基于歐拉角與微元分析的六自由度機械平臺運動模型
2020-07-04 04:27:40胡璠樊
機電信息 2020年14期
摘要:對六自由度機械平臺的運動進行了研究,引入歐拉角描述平臺的運動姿態(tài)和方向,將抽象的運動用具體的數(shù)值組合進行量化,并結(jié)合旋轉(zhuǎn)矩陣建立動態(tài)歐拉角模型。取ZYX的歐拉角組合進行實例演算,給出了支桿長度隨位移變化和傾角變化的關系圖像。
關鍵詞:機械平臺;動態(tài)歐拉角模型;旋轉(zhuǎn)矩陣
1 問題重述
六自由度機械平臺由6根帶伺服電動缸(或液壓裝置)的支桿、上下2個平臺以及上下各6只萬向節(jié)(或球面副)組成。下平臺固定在基礎設施上,通過6根支桿的伸縮運動,控制上平臺在空間6個自由度運動,即三維空間的X、Y、Z軸方向的運動以及分別繞X、Y、Z軸旋轉(zhuǎn)的運動。
通過驅(qū)動支桿伸縮運動,六自由度機械平臺可以實現(xiàn)上平臺姿態(tài)變化。該機械平臺具有并聯(lián)結(jié)構(gòu),即6個驅(qū)動器共同作用于一個平臺。這種設計優(yōu)化了系統(tǒng)剛度,承載能力強,且位置誤差不累計,但相較于串聯(lián)設計,其驅(qū)動方式也更為復雜。我們假設上平臺在初始狀態(tài)下與下平臺平行,通過對該機械平臺做適當?shù)暮喕图僭O,建立數(shù)學模型,在保持上平臺初始中心位置不變的情況下,能給出平臺向任意方向傾斜某一角度時6根支桿的長度隨傾角變化情況。
2 問題分析
在上平臺初始中心位置不變的情況下,六自由度機械平臺進行任意角度的傾斜,于是我們以上平臺初始中心位置為原點建立空間直角坐標系。引入歐拉角模型,通過旋轉(zhuǎn)矩陣計算,描述上平臺向任意方向傾斜某一角度時6根支桿的長度隨傾角變化的情況。
3 模型假設
(1)假設上下平面短邊所對的圓心角的度數(shù)相同。
(2)假設上平面中心質(zhì)點在平移時做勻速直線運動。
(3)假設上平臺繞不同軸轉(zhuǎn)動的角速度相同。
4 模型建立
4.1 ? ?六自由度機械平臺的結(jié)構(gòu)及參數(shù)
首先,我們將模型簡化成一個圓臺,運動上平臺的6個萬向節(jié)位于半徑為ra的圓周上,6個萬向節(jié)與上平臺的交點記為Ai(i=1,2,…,6),在圓周上均勻分布;運動下平臺的6個萬向節(jié)位于半徑為rb的圓周上,將其與下平臺的交點記為Bi(i=1,2,…,6),在圓周上均勻分布。選取坐標系OXYZ的坐標原點為上平臺外接圓圓心,并固定在上平臺上。運動平臺的初始高度(上下平臺間的垂直距離)為h。
4.2 ? ?歐拉角的引入
由于歐拉角非常適用于描述物體的姿態(tài)和方向,故在此利用歐拉角討論支桿的長度隨傾角變化的情況。
平臺向任意方向傾斜某一角度可以分解為3個過程:先繞某一軸旋轉(zhuǎn)γ角,再繞某一軸旋轉(zhuǎn)β角,最后繞某一軸旋轉(zhuǎn)α角。因此,我們引入歐拉角動態(tài)模型。
轉(zhuǎn)動的排列順序不同就有不同的歐拉組合。其中,最具代表性的是ZYX與ZYZ,在此我們選用ZYX組合。
5 模型求解
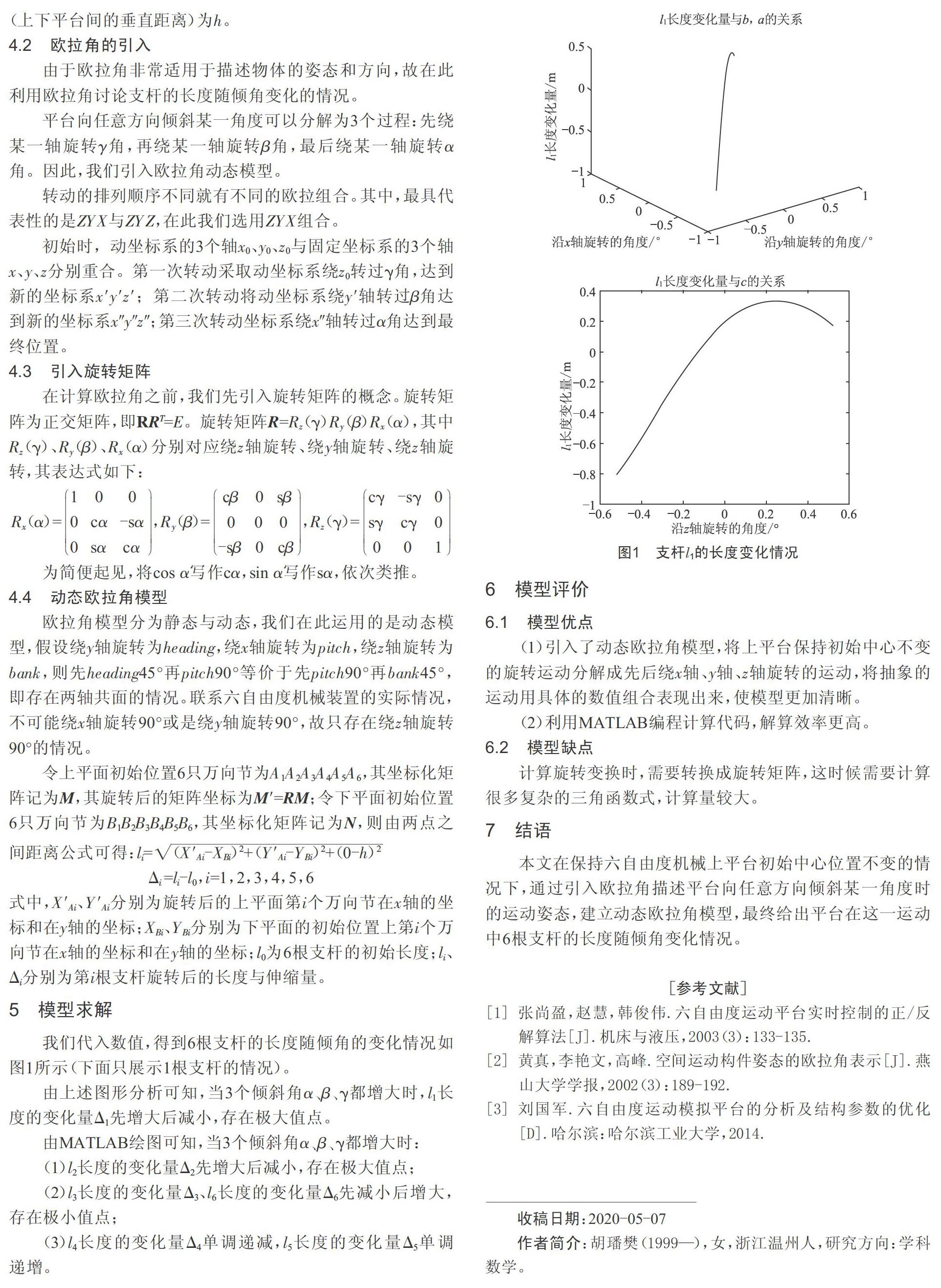
我們代入數(shù)值,得到6根支桿的長度隨傾角的變化情況如圖1所示(下面只展示1根支桿的情況)。
由上述圖形分析可知,當3個傾斜角α、β、γ都增大時,l1長度的變化量Δ1先增大后減小,存在極大值點。
由MATLAB繪圖可知,當3個傾斜角α、β、γ都增大時:
(1)l2長度的變化量Δ2先增大后減小,存在極大值點;
(2)l3長度的變化量Δ3、l6長度的變化量Δ6先減小后增大,存在極小值點;
(3)l4長度的變化量Δ4單調(diào)遞減,l5長度的變化量Δ5單調(diào)遞增。
6 模型評價
6.1 ? ?模型優(yōu)點
(1)引入了動態(tài)歐拉角模型,將上平臺保持初始中心不變的旋轉(zhuǎn)運動分解成先后繞x軸、y軸、z軸旋轉(zhuǎn)的運動,將抽象的運動用具體的數(shù)值組合表現(xiàn)出來,使模型更加清晰。
(2)利用MATLAB編程計算代碼,解算效率更高。
6.2 ? ?模型缺點
計算旋轉(zhuǎn)變換時,需要轉(zhuǎn)換成旋轉(zhuǎn)矩陣,這時候需要計算很多復雜的三角函數(shù)式,計算量較大。
7 結(jié)語
本文在保持六自由度機械上平臺初始中心位置不變的情況下,通過引入歐拉角描述平臺向任意方向傾斜某一角度時的運動姿態(tài),建立動態(tài)歐拉角模型,最終給出平臺在這一運動中6根支桿的長度隨傾角變化情況。
[參考文獻]
[1] 張尚盈,趙慧,韓俊偉.六自由度運動平臺實時控制的正/反解算法[J].機床與液壓,2003(3):133-135.
[2] 黃真,李艷文,高峰.空間運動構(gòu)件姿態(tài)的歐拉角表示[J].燕山大學學報,2002(3):189-192.
[3] 劉國軍.六自由度運動模擬平臺的分析及結(jié)構(gòu)參數(shù)的優(yōu)化[D].哈爾濱:哈爾濱工業(yè)大學,2014.
收稿日期:2020-05-07
作者簡介:胡璠樊(1999—),女,浙江溫州人,研究方向:學科數(shù)學。
