管道終端舷側安裝動態分析
2020-07-13 07:08:22孫國民
海洋工程裝備與技術 2020年2期
王 猛, 孫國民
(海洋石油工程股份有限公司, 天津 300451)
0 引 言
在深海油氣田開發項目中,管道終端(pipeline end terminal, PLET)是常用的水下設施。PLET安裝方法包括管道鋪設時在作業線同步安裝和船舶舷側安裝等。舷側安裝是將對預先鋪設的管道回收至舷側懸掛后,在舷側的管道處理系統(pipeline handling system, PHS)上與PLET焊接,通過船舶移位和纜繩釋放協同作業,將管道和PLET回鋪至海床設計位置。相較于管道在線鋪設安裝,舷側下放可安裝更大尺寸和重量的PLET。
近年來國內外學者對管道結構物安裝進行了研究。尹漢軍等[1]對水下PLET各安裝步驟進行了分析,動力效應通過動力放大系數(dynamic amplification factor, DAF)計算;邢廣闊等[2]對管道在線鋪設安裝進行了靜態有限元分析,發現最大應變發生在PLET與管道連接位置;林秀娟等[3]研究了波流聯合作用下水下采油樹下放過程中的關鍵因素;龔銘煊等[4]建立了波浪、海流和平臺位移的共同作用下的水下采油樹安裝力學模型。余志兵等[5]采用頻域方法對PLET在線安裝進行了分析;Luis[6]介紹了在委內瑞拉灣惡劣海況下采用浮筒進行PLET在線安裝的方法。
本文對PLET舷側安裝過程進行研究,并建立了耦合系統的時域計算模型。對懸掛狀態和下放過程進行了靜態和動態分析,以確定影響管道強度的主要因素。
1 PLET舷側安裝方法
PLET功能要求決定其結構形式、尺寸和重量等。在一般情況下,PLET由防沉板、主結構、Yoke、吊耳等組成,其中主結構包括閥門、管道、結構框架等。南海某項目的PLET如圖1所示。

圖1 管道終端Fig.1 Pipeline end terminal
舷側安裝主要施工設備為管道處理系統(PHS),如圖2所示。PHS上設有固定框架,用于固定PLET。
在下放前,PLET重量由固定框架承受。PLET與管道焊接后下放,重量全部轉移至A/R纜。PHS的轉動和平移由液壓系統控制,可調整PLET位置以便保證與管道對接焊時的對口精度。

圖2 管道處理系統Fig.2 Pipeline handling system
舷側的懸掛平臺和懸掛管卡用于懸掛回收的管道。PLET和管道的對接工作在懸掛平臺上完成。管卡采用管領形式,通過液壓控制打開或關閉,管卡也可獨立調整位置和角度,以調整管道和PLET對接焊時的對口精度。
通過PHS和船舶側推協同作業,安裝過程主要分為三步:管道回收、管道與PLET對接和系統下放。安裝工序如下:
(1) 回收預先鋪設在海床上的管道至舷側,懸掛于PHS的卡子上。
(2) 吊裝PLET并將其固定在PHS上。
(3) 管道與PLET焊接,并進行節點防腐涂敷。
(4) 如需要,在Yoke上連接浮力塊。打開懸掛管卡和PLET固定機構,管道和PLET重量全部轉移至A/R纜。
(5) 外推PHS并釋放A/R纜,船舶側推進,開始下放。PLET和管道的下水過程由ROV進行監控。
(6) 系統繼續下放直到PLET到達預定位置上方,控制下放速度并緩慢將PLET放置于海床。
回收預鋪設管道時,管頂無結構物。通過分析確定合理的懸鏈線形態,管道應力可滿足規范要求,該工序不是安裝的關鍵工序。由于PLET重量比管道單位重量重(如南海某項目PLET水下重是管道單位水下重的489倍),對接后管道的管頂彎曲剛度、邊界條件以及動力響應發生變化。此外,從施工的時間考慮,與PLET對接的管道一般為冶金復合管。管道和PLET焊接采用自動焊機,焊接工藝要求高,焊接時間相對于普通碳鋼管較長,南海某項目管徑為219.1 mm,管道與PLET焊接用時近6個小時;加上焊縫檢驗和涂敷時間接近24個小時。管道與PLET對接后,管頂彎曲剛度發生變化(可認為是剛性固定)。開始下放后,整個系統會經歷不同水深,波流載荷隨水深變化。因此對接后系統的懸掛狀態和下放過程是兩個主要工序。本文考慮管道與PLET焊接后的工序過程,研究管道系統懸掛狀態和下放過程的管道強度問題。
2 計算模型
2.1 動力方程
系統動力方程如下:
M(p,a)+C(p,v)+K(p)=F(p,v,t)
(1)
式中:M(p,a)為系統慣性力;C(p,v)為系統阻尼力;K(p)為系統剛度;F(p,v,t)為外部載荷;p,v和a分別為位移、速度和加速度;t為時間。
根據PLET的結構形式,可將其近似為塊體;對于帶防沉板的PLET,可考慮為兩個塊體,以提高計算精度。其受到的水動力按Morison方程計算。
(2)
式中:Cm為慣性力系數;Ca為附加質量系數,Ca=Cm-1,按DNV-RP-C205[7]表6.2計算,計算時需將垂直流速方向的截面近似為正方形;Δ為流體置換PLET體積質量;af為流場加速度;ab為PLET加速度;ρ為流體密度;Cd為拖曳力系數;A為拖曳力面積;vr為PLET與流場相對速度。
2.2 邊界條件
PLET與管道對接后,管頂彎曲剛度、邊界條件以及動力響應發生變化。PLET重量、剛度與管道相差較大。南海某項目中PLET重約60 t,彎曲剛度可將管頂彎曲剛度近似為無限大。
施工船舶的運動應在動態分析中予以考慮。本文使用幅值響應算子(response amplitude operator, RAO)來計算船舶運動。
海床考慮為彈性土壤模型,法向和剪切剛度均取100 kN/m/m2進行計算。
3 PLET安裝分析
3.1 模型參數
本文使用OrcaFlex軟件對南海某項目的PLET安裝過程進行時域分析。在該項目中,管道外徑為219.1 mm, PLET總重為60 t,作業水深為745 m,其他模型參數如表1所示,波散布圖和90%超越概率流速如圖3和圖4所示。

表1 模型參數
(續表)
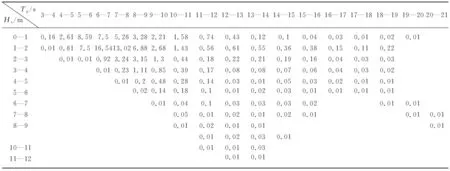
圖3 波散布圖
Fig.3 Wave scatter diagram

圖4 流速曲線Fig.4 Current velocity profile
3.2 懸掛分析
3.2.1 靜態分析
靜態模型不考慮波流載荷和船舶運動,如圖5所示。靜態分析的目的是確定PHS的傾斜角度、A/R纜張力、管頂張力和彎矩等以及影響管道強度的主要因素。靜態計算結果如表2所示。計算表明當PHS傾斜角度為20°時,管頂彎矩最小。管道彎矩和管道有效軸力分別如圖6和圖7所示,管道的最大彎矩出現在觸地區。
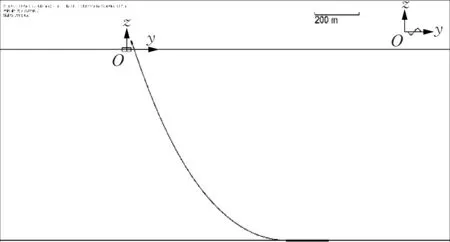
圖5 靜態模型Fig.5 Static model
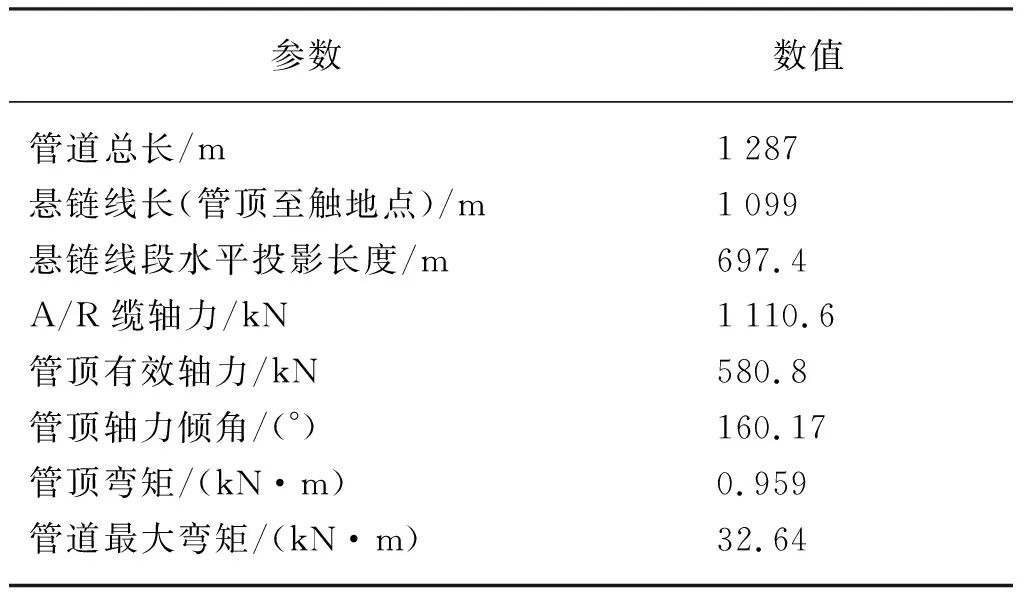
表2 懸掛靜態分析結果
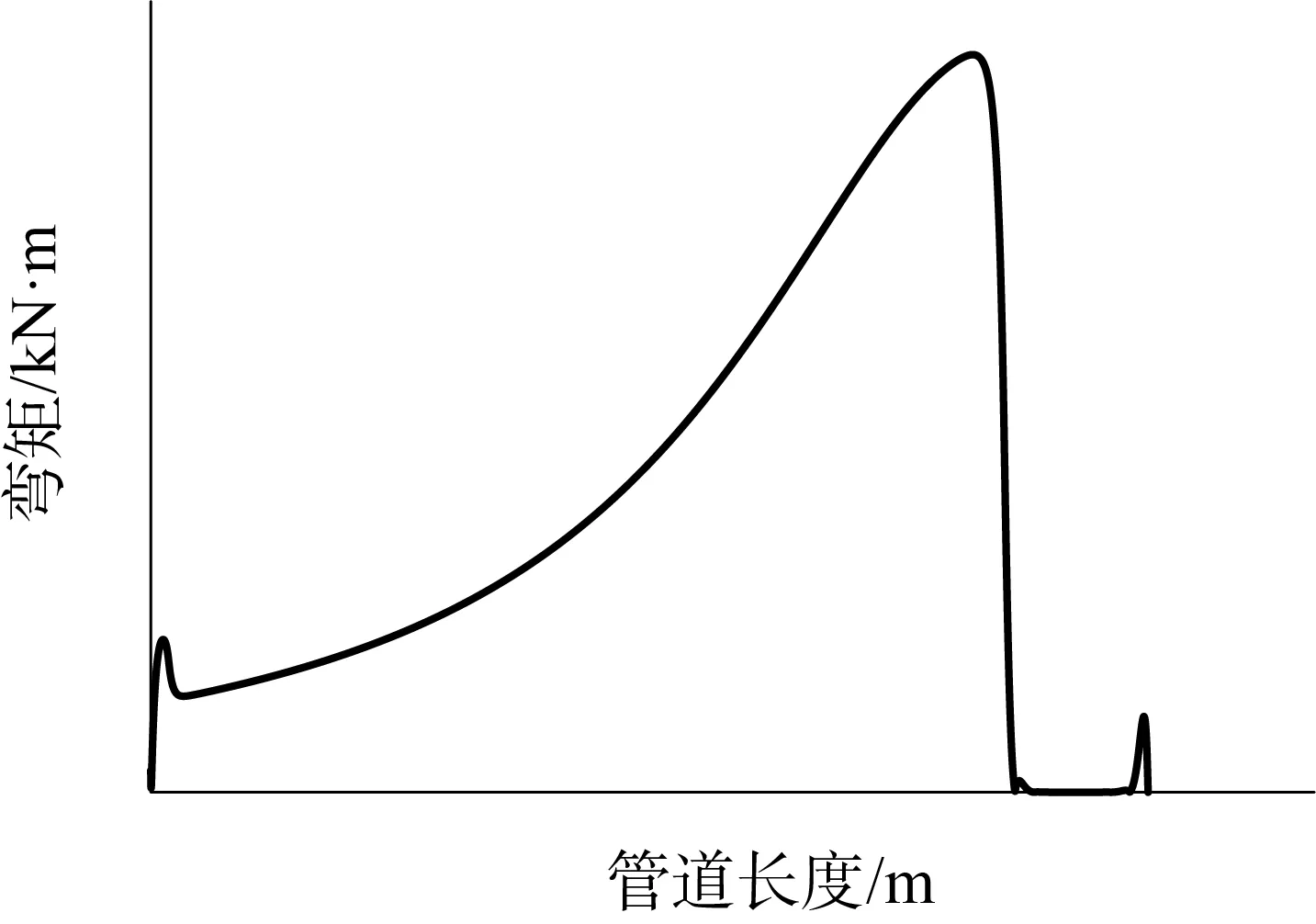
圖6 管道彎矩Fig.6 Bend moment along pipeline
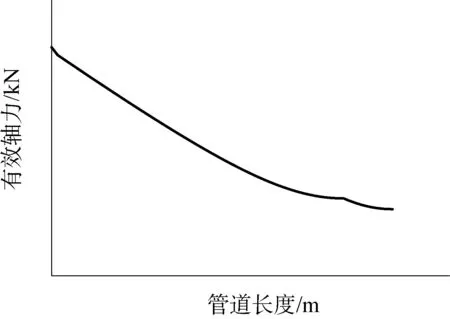
圖7 管道軸力Fig.7 Effective force along pipeline
影響管道靜態強度的主要因素包括PHS的傾斜角度、PLET重心位置以及PLET與A/R纜連接形式(吊耳或Yoke)等;由于假設管頂彎曲剛度無限大,應找到適宜的PHS傾斜角,使管頂彎矩達到最小;在一般情況下,PLET重心不在其幾何中心,這是由于PLET主結構上閥門、管道、結構鋼等無法完全對稱布置,而PLET重心與管道重心不共面,會在管頂產生附加彎矩;如PLET采用吊耳連接A/R纜,由于吊耳和管道共軸,對管頂附加彎矩較小。如采用Yoke吊裝,通常Yoke旋轉點與管道不同軸,管頂附加彎矩較大。
對PHS傾角、Yoke旋轉點和PLET偏心等影響管道強度的因素進行敏感性分析,以確定各因素對管道強度的影響程度。以靜態分析中的模型為基本工況,PHS傾角變化±2°和±1°,Yoke旋轉點相對于管軸線偏移±0.2 m, PLET偏心±0.2 m,計算結果如表3所示。可以看出,PHS傾角和Yoke旋轉點位置對管頂彎矩影響相對較大,PLET偏心對管頂彎矩影響相對較小。管道彎矩分布發生變化,最大值出現在管頂。在靜態工況下,管頂軸力主要由管重決定,對PHS傾角和PLET結構形式的變化不敏感。

表3 靜態敏感性分析結果
3.2.2 動態分析
動態分析的目的是確定可施工的環境條件窗口期。將波的離散角取30°,保守考慮波流共向。計算結果如表4所示,從結果可以看出,在波向/流向為120°時,管道應力已超過許用強度。對應的有義波高為2.5,譜峰周期為9 s。分析船舶RAO在120°方向,船舶橫搖(見圖8)峰值周期為9.186 s,與波周期很接近,船舶橫搖幅值幾乎達到峰值,使管道受力顯著地增加。
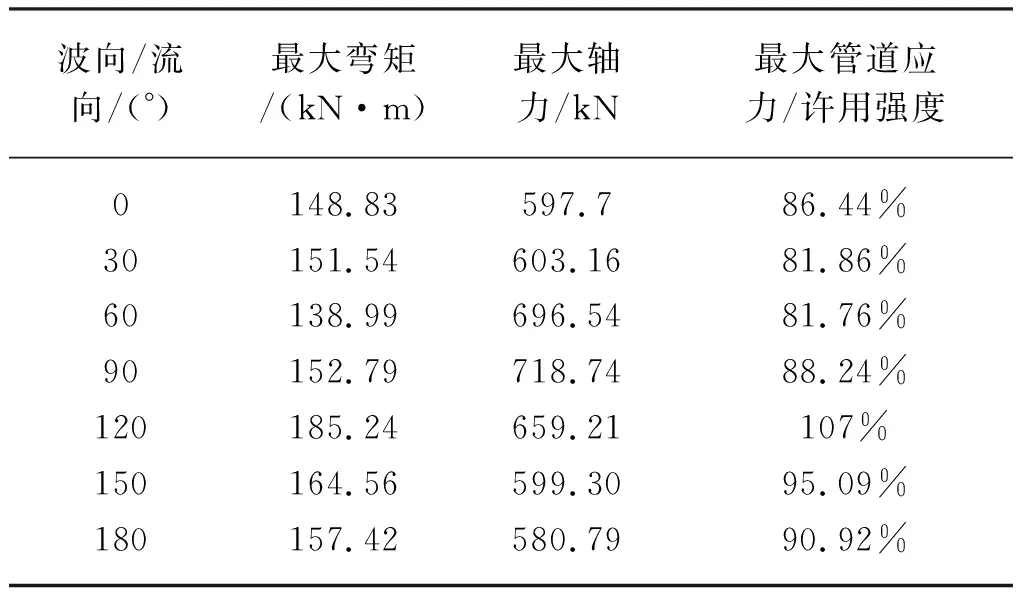
表4 懸掛狀態動態分析結果
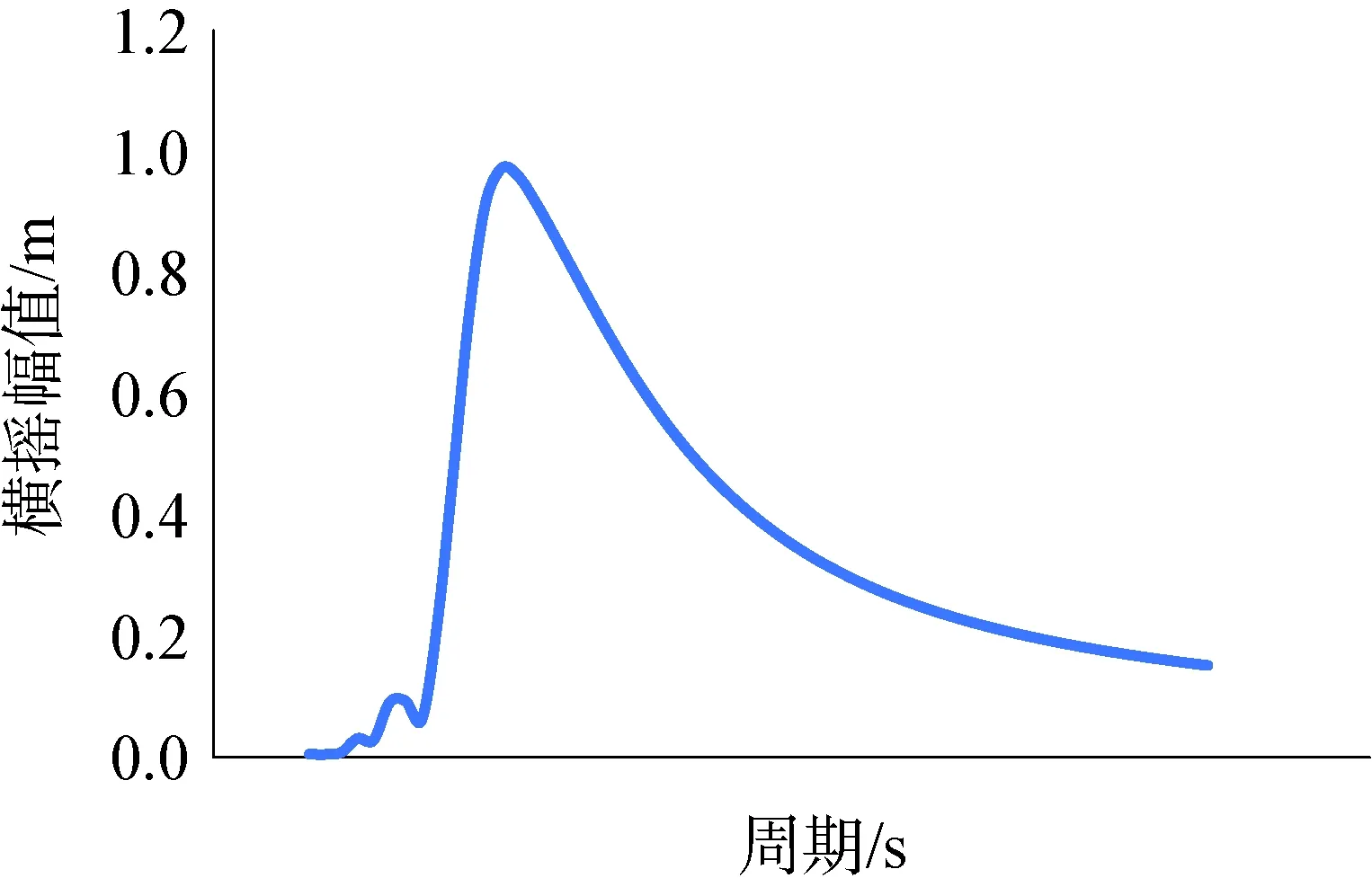
圖8 船舶橫搖幅值-120°方向Fig.8 Roll Amplitude of vessel at 120° direction
3.2.3 下放分析
下放過程是一個連續的過程,A/R纜釋放和船舶側移協同作業,以保證管道懸鏈線狀態可控。對下放過程進行動態分析,需把整個過程離散為若干個安裝步,對每個離散步進行靜態分析。篩選靜態分析結果,選擇控制工況進行動態分析。本文將下放過程離散為15個安裝步,如圖9所示。
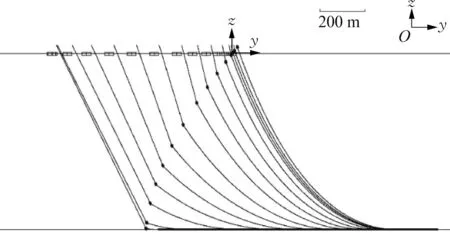
圖9 下放過程安裝步Fig.9 Lowering step
A/R纜釋放速度和船舶側移需要進行初步計算,以確定每個安裝步中船舶的側推位移。在南海某項目中,A/R纜釋放速度約為0.1~0.15 m/s。通過靜態分析找到適宜的船舶側推速度。本文取A/R纜下方速度為0.12 m/s,當船舶側推速度為0.11 m/s時,A/R纜張力曲線如圖10所示。可以看出,纜繩張力逐漸減小,整體平滑,存在兩次突變,分別為第3個離散步t=187 s時,由于PLET受到浮力作用,張力發生突變;第15個離散步t=7 136 s時,PLET放置在海床后,纜繩張力完全釋放。
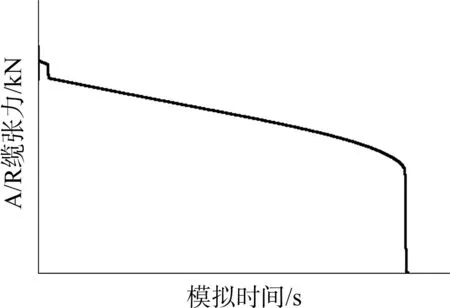
圖10 A/R纜張力Fig.10 A/R wire tension
下放過程的靜態分析結果如表5所示。A/R纜累計釋放長度為883 m,船舶累計側移為800 m。安裝步中的第1、第4和第14安裝步分別為開始下放、PLET入水后和PLET近海床。這三個安裝步是下放階段中的關鍵工況。對其進行動態分析,計算結果如表6所示。從計算結果可以看出,在第4個安裝步中,管道強度接近許用強度值。這是由于PLET完全入水后,波流和船體運動對PLET施加載荷最大,PLET運動傳遞至管道導致的。在第14個安裝步中,觸底區管道的最小軸力最小。這是由于隨著PLET接近海床,懸掛段管道長度較短,PLET運動導致管道出現軸向壓力。過大的管道軸向壓力,可能會引起管道屈曲。因此,可通過優化PLET重量、減小其水動力和運動幅值并適當增大A/R纜的張力等方法,避免管道出現軸向壓力。如表6所示,在第14步,船舶單步位移修改為120 m后,管道觸地區最小軸力為正。
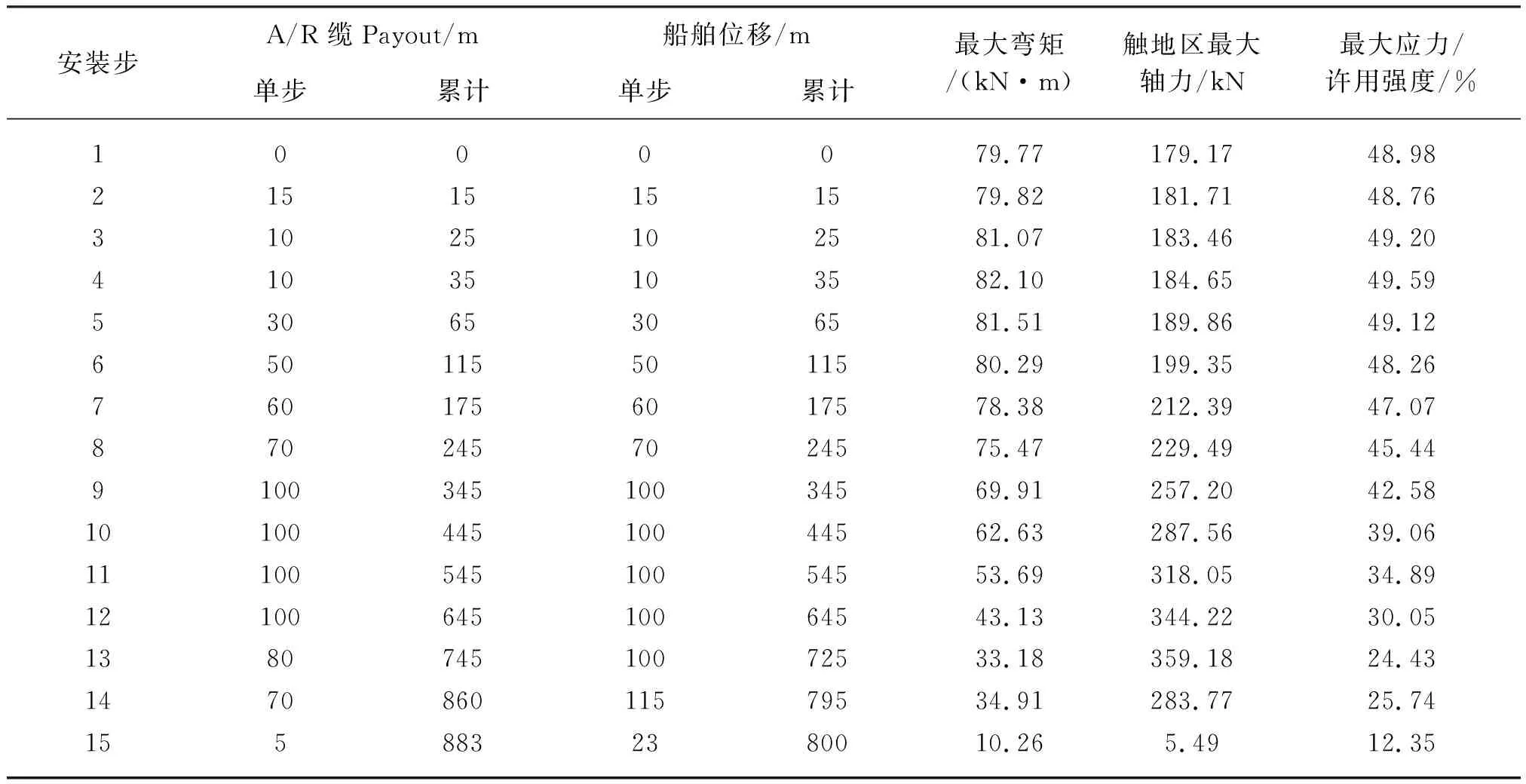
表5 下放過程靜態分析
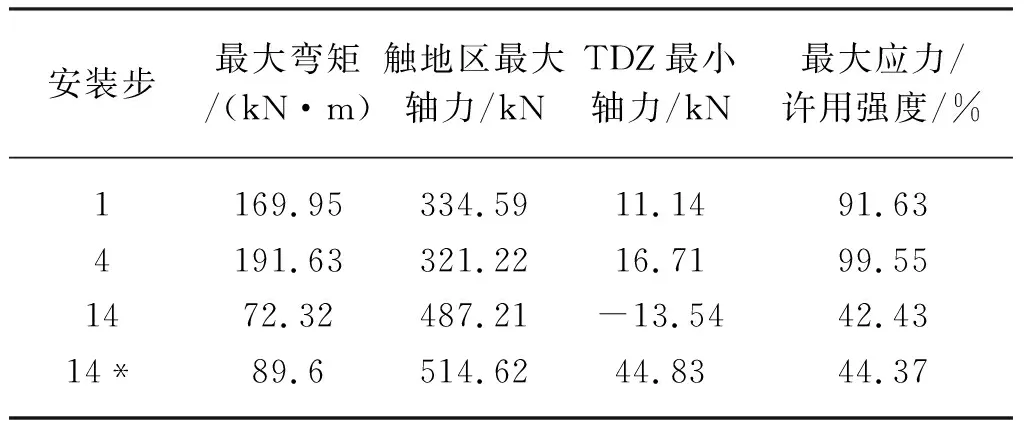
表6 下放過程動態分析
4 結 語
通過對PLET舷側安裝過程的研究,建立了耦合系統時域分析模型。對管道懸掛狀態和下放過程的計算表明:
(1) PHS的傾斜角度、PLET重心位置以及PLET與A/R纜連接形式(吊耳或Yoke)是影響管頂彎矩的主要因素。在設計過程中應找到適宜的PHS傾斜角、降低PLET偏心程度以及Yoke旋轉點與管軸的偏移距離,以減少靜態下管頂附加彎矩,使管道能承受更高的環境載荷。
(2) PLET舷側下放對船舶的橫搖敏感。在波流斜向作用下,當波浪周期與船舶橫搖周期接近時,管道受力顯著增加。因此,安裝過程中應避免在該海況下施工。
(3) 系統剛入水區,由于波流載荷和船體運動作用顯著,是整個下放過程的關鍵區。在該區域內,管道受力明顯高于深水區。
(4) PLET接近海床時,管道懸掛段長度較短,PLET運動對管道強度影響顯著。應確保A/R纜張力足夠,避免由于PLET運動導致管道出現軸向壓力。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22