基于線性二次型的橋式起重機荷載消擺控制算法的研究
2020-07-14 15:34:41劉卉崔輝
科技創新與應用 2020年21期
劉卉 崔輝
摘? 要:針對橋式起重機二維荷載運動的消擺問題,將其轉化為二次線性規劃控制。規范化實現求解線性二次型過程,采用由狀態線性反饋控制率構成的閉環最優控制系統,設計線性二次型軌跡跟蹤控制器。仿真結果表明,荷載運動的實際輸出軌跡能夠跟蹤上預設線軌跡,達到對運動荷載的消擺控制效果。
關鍵詞:線性二次型;橋式起重機;荷載消擺;軌跡跟蹤
中圖分類號:TP273? ? ? ? ?文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)21-0012-02
Abstract: Aiming at the problem of eliminating swing of two-dimensional load movement of bridge crane, it is transformed into quadratic linear programming control. The closed-loop optimal control system composed of state linear feedback control rate is used to design the linear quadratic trajectory tracking controller. The simulation results show that the actual output trajectory of the load movement can track the preset trajectory and achieve the effect of anti sway control of the moving load.
Keywords: linear quadratic form; bridge crane; load swing control; trajectory tracking
引言
線性二次型規劃控制算法的被控對象為線性系統,其通常以狀態空間的形式表達,并選取目標函數為狀態量和控制量的輸入。當系統偏離平衡狀態時,線性二次型控制算法能夠使系統重新維持在平衡狀態。由線性二次型控制器求解出的解析式通常是線性函數,這就可以通過狀態反饋實現閉環的最優控制,從而達到所需的控制效果。
3 荷載運動系統的仿真與分析
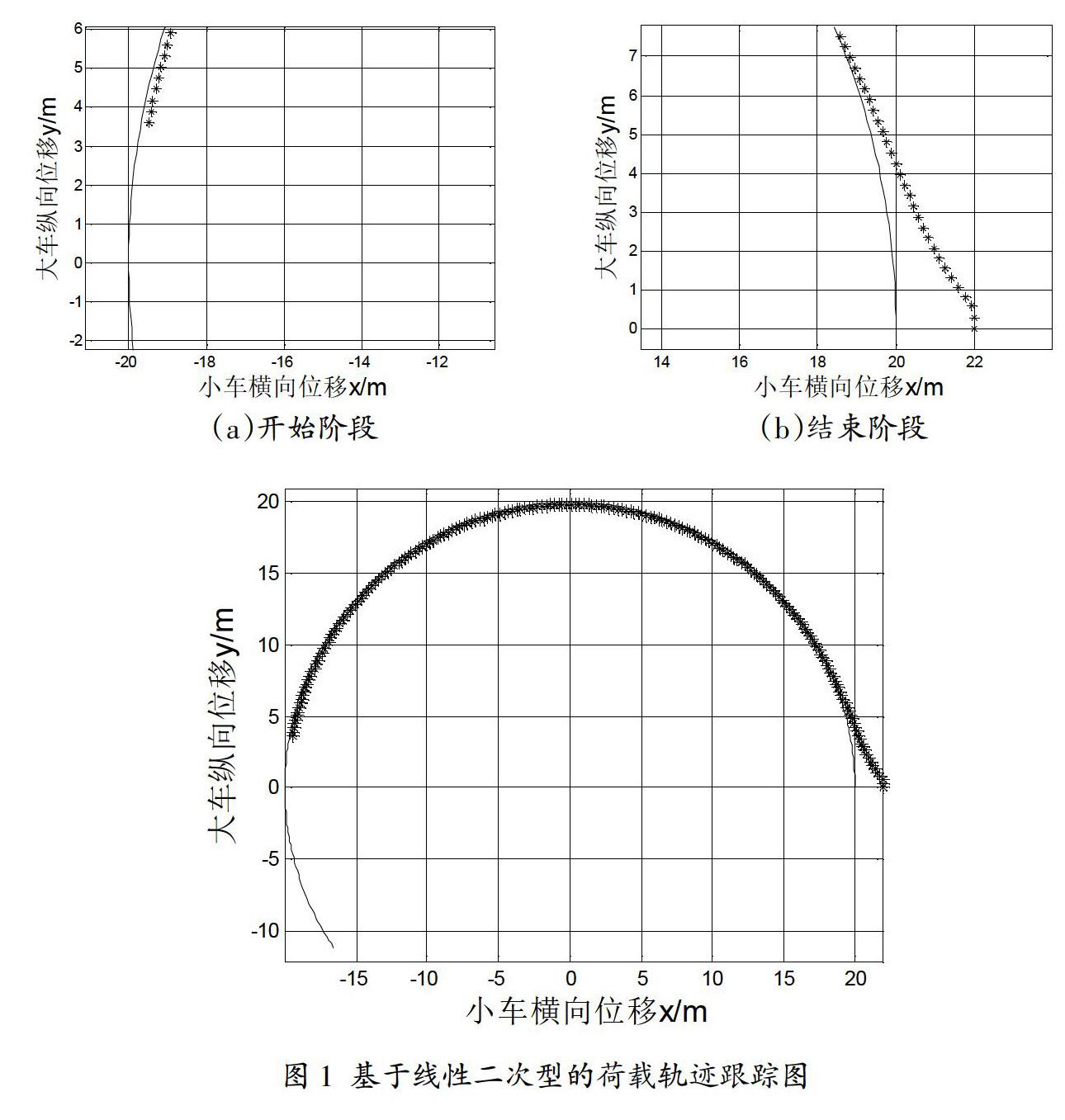
起重機荷載運動參數設定為:小車質量M=50kg,荷載質量m=20kg,繩長為l=2m,μ=0.2,重力加速度g=9.8m/s2,在Matlab環境下對二維荷載運動模型的消擺控制過程進行仿真。通過給定的運動各項系統參數,生成參考軌跡,并對目標函數進行求解,完成對設定軌跡跟蹤。
從圖1可以看出,在線性二次型控制器的作用下,荷載運動的實際輸出星軌跡能夠跟蹤上預設線軌跡,只在開始和結束階段存在稍許的偏差,控制效果明顯,能夠滿足消擺要求。
4 結論
運用狀態線性反饋控制構成最優化控制系統,將運動荷載的擺動問題轉化為二次線性規劃控制問題,設計荷載運動軌跡跟蹤控制器,實現對其運動軌跡進行跟蹤控制。為了實現規范化求解線性二次型的過程,將求解得到的最優解表達式寫成統一的解析式,并采用由狀態線性反饋控制率構成的閉環最優控制系統,這樣可以有效地保證多項性能的控制指標。
到目前為止,荷載擺動的抑制還主要依賴于工人熟練的操作經驗,真正應用到實際工程上的消擺控制算法還較少,大多數的控制方法還僅僅停留在仿真分析及等比例縮小模型的試驗上。因此,如何將控制策略應用到實際工程項目上,將成為我們面臨的一大挑戰。
參考文獻:
[1]Mohamad Kazem Shirani Faradonbeh,Ambuj Tewari, George Michailidis. On adaptive Linear-Quadratic regulators[J]. Automatica,2020,117.
[2]閆其樂,高俊嶺,吳晶晶.基于線性二次型最優調節器的虛擬同步發電機控制策略[J].重慶工商大學學報(自然科學版),2020,37(02):23-28.
[3]房澤平,吳娜.基于頻率線性二次型算法的智能車輛橫向控制[J].科學技術創新,2019(34):1-4.
[4]劉旭杰,徐惠民,陳豐.基于線性二次型的電動汽車最優驅動控制系統的設計與仿真分析[J].宿州學院學報,2019,34(06):80-84.
[5]李想,曾春年,羅杰,等.基于線性二次型最優控制的自適應巡航控制算法研究[J].武漢理工大學學報(信息與管理工程版),2019,41(02):191-196.
