),利用PC機(jī)對(duì)控制系統(tǒng)中參數(shù)進(jìn)行監(jiān)控,由PLC完成數(shù)據(jù)采集及邏輯控制。針對(duì)傳統(tǒng)PID控制效果不理想,在傳統(tǒng)PID控制中引入神經(jīng)網(wǎng)絡(luò)控制方法,利用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)PID控制參數(shù)的在線自適應(yīng)調(diào)整。仿真結(jié)果表明,該控制器能顯著提高溫室環(huán)境控制精度,提高系統(tǒng)魯棒性和自適應(yīng)性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
- 食品工業(yè)的其它文章
- 人本主義視角下高校食品專業(yè)思想政治教育研究
——評(píng)《中國飲食文化概論》 - 以《食品專業(yè)英語》為教材下的食品專業(yè)英語教學(xué)模式創(chuàng)新
- 人性化設(shè)計(jì)理念在食品包裝中的應(yīng)用
——評(píng)《食品包裝學(xué)》 - 傳統(tǒng)食品包裝設(shè)計(jì)的視覺文化
——評(píng)《食品包裝》 - 發(fā)展食品行業(yè)福利企業(yè) 推動(dòng)殘疾人就業(yè)
——評(píng)《福利企業(yè)的發(fā)展與殘疾人就業(yè)政策改革》 - 從食品專業(yè)英語看高校專業(yè)英語教學(xué)改革
——評(píng)《食品專業(yè)英語》