高分七號衛(wèi)星載荷任務管理中的解耦設計
2020-07-15 09:33:18張莎莎莫凡丁建釗徐文強姚鑫雨劉付強
航天器工程 2020年3期
張莎莎 莫凡 丁建釗 徐文強 姚鑫雨 劉付強
(1 北京空間飛行器總體設計部,北京 100094)(2 北京控制工程研究所,北京 100094) (3 西安空間無線電技術研究所,西安 710071)
隨著近地遙感衛(wèi)星技術的發(fā)展,衛(wèi)星載荷數量和功能也不斷提升,就使得工作模式設計較為復雜。因此為方便衛(wèi)星用戶使用,遙感衛(wèi)星普遍開展了星上自主任務管理設計。
國外在衛(wèi)星自主任務規(guī)劃和管理方面已相繼開展了相關的技術研究。NASA在地球觀測(EO-1)衛(wèi)星的基礎上,先后開發(fā)了自主調度與規(guī)劃(ASPEN)[1]及調度和執(zhí)行程序框架(CASPER)[2]兩大衛(wèi)星任務規(guī)劃系統(tǒng)。ESA支持的星上自主計劃(PROBA)[3]研究并驗證了一些星載自主規(guī)劃技術;法國國家空間研究中心(CNES)在其昂宿星(Pleiades)上開展了衛(wèi)星自主任務規(guī)劃系統(tǒng)的試驗[4]。與此同時,國內也開展了很多遙感衛(wèi)星任務規(guī)劃技術研究。賀仁杰等人針對地面多星任務規(guī)劃問題提出了規(guī)劃模型和算法,并開發(fā)了一整套地面任務規(guī)劃系統(tǒng),但該系統(tǒng)目前主要應用于地面[5]。田志新等人提出基于有向圖模型的衛(wèi)星任務指令生成算法,首次在星上實現任務級指令到執(zhí)行級指令的分解,該方法中雖然統(tǒng)籌考慮了觀測任務和回放任務,但對于觀測和回放任務的解耦工作仍由地面系統(tǒng)而非衛(wèi)星自主完成[6]。
高分七號(GF-7)衛(wèi)星是一顆高精度民用測繪衛(wèi)星,衛(wèi)星軌道高度約500 km,星上裝載了前、后視測繪相機和激光測高儀,通過對同一區(qū)域不同角度的觀測,實現1∶10 000比例尺衛(wèi)星測繪。本文分析了GF-7衛(wèi)星工作模式的特點,以典型的觀測模式和回放模式為設計基礎,梳理了兩種工作模式間的約束和耦合關系,并從消除耦合、簡化衛(wèi)星任務管理、提升衛(wèi)星對任務的快速、無條件響應的需求出發(fā),提出了一種適用于星上自主任務管理的工作模式解偶設計,有效滿足了不同工作模式的無約束實現。
1 衛(wèi)星工作模式解耦設計的必要性
1.1 衛(wèi)星工作模式簡介
GF-7衛(wèi)星對地觀測任務的完成包括觀測記錄和數據回放兩個活動。
觀測記錄模式(簡稱觀測模式),由地面觀測目標觸發(fā):衛(wèi)星飛經觀測目標時,衛(wèi)星平臺將飛行姿態(tài)調整至觀測所需姿態(tài),有效載荷開機并對地觀測,星上數據處理及傳輸系統(tǒng)對載荷觀測數據進行處理、格式編排后,實時送入星載存儲器進行存儲。當進行連續(xù)多目標成像觀測時,則衛(wèi)星平臺需在多個目標的間隔時間內完成快速姿態(tài)機動和穩(wěn)定,以使得載荷觀測視場指向各觀測目標。
數據回放模式(簡稱回放模式)由地面站可視條件觸發(fā):衛(wèi)星飛經地面站可視范圍內,星上數據處理及傳輸系統(tǒng)對載荷觀測數據進行回放。為提高衛(wèi)星對地回放時的等效全向輻射功率(EIRP),衛(wèi)星采用X-Y二維機械轉動的高增益點波束天線,在對地面站傳輸過程中,需實時控制X、Y軸轉動,使得天線波束中心始終指向地面站。
1.2 衛(wèi)星工作模式間的耦合因素分析
除1.1節(jié)所述的觸發(fā)條件之外,衛(wèi)星工作模式還分別與圖1所示的各因素有關。
從圖1的梳理中可以看出,衛(wèi)星觀測模式和回放模式的耦合因素為衛(wèi)星平臺姿態(tài):一方面,觀測模式提出對衛(wèi)星姿態(tài)的期望,衛(wèi)星控制系統(tǒng)根據該期望,依照一定的控制策略,控制偏航、俯仰和滾動軸轉動來執(zhí)行姿態(tài)調整;另一方面,平臺姿態(tài)是回放模式中天線對地面站指向角度的決定因素之一。由此,產生兩種任務之間的耦合關系,如圖2所示,即觀測任務決定衛(wèi)星姿態(tài),衛(wèi)星姿態(tài)決定回放任務中天線指向。
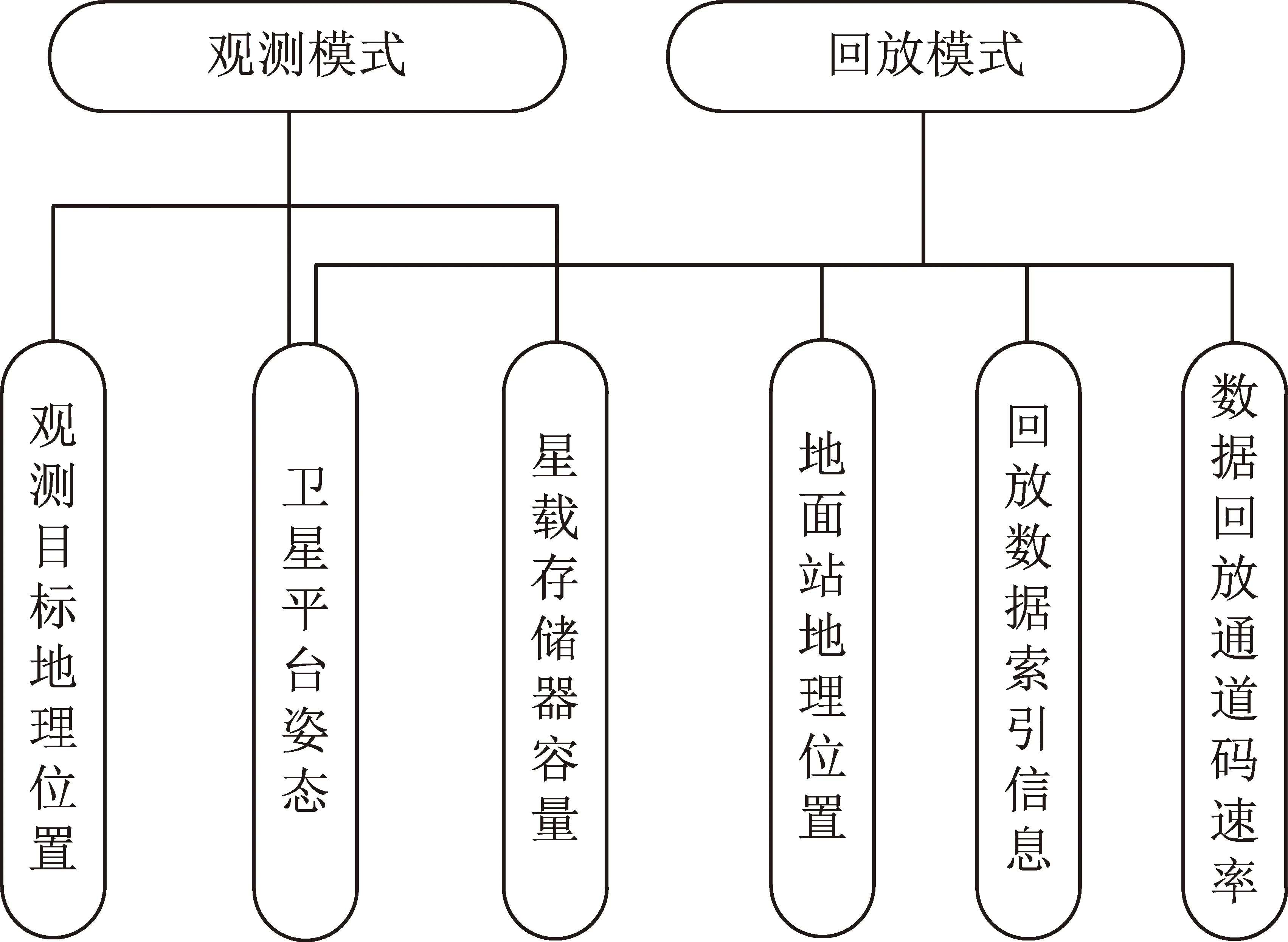
圖1 遙感衛(wèi)星工作模式耦合因素Fig.1 Coupling factors of working modes of a remote sensing satellite

圖2 衛(wèi)星姿態(tài)對觀測記錄模式和數據 回放模式的耦合關系Fig.2 Coupling relationship between observation recording mode and data playback mode in terms of satellite attitude
1.3 解耦設計必要性分析
為提高用戶使用體驗,使得衛(wèi)星能夠在滿足各模式觸發(fā)條件的基礎上即可制定和執(zhí)行相應的模式,GF-7衛(wèi)星提出觀測模式和回放模式可并行執(zhí)行、互無影響的使用需求。但由于在觀測模式準備過程中,為達到其期望姿態(tài),需要進行三軸姿態(tài)機動,機動過程為:初始姿態(tài)角度→勻角加速度α加速至最大角速度ω→以角速度ω做勻速轉動→勻角加速度減速至0(°)/s→機動到位。對于連續(xù)點目標觀測模式來說,需要衛(wèi)星在兩個點目標之間完成敏捷姿態(tài)機動;而傳統(tǒng)的回放模式設計均是以固定姿態(tài)角度為輸入,進行天線對地面站指向角的計算,未考慮姿態(tài)機動過程中由于姿態(tài)角的持續(xù)變化帶來的天線對地面站指向角的變化,這樣就會導致天線指向角度誤差隨著控制周期的增加而持續(xù)累加,最終超出±0.5°的指向精度要求,從而無法滿足敏捷機動點目標觀測過程中的數據回放。
綜上,為滿足衛(wèi)星觀測模式和回放模式的無干擾并行執(zhí)行,就必需進行針對衛(wèi)星姿態(tài)的解耦設計,在回放模式執(zhí)行過程中,將衛(wèi)星姿態(tài)預報引入天線指向角計算,以此提高天線指向精度。從而使得觀測模式和回放模式均能按照各自的觸發(fā)條件進入并執(zhí)行,相互之間無干擾、無制約。
2 低軌遙感衛(wèi)星工作模式解耦設計
2.1 衛(wèi)星姿態(tài)測量及轉換
要進行衛(wèi)星姿態(tài)預報,首先需要進行當前及歷史姿態(tài)的測量。衛(wèi)星姿態(tài)一般指衛(wèi)星本體相對于軌道坐標系下零姿態(tài)的偏差。GF-7衛(wèi)星配置星敏感器完成姿態(tài)高精度測量。在姿態(tài)測量及轉換過程中,涉及到以下坐標系及轉換關系:①星敏感器完成從星敏感器坐標系到慣性空間坐標系(J2000系)的轉換矩陣的實時測量,記為Tis;②設衛(wèi)星從慣性坐標系到軌道坐標系的轉換矩陣為Toi通常通過星載導航接收機或地面軌道測量數據計算得到;③設衛(wèi)星從軌道坐標系到本體坐標系轉換矩陣為Tbo;④設衛(wèi)星從星敏感器坐標系到本體坐標系的轉換矩陣Tbs,通常通過地面標定得到。
上述幾個轉換矩陣具有如下關系
Tbs=Tbo×Toi×Tis
(1)
進而可得
Tbo=Tbs×(Tis)T×(Toi)T
(2)
式(2)中,Tis通過星敏感器測量并計算得到。通常,星敏感器的輸出采用四元數Q的形式,有
Q=q0+q1i1+q2i2+q3i2
(3)
式中:q0表示四元數的標量部分,q1、q2、q3表示四元數的矢量部分,則有
(4)
若衛(wèi)星選用Z→Y→X轉序,則對應歐拉角表示的姿態(tài)矩陣為
(5)
式中:α、β、γ分別表示衛(wèi)星星體沿X、Y、Z三個軸向的姿態(tài)角。由此可得
(6)
式中:Tbomn表示坐標系轉換矩陣Tbo中的第m行第n列的元素。
2.2 衛(wèi)星姿態(tài)預報方法

2.3 工作模式解耦算法流程
采用二階多項式擬合的姿態(tài)預報及解耦算法流程如下:
(1)利用星敏感器輸出的q值,計算得到當前時刻衛(wèi)星本體坐標系相對于軌道坐標系的歐拉角,即得到衛(wèi)星三軸姿態(tài)角;
3 驗證與分析
為了驗證姿態(tài)預報算法的正確性和精度,采用GF-7衛(wèi)星軌道作為算例,利用本文研究的姿態(tài)預報算法,結合數傳天線對地面站指向角度的預報,并利用衛(wèi)星實際執(zhí)行的姿態(tài)進行驗證,最終得到由于姿態(tài)預報誤差引起的天線指向角度誤差。
3.1 算例說明
1)軌道信息
算例的衛(wèi)星軌道參數見表1。

表1 算例的起始歷元時刻軌道根數Table 1 Orbital elements at the beginning epoch time
2)地面站地理信息
算例中選用新疆喀什地區(qū)作為數傳接收地面站,喀什站的地理位置信息由STK軟件中自帶的數據信息獲得,地面站的約束條件為地面站仰角不小于5°,具體地理位置信息見表2。
在STK軟件中將衛(wèi)星起始歷元時刻的瞬根參數作為衛(wèi)星初始軌道參數值,采用HPOP模型,重力場模型選用21階的WGS84_EGM96模型,STK軟件的精確值中考慮了大氣阻力,設定面質比為0.008 m2/kg,F10.7=150,并考慮了太陽光壓和日月的三體引力影響。
表3為衛(wèi)星過喀什地區(qū)地面站的時間。

表2 仿真用喀什站地理位置信息Table 2 Geographic location information of Kashi station for simulation

表3 衛(wèi)星過喀站的時間Table 3 Arc segment of Kashi station
3)姿態(tài)機動情況
算例中,在衛(wèi)星過喀地面站期間,進行姿態(tài)機動,具體為俯仰軸和偏航軸角度保持不變,滾動軸由0°變化至32°,且其機動過程中的姿態(tài)角加速度絕對值|α|=0.033(°)/s2,最大轉動角速度ω=0.5(°)/s。具體的機動姿態(tài)角度曲線見圖3。

圖3 算例用姿態(tài)機動過程三軸角度曲線Fig.3 Three-axes attitude angle curves
3.2 結果分析
算例中利用本文的姿態(tài)預報算法周期性預報衛(wèi)星在姿態(tài)機動期間的姿態(tài)角度,預報周期為0.5 s,擬合樣本數為3,將預報得到的姿態(tài)曲線,以角度變化最大的滾動軸為例,與實際控制到位的姿態(tài)曲線進行比較,預報誤差見圖4。同時將姿態(tài)預報結果利用STK軟件對預報姿態(tài)下的天線指向角度進行仿真,得到該狀態(tài)下的指向角誤差如圖5和圖6所示。
仿真分析結果表明:①該姿態(tài)預報算法引起的姿態(tài)角預報誤差幅值范圍為[-0.051°,0.053°],該誤差最大值出現在機動軸開始加、減速的時刻,而在勻速轉動過程中,預報誤差不超過[-0.02°,0.02°];②由姿態(tài)預報誤差引起的天線X、Y軸指向角度計算誤差幅值范圍分別為[-0.055,0.040]和[-0.037,0.023],該誤差范圍與姿態(tài)預報誤差量級相當,對于指向精度優(yōu)于0.5°的指標要求,該誤差項貢獻約為10%,可滿足在軌使用。

圖4 算例輸出的滾動軸姿態(tài)預報誤差Fig.4 Predicted attitude angle error of rolling axis

圖5 由姿態(tài)預報誤差引起的天線X軸 指向角誤差Fig.5 Pointing angle error of X-axis induced by attitude prediction error
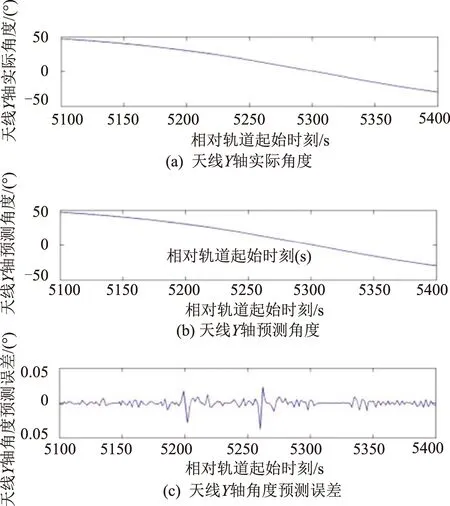
圖6 由姿態(tài)預報誤差引起的天線Y軸 指向角誤差Fig.6 Pointing angle error of Y-axis induced by attitude prediction error
4 結束語
本文對低軌道遙感衛(wèi)星觀測模式、回放模式中的姿態(tài)耦合因素進行了分析,建立了解耦用的姿態(tài)預報模型。這種方法簡單、易于星上實現,且預報精度可保證天線指向精度的工程要求,可作為星上工作模式自主運行使用。