淺談鋼結(jié)構(gòu)智能焊接的幾點思考
2020-07-10 18:07:22馬磊
科學(xué)與財富 2020年13期
關(guān)鍵詞:鋼結(jié)構(gòu)
馬磊

摘 要:隨著現(xiàn)代鋼結(jié)構(gòu)產(chǎn)品的需求變得日益多元化,為滿足生產(chǎn)和性能的需要,鋼結(jié)構(gòu)智能焊接已成為主要的發(fā)展方向。因此,本文以智能焊接機(jī)器人為載體,從剛性和柔性結(jié)構(gòu)智能機(jī)器人的概述入手,從初始焊位與引導(dǎo)、焊縫跟蹤處理、熔透實時控制三個方面進(jìn)行思考,以推動鋼結(jié)構(gòu)智能焊接水平技術(shù)的不斷提升和優(yōu)化。
關(guān)鍵詞:鋼結(jié)構(gòu);智能焊接;機(jī)器人
鋼結(jié)構(gòu)在國家建設(shè)中發(fā)揮了十分重要的作用,尤其是近年來隨著綠色建筑的不斷發(fā)展,對鋼結(jié)構(gòu)方面的需求量也在不斷增加。而焊接作為鋼結(jié)構(gòu)產(chǎn)品生產(chǎn)中的關(guān)鍵性環(huán)節(jié),為了確保滿足實際需求,降低人工成本,提高工程質(zhì)量等,需要加強(qiáng)智能焊接技術(shù)的發(fā)展。
1.剛性與柔性鋼結(jié)構(gòu)智能焊接機(jī)器人的分析
1.1剛性鋼結(jié)構(gòu)智能焊接機(jī)器人
對于大型的鋼結(jié)構(gòu)生產(chǎn)企業(yè),在鋼結(jié)構(gòu)件焊接時,不僅形狀復(fù)雜,而且工件壁較厚,加上焊縫形式較多,需要對其進(jìn)行全方位地焊接,導(dǎo)致勞動強(qiáng)度較大。因此,為滿足剛性鋼結(jié)構(gòu)智能焊接的需要,需要在實際需求中結(jié)合鋼結(jié)構(gòu)的特點針對性地設(shè)置焊接機(jī)器人。比如剛性鋼結(jié)構(gòu)具有厚度大、焊縫長和焊位多的特點,需要滿足其自動焊接的需要,就需要結(jié)合其實際特點,確保所選用的此類焊接機(jī)器人具有顯示焊縫軌跡、自動記憶焊接參數(shù)、多種焊接擺動控制方式,這樣才能在實際中結(jié)合需求對其參數(shù)進(jìn)行調(diào)節(jié)和優(yōu)化。
1.2柔性鋼結(jié)構(gòu)智能焊接機(jī)器人
柔性鋼結(jié)構(gòu)往往是特殊鋼材制作而成,在選用智能焊接機(jī)器人時,需要利用磁座在工件外表面或者內(nèi)表面上將機(jī)器人吸附,并確保與工件表面曲率相同,具有良好的柔性和便于裝卸,同時還能將焊縫軌跡在線顯示和記憶跟蹤,能在線全方位地對焊接參數(shù)進(jìn)行控制,實現(xiàn)離線焊接與參數(shù)設(shè)置等方面的智能化控制程序,從而達(dá)到內(nèi)外球面、直縫、漸變復(fù)雜曲面焊接的需要。
2.鋼結(jié)構(gòu)智能焊接的幾點思考
2.2鋼結(jié)構(gòu)智能化焊接中初始焊位和導(dǎo)引的思考
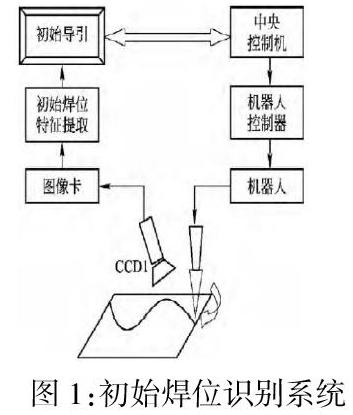
鋼結(jié)構(gòu)智能焊接機(jī)器人能在初始焊位于引導(dǎo)中發(fā)揮作用,才能滿足智能焊接的實際需要,也是智能焊接的關(guān)鍵技術(shù)之一。在實際應(yīng)用過程中,為確保其焊接質(zhì)量的達(dá)標(biāo),針對初始焊位的導(dǎo)引系統(tǒng)而言,其主要是利用機(jī)器人的視覺傳感功能,在工作空間中拍攝有關(guān)焊件的圖像,并通過圖像處理與立體匹配,基于三維空間的視角,提取焊縫初始點的三維坐標(biāo),并把結(jié)果向服務(wù)器傳送,而服務(wù)器則會對機(jī)器人的焊槍下達(dá)控制指令,達(dá)到初始焊位準(zhǔn)備焊接。在這一過程中,圖像卡發(fā)揮了十分重要的作用,也是決定導(dǎo)引的關(guān)鍵所在。因此,為確保機(jī)器人精準(zhǔn)操作,就必須加強(qiáng)視覺傳感器的應(yīng)用,切實提升機(jī)器人末端執(zhí)行器的工作精度,在研究物體位置時,主要是利用雙目立體視覺模型與圖像伺服控制算法來保證。這就需要我們在實際操作過程中,緊密結(jié)合視覺傳感器采集的有關(guān)工件的圖像數(shù)據(jù),對焊縫地起始點進(jìn)行精確識別與確定,并利用雙目立體視覺模型、圖像伺服控制算法,對采集對象實施三維立體定位。具體而言,就是利用立體視覺系統(tǒng)對物體進(jìn)行識別后建立相應(yīng)的物理模型,并采取模板匹配法來識別焊縫區(qū)域,并利用動態(tài)變區(qū)域模板來匹配,從而對焊接的出事位置進(jìn)行確定。而在初步定位的基礎(chǔ)上,在大范圍內(nèi)對場景圖像信息進(jìn)行分析后,對其大致位置進(jìn)行粗略計算,并控制機(jī)器人運動到目標(biāo)點的上方,通過重復(fù)取像和處理以及匹配與計算等一系列的操作,得出目標(biāo)點上的精確三維坐標(biāo)數(shù)據(jù),從而對機(jī)器人的運行進(jìn)行控制,實現(xiàn)對初始焊接位置的導(dǎo)引,具體過程詳見圖1。
2.2鋼結(jié)構(gòu)智能化焊接中焊縫跟蹤處理技術(shù)思考
為確保鋼結(jié)構(gòu)焊接質(zhì)量,在鋼結(jié)構(gòu)智能化焊接中,只有緊缺跟蹤焊縫,才能確保焊接質(zhì)量,也是自動化、智能化焊接的主要內(nèi)容。在焊縫跟蹤過程中,主要是在焊接全程對焊縫偏差進(jìn)行實時監(jiān)測,并對焊縫偏差進(jìn)行檢測,同時只要一有偏差,就能針對性地對焊接路徑與焊接參數(shù)進(jìn)行調(diào)整和優(yōu)化,從而達(dá)到保證焊接質(zhì)量的目的。在這一過程中,主要是利用焊縫跟蹤傳感器的作用,常見的有電弧傳感器與視覺傳感器,但是視覺傳感器比電弧傳感器更具有優(yōu)勢和潛力,所以需要加強(qiáng)對其的應(yīng)用。視覺傳感器主要是采用光電轉(zhuǎn)換元件,比如光電二極管,還有CCD等,尤其是CCD,不僅具有較為可靠的性能,而且體積較小,加上價格低廉,有著十分清晰的圖像,因此得到了廣泛地應(yīng)用。
因此,需要切實加強(qiáng)視覺傳感系統(tǒng)的應(yīng)用。常見的視覺傳感系統(tǒng)有兩種,一種是激光掃描式,還有一種是被動式。其中,激光掃描式為主動跟蹤系統(tǒng),從圖2可以看出,主動跟蹤系統(tǒng)從激光反射之后投射到焊縫的表面,再通過反射,此時CCD就能接收,并對反射光束與CCD主光軸之間的夾角進(jìn)行測量,再根據(jù)已經(jīng)得到的夾角和CCD與掃描鏡面間的距離數(shù)據(jù),最終得到焊縫端的剖面圖。而被動視覺法則是利用CCD的濾光片與減光片,對熔池邊的焊縫進(jìn)行觀測和分析,但是電弧經(jīng)常受到較為嚴(yán)重地干擾。
2.3鋼結(jié)構(gòu)智能化焊接中焊縫熔透實時控制思考
在鋼結(jié)構(gòu)智能化焊接過程中,焊縫熔透的實時控制也是確保智能化焊接質(zhì)量的關(guān)鍵所在。在實際應(yīng)用過程中,主要是借助熔透實時控制系統(tǒng)中的CCD提供的視覺信息,以及中央控制機(jī)與有關(guān)工藝參數(shù)預(yù)先建立焊接熔池的動態(tài)過程,對整個熔深和熔透以及熔寬和余高等焊接質(zhì)量參數(shù)進(jìn)行預(yù)測,并對焊接參數(shù)進(jìn)行針對性地調(diào)整和優(yōu)化,從而對機(jī)器人運動的速度和方向以及高度等進(jìn)行有效調(diào)控,動態(tài)掌握焊接熔池的實際情況,對整個焊接過程進(jìn)行實時監(jiān)測的同時達(dá)到智能化控制焊縫質(zhì)量的目的。例如在國家“鳥巢”體育館建設(shè)中,為達(dá)到保護(hù)鋼結(jié)構(gòu)焊接質(zhì)量的目的,采用實芯焊絲二氧化銻氣體保護(hù)焊的方式來進(jìn)行焊接,不僅能進(jìn)行橫向、立向和仰向焊接,而且還能實現(xiàn)智能化控制,對于工程質(zhì)量提出提升有著較大的保障。但是需要注意的是,當(dāng)前已經(jīng)進(jìn)入大數(shù)據(jù)時代,所以在智能化焊接中,需要我們切實加強(qiáng)鋼結(jié)構(gòu)焊接工藝大數(shù)據(jù)庫的建立,通過預(yù)設(shè)焊接條件,庫用數(shù)據(jù)庫命令、機(jī)器人自動動作進(jìn)行自動設(shè)定。但是航結(jié)構(gòu)產(chǎn)品類型較多,焊縫也不同,所以在焊接工藝上也具有多元化的特點,因此鋼結(jié)構(gòu)企業(yè)需要在機(jī)器人焊接技術(shù)方面不斷改進(jìn)和優(yōu)化,尤其是要根據(jù)鋼結(jié)構(gòu)產(chǎn)品特點,比如板厚、位置等設(shè)置工藝大數(shù)據(jù)庫,從而結(jié)合實際需求對其這些大數(shù)據(jù)進(jìn)行分析,強(qiáng)化對智能焊接技術(shù)的改進(jìn)和優(yōu)化,最終達(dá)到提高焊接工藝質(zhì)量的目的。
3.結(jié)語
綜上所述,雖然鋼結(jié)構(gòu)焊接技術(shù)目前得到了較為成熟,且發(fā)展速度較快,但是在發(fā)展過程中也出現(xiàn)了諸多問題,尤其是在智能制造方面的需求日益突出,需要在下料、組裝和焊接以及拼裝與涂裝最后到倉儲和運輸?shù)确矫鎸嵤┲悄芤惑w化的設(shè)計,這樣才能更好地促進(jìn)鋼結(jié)構(gòu)焊接技術(shù)的發(fā)展,尤其是在當(dāng)前的大數(shù)據(jù)時代下,需要切實利用大數(shù)據(jù)技術(shù)加強(qiáng)焊接工藝技術(shù)的分析和改進(jìn),才能不斷確保焊接質(zhì)量,最終達(dá)到提高鋼結(jié)構(gòu)產(chǎn)品品質(zhì)的目的。
參考文獻(xiàn):
[1]張華軍,陸漢忠,趙德龍,朱平,王達(dá). 焊接工藝對輪胎式集裝箱門式起重機(jī)軌道疲勞壽命的影響[J]. 起重運輸機(jī)械,2015(05):111-114.
[2]蔣力培,薛龍,鄒勇,張衛(wèi)義. 鋼結(jié)構(gòu)全位置焊接機(jī)器人的研究與開發(fā)[J]. 電焊機(jī),2017(08):23-26.
[3]曹成銘,李圣文,張延亮,任懷偉. 高端液壓支架智能焊接車間信息化建設(shè)探討[J]. 礦山機(jī)械,2018,41(01):104-106.
[4]蔣力培,薛龍. 全位置智能焊接機(jī)器人的研究[J]. 金屬加工(熱加工),2018(06):30-35.
猜你喜歡
建材發(fā)展導(dǎo)向(2022年14期)2022-08-19 02:10:10
建材發(fā)展導(dǎo)向(2022年14期)2022-08-19 02:08:18
山東冶金(2022年1期)2022-04-19 13:40:48
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:10:58
石油化工建設(shè)(2018年1期)2018-07-10 09:49:50
電站輔機(jī)(2017年3期)2018-01-31 01:46:40
中國公路(2017年15期)2017-10-16 01:31:54
物流技術(shù)與應(yīng)用(2017年3期)2017-05-17 05:29:07
發(fā)明與創(chuàng)新(2016年33期)2016-08-21 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:44
