基于神經(jīng)網(wǎng)絡(luò)的交通流時(shí)間序列預(yù)測(cè)
2020-07-09 21:26:25張帆
現(xiàn)代信息科技 2020年23期
摘 ?要:經(jīng)濟(jì)的發(fā)展,導(dǎo)致交通擁堵加劇,科學(xué)合理地解決交通相關(guān)的問題已成為一種全社會(huì)的共識(shí)。短期交通預(yù)測(cè)是一種直接估計(jì)未來短期交通狀況的過程。文章介紹了BP神經(jīng)網(wǎng)絡(luò)、RBF神經(jīng)網(wǎng)絡(luò)及其改進(jìn)算法,通過分析交通流量時(shí)間序列,使用BP神經(jīng)網(wǎng)絡(luò)、RBF神經(jīng)網(wǎng)絡(luò)進(jìn)行短時(shí)交通流預(yù)測(cè),并分析了在各種不同條件下的預(yù)測(cè)情況。
關(guān)鍵詞:BP神經(jīng)網(wǎng)絡(luò);RBF神經(jīng)網(wǎng)絡(luò);交通流量預(yù)測(cè)
中圖分類號(hào):TP183 ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2096-4706(2020)23-0087-04
Time Series Prediction of Traffic Flow Based on Neural Network
ZHANG Fan
(China Railway Eryuan Engineering Group Co.,Ltd.,Chengdu ?610031,China)
Abstract:With the development of economy,the traffic congestion is aggravating. It has become a consensus of the whole society to solve the traffic related problems scientifically and reasonably. Short-term traffic forecasting is the process of directly estimating the short-term traffic situation in the future. This paper introduces BP neural network,RBF neural network and their improved algorithm. By analyzing the time series of traffic flow,BP neural network and RBF neural network are used for short-term traffic flow prediction,and analyzing the forecasting situation under various conditions.
Keywords:BP neural network;RBF neural network;traffic flow forecast
0 ?引 ?言
近年來,交通擁堵、交通事故和交通污染越來越嚴(yán)重。在智能交通系統(tǒng)中,交通流量預(yù)測(cè)已成為重要的研究領(lǐng)域,其預(yù)測(cè)精度對(duì)智能交通系統(tǒng)的應(yīng)用十分關(guān)鍵。短期交通流量預(yù)測(cè)是一種根據(jù)歷史數(shù)據(jù),來估計(jì)近期未來數(shù)據(jù)的技術(shù)[1]。作者單位長期致力于研發(fā)智能交通系統(tǒng),作者有幸參與其中,研究交通流量的預(yù)測(cè)等部分。
本文運(yùn)用人工神經(jīng)網(wǎng)絡(luò)進(jìn)行交通流量數(shù)據(jù)的短期預(yù)測(cè)。結(jié)果表明,人工神經(jīng)網(wǎng)絡(luò)具有良好的預(yù)測(cè)效果。本文首先使用BP、RBF神經(jīng)網(wǎng)絡(luò),分別預(yù)測(cè)四個(gè)探測(cè)器后15分鐘的交通流量。其次比較分析了BP神經(jīng)網(wǎng)絡(luò)、RBF神經(jīng)網(wǎng)絡(luò)的改進(jìn)算法。然后將預(yù)測(cè)數(shù)據(jù)為5分鐘和10分鐘的結(jié)果進(jìn)行了對(duì)比。最后對(duì)兩步、四步、六步預(yù)測(cè)的結(jié)果進(jìn)行分析。
1 ?人工神經(jīng)網(wǎng)絡(luò)
人工神經(jīng)網(wǎng)絡(luò)中,信息處理的方向是從輸入層到各隱層再到輸出層逐層進(jìn)行。神經(jīng)網(wǎng)絡(luò)中一層的輸出是下一層的輸入,信息的處理具有逐層傳遞進(jìn)行的方向性,一般不存在反饋環(huán)路[1]。本文主要使用BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)對(duì)交通流進(jìn)行預(yù)測(cè)。
1.1 ?BP神經(jīng)網(wǎng)絡(luò)
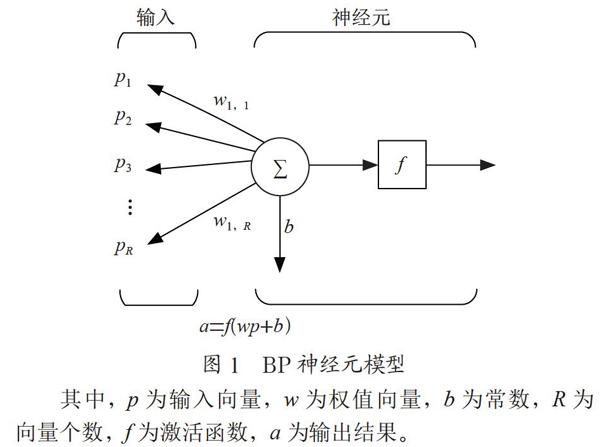
BP神經(jīng)網(wǎng)絡(luò)是由Rumelhart和Mccelland為首的科學(xué)家小組在1986年提出的,是一種按誤差反向傳播算法訓(xùn)練的多層前饋網(wǎng)絡(luò),其學(xué)習(xí)過程由信號(hào)的正向傳播與誤差的反向傳播兩個(gè)過程組成。此過程一直進(jìn)行到網(wǎng)絡(luò)輸出的誤差減少到可接受的程度,或進(jìn)行到預(yù)先設(shè)定的學(xué)習(xí)次數(shù)為止[1]。BP神經(jīng)元模型如圖1所示。
其中,p為輸入向量,w為權(quán)值向量,b為常數(shù),R為向量個(gè)數(shù),f為激活函數(shù),a為輸出結(jié)果。
BP算法的主要缺點(diǎn)是:收斂速度慢、存在局部極值、難以確定隱層和隱層節(jié)點(diǎn)個(gè)數(shù)[2]。在實(shí)際應(yīng)用中,BP算法很難勝任,因此出現(xiàn)了許多改進(jìn)算法,如有動(dòng)量的梯度下降法、有自適應(yīng)lr的梯度下降法、彈性梯度下降法、共軛梯度法、擬牛頓法、Levenberg-Marquardt訓(xùn)練法。
1.2 ?RBF神經(jīng)網(wǎng)絡(luò)
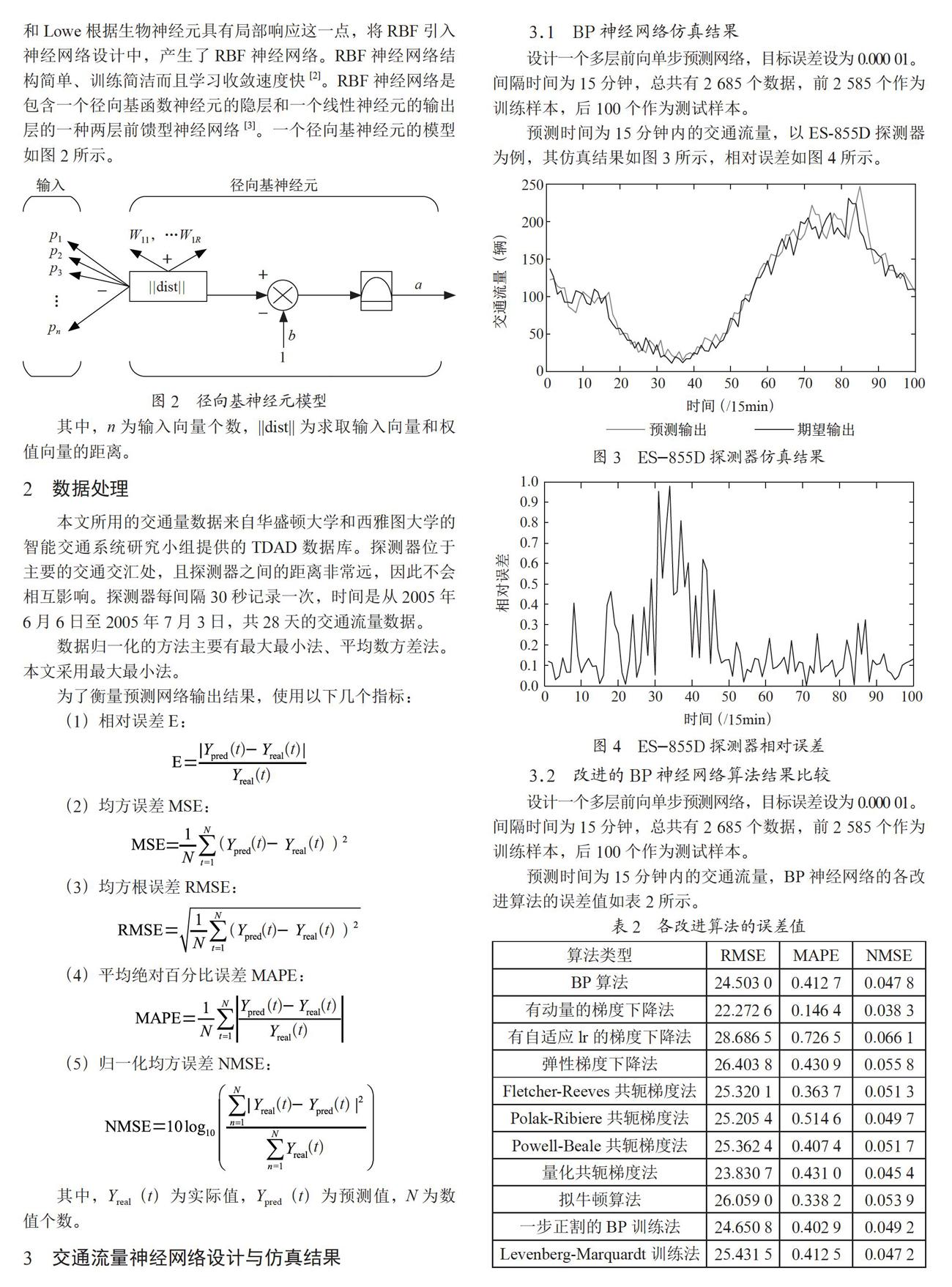
徑向基函數(shù)(Radical Basis Function,RBF)是多維空間插值的傳統(tǒng)技術(shù),由Powell于1985年提出。1988年,Broomhead和Lowe根據(jù)生物神經(jīng)元具有局部響應(yīng)這一點(diǎn),將RBF引入神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)中,產(chǎn)生了RBF神經(jīng)網(wǎng)絡(luò)。RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)簡單、訓(xùn)練簡潔而且學(xué)習(xí)收斂速度快[2]。RBF神經(jīng)網(wǎng)絡(luò)是包含一個(gè)徑向基函數(shù)神經(jīng)元的隱層和一個(gè)線性神經(jīng)元的輸出層的一種兩層前饋型神經(jīng)網(wǎng)絡(luò)[3]。一個(gè)徑向基神經(jīng)元的模型如圖2所示。
其中,n為輸入向量個(gè)數(shù),||dist||為求取輸入向量和權(quán)值向量的距離。
2 ?數(shù)據(jù)處理
本文所用的交通量數(shù)據(jù)來自華盛頓大學(xué)和西雅圖大學(xué)的智能交通系統(tǒng)研究小組提供的TDAD數(shù)據(jù)庫。探測(cè)器位于主要的交通交匯處,且探測(cè)器之間的距離非常遠(yuǎn),因此不會(huì)相互影響。探測(cè)器每間隔30秒記錄一次,時(shí)間是從2005年6月6日至2005年7月3日,共28天的交通流量數(shù)據(jù)。
數(shù)據(jù)歸一化的方法主要有最大最小法、平均數(shù)方差法。本文采用最大最小法。
為了衡量預(yù)測(cè)網(wǎng)絡(luò)輸出結(jié)果,使用以下幾個(gè)指標(biāo):
(1)相對(duì)誤差E:
(2)均方誤差MSE:
(3)均方根誤差RMSE:
(4)平均絕對(duì)百分比誤差MAPE:
(5)歸一化均方誤差NMSE:
其中,Yreal(t)為實(shí)際值,Ypred(t)為預(yù)測(cè)值,N為數(shù)值個(gè)數(shù)。
3 ?交通流量神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)與仿真結(jié)果
3.1 ?BP神經(jīng)網(wǎng)絡(luò)仿真結(jié)果
設(shè)計(jì)一個(gè)多層前向單步預(yù)測(cè)網(wǎng)絡(luò),目標(biāo)誤差設(shè)為0.000 01。間隔時(shí)間為15分鐘,總共有2 685個(gè)數(shù)據(jù),前2 585個(gè)作為訓(xùn)練樣本,后100個(gè)作為測(cè)試樣本。
預(yù)測(cè)時(shí)間為15分鐘內(nèi)的交通流量,以ES-855D探測(cè)器為例,其仿真結(jié)果如圖3所示,相對(duì)誤差如圖4所示。
3.2 ?改進(jìn)的BP神經(jīng)網(wǎng)絡(luò)算法結(jié)果比較
設(shè)計(jì)一個(gè)多層前向單步預(yù)測(cè)網(wǎng)絡(luò),目標(biāo)誤差設(shè)為0.000 01。間隔時(shí)間為15分鐘,總共有2 685個(gè)數(shù)據(jù),前2 585個(gè)作為訓(xùn)練樣本,后100個(gè)作為測(cè)試樣本。
預(yù)測(cè)時(shí)間為15分鐘內(nèi)的交通流量,BP神經(jīng)網(wǎng)絡(luò)的各改進(jìn)算法的誤差值如表2所示。
由表2可知,Levenberg-Marquardt訓(xùn)練法與其他改進(jìn)方法相比較,預(yù)測(cè)的精度較高,預(yù)測(cè)效果較為理想。另外,由實(shí)驗(yàn)可得,Levenberg-Marquardt訓(xùn)練法與BP算法相比較,訓(xùn)練網(wǎng)絡(luò)所用的時(shí)間較為短。
3.3 ?RBF神經(jīng)網(wǎng)絡(luò)算法仿真結(jié)果
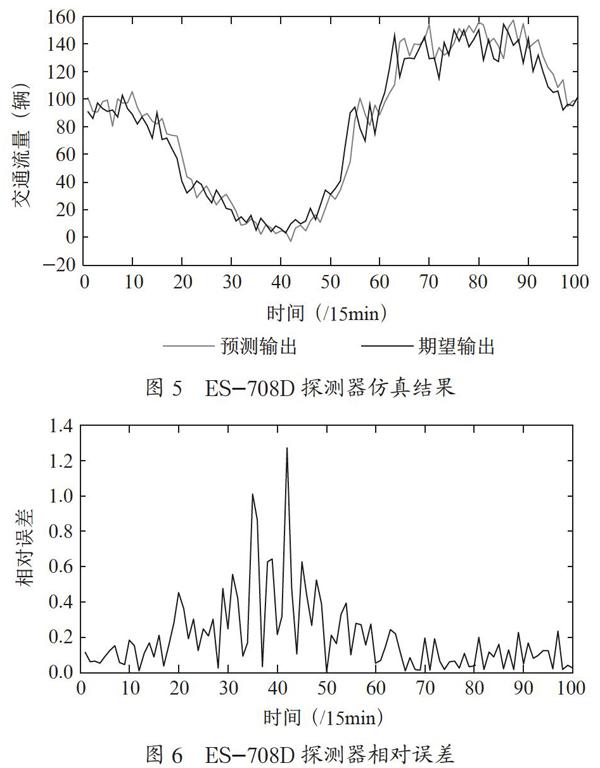
設(shè)計(jì)一個(gè)多層前向單步預(yù)測(cè)網(wǎng)絡(luò),訓(xùn)練精度設(shè)為0.02。間隔時(shí)間為15分鐘,總共有2 685個(gè)數(shù)據(jù),前2 585個(gè)作為訓(xùn)練樣本,后100個(gè)作為測(cè)試樣本。
預(yù)測(cè)時(shí)間為15分鐘內(nèi)的交通流量,其仿真結(jié)果如圖5所示,相對(duì)誤差如圖6所示。
3.4 ?改進(jìn)RBF神經(jīng)網(wǎng)絡(luò)算法仿真結(jié)果
設(shè)計(jì)一個(gè)多層前向單步預(yù)測(cè)網(wǎng)絡(luò)。間隔時(shí)間為15分鐘,總共有1 100個(gè)數(shù)據(jù),前1 000個(gè)作為訓(xùn)練樣本,后100個(gè)作為測(cè)試樣本。
預(yù)測(cè)時(shí)間為15分鐘內(nèi)的交通流量,不同網(wǎng)絡(luò)結(jié)構(gòu)誤差值如表3所示。
由表3可知,當(dāng)網(wǎng)絡(luò)嵌入維為10,隱含層神經(jīng)元個(gè)數(shù)為40時(shí),預(yù)測(cè)效果及精度較好。
3.5 ?不同預(yù)測(cè)時(shí)間間隔結(jié)果比較
下面用BP神經(jīng)網(wǎng)絡(luò)選取不同預(yù)測(cè)時(shí)間間隔進(jìn)行單步預(yù)測(cè)實(shí)驗(yàn),匯總為5分鐘、10分鐘、15分鐘的時(shí)間間隔,其中2 560組作為訓(xùn)練樣本,100組作為測(cè)試樣本。不同預(yù)測(cè)時(shí)間間隔誤差值如表4所示。
由表4可知,隨著預(yù)測(cè)時(shí)間間隔的增大,交通流預(yù)測(cè)效果變差,即與真值偏離程度較大,預(yù)測(cè)精度降低。出現(xiàn)這樣的情況是因?yàn)殡S著預(yù)測(cè)時(shí)間間隔變長,交通流的不確定性增加,非線性程度加大。
3.6 ?多步預(yù)測(cè)結(jié)果比較
本次實(shí)驗(yàn)采用直接多步預(yù)測(cè)。直接多步預(yù)測(cè)時(shí),由已知的前k個(gè)交通流數(shù)據(jù),可直接預(yù)測(cè)后面第q個(gè)數(shù)據(jù)[4]。本次實(shí)驗(yàn)進(jìn)行直接2步、4步、6步的預(yù)測(cè)。采用Levenberg-Marquardt訓(xùn)練法,網(wǎng)絡(luò)目標(biāo)誤差為0.000 01,網(wǎng)絡(luò)訓(xùn)練次數(shù)設(shè)為10 000次。間隔時(shí)間為15分鐘,總共有2 100個(gè)數(shù)據(jù),前2 000個(gè)作為訓(xùn)練樣本,后100個(gè)作為測(cè)試樣本。
預(yù)測(cè)時(shí)間為15分鐘內(nèi)的交通流量,直接2步、4步、6步的誤差值如表5所示。
由表5可知,隨著直接預(yù)測(cè)步數(shù)的增加,預(yù)測(cè)精度降低,即與真值偏差較大,預(yù)測(cè)效果較差。這是由于預(yù)測(cè)步數(shù)增加,交通流量的非線性程度較大,其規(guī)律性不強(qiáng),難以預(yù)測(cè)。
4 ?結(jié) ?論
交通流量的預(yù)測(cè)具有隨機(jī)性和高度非線性,不易進(jìn)行長期的交通流預(yù)測(cè),故本文主要研究了短時(shí)交通流的預(yù)測(cè)。對(duì)于智能交通系統(tǒng)而言,重點(diǎn)就是短時(shí)交通流預(yù)測(cè)的精確度。本文使用BP、RBF神經(jīng)網(wǎng)絡(luò)進(jìn)行短時(shí)交通流的預(yù)測(cè)。通過改變神經(jīng)網(wǎng)絡(luò)的訓(xùn)練次數(shù)、訓(xùn)練精度、學(xué)習(xí)率、嵌入維數(shù)及散布常數(shù),來提高神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)的精確度大小。對(duì)建模和預(yù)測(cè)短時(shí)交通流來說,人工神經(jīng)網(wǎng)絡(luò)是一種預(yù)測(cè)效果較好的方法。本文只考慮了正常情況下的交通流量預(yù)測(cè),還可以在考慮天氣狀況等因素后進(jìn)行交通流量的預(yù)測(cè)。
參考文獻(xiàn):
[1] 韓力群.智能控制理論及應(yīng)用 [M].北京:機(jī)械工業(yè)出版社,2007.
[2] 王小川,史峰,郁磊.MATLAB神經(jīng)網(wǎng)絡(luò)43個(gè)案例分析 [M].北京:北京航空航天大學(xué)出版社,2013.
[3] 喻宗泉,喻晗.神經(jīng)網(wǎng)絡(luò)控制 [M].西安:西安電子科技大學(xué)出版社,2009.
[4] 李松,劉力軍,翟曼.改進(jìn)粒子群算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的短時(shí)交通流預(yù)測(cè) [J].系統(tǒng)工程理論與實(shí)踐,2012,32(9):2045-2049.
作者簡介:張帆(1995—),女,漢族,甘肅張掖人,助理工程師,碩士研究生,研究方向:交通運(yùn)輸。
