基于sEMG的人體上肢動(dòng)作特征提取與識(shí)別分類的實(shí)驗(yàn)研究
2020-07-04 02:27:37陳健寧劉蓉
智能計(jì)算機(jī)與應(yīng)用 2020年3期
關(guān)鍵詞:特征提取
陳健寧 劉蓉
摘要:本文以人體上肢動(dòng)作的sEMG信號(hào)為例,提出了基于Noraxon無線表面肌電系統(tǒng)采集不同運(yùn)動(dòng)范式肌電信號(hào),并對(duì)采集的信號(hào)進(jìn)行特征提取和基于支持向量機(jī)算法的分類。經(jīng)過實(shí)踐測(cè)試,支持向量機(jī)算法可以很好地適應(yīng)上肢康復(fù)訓(xùn)練所要求的動(dòng)作分類要求,為上肢自主康復(fù)訓(xùn)練系統(tǒng)設(shè)計(jì)提供了分類算法支撐。
關(guān)鍵詞: sEMG信號(hào)處理; 特征提取; 識(shí)別分類
【Abstract】 Taking the sEMG signal of human upper limb motion as an example, this paper proposes collecting different motion paradigm EMG signals based on the Noraxon wireless surface electromyography system, and performing feature extraction and classification based on support vector machine algorithm for the collected signals. After practical tests, the support vector machine algorithm can well adapt to the movement classification requirements of upper limb rehabilitation training, and provides a classification algorithm support for the design of an upper limb autonomous rehabilitation training system.
【Key words】 ?sEMG signal processing; feature extraction; recognition classification
0 引 言
表面肌電信號(hào)(sEMG)屬于非侵入式采集方式,相對(duì)于侵入式采集(如針電極EMG)來說具有無創(chuàng)傷、操作靈活、易于采集,有利于肢患病人利用獲取的表面肌電信號(hào)特征信息,實(shí)現(xiàn)有意識(shí)、有目的的運(yùn)動(dòng)康復(fù)。如何針對(duì)其采集數(shù)據(jù)進(jìn)行特征提取和識(shí)別分類將直接影響肢體受損患者的自主康復(fù)訓(xùn)練效果。因此隨著人工智能與傳統(tǒng)信號(hào)檢測(cè)技術(shù)的深度融合,基于sEMG的特征分類方法的研究與應(yīng)用已經(jīng)成為生物醫(yī)學(xué)工程領(lǐng)域關(guān)注的熱點(diǎn)問題。
1 上肢動(dòng)作肌電信號(hào)的采集與處理實(shí)驗(yàn)方案設(shè)計(jì)
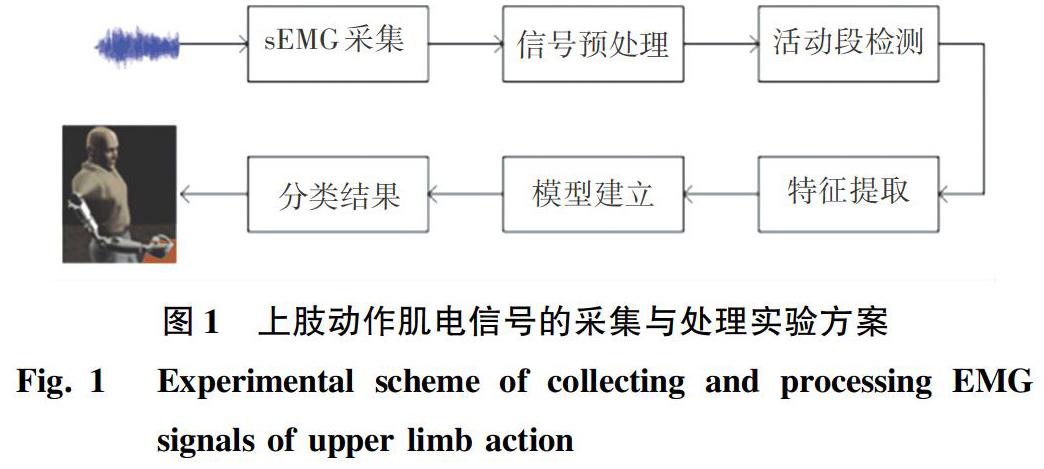
本實(shí)驗(yàn)設(shè)計(jì)思路按照采集、處理、識(shí)別與分析這條主線開展,其中sEMG信號(hào)采集主要借助Noraxon無線表面肌電系統(tǒng)來完成。獲得采集數(shù)據(jù)后,要對(duì)數(shù)據(jù)進(jìn)行軟件濾波和動(dòng)作起始點(diǎn)檢測(cè)的預(yù)處理,這一步驟對(duì)于接下來的特征提取和識(shí)別分類至關(guān)重要,是后續(xù)工作的基礎(chǔ)和支撐。具體實(shí)驗(yàn)方案設(shè)計(jì)如圖1所示。
2 基于上肢動(dòng)作狀態(tài)的sEMG信號(hào)采集與預(yù)處理
2.1 上肢關(guān)節(jié)運(yùn)動(dòng)模式定義
本實(shí)驗(yàn)從對(duì)上肢康復(fù)訓(xùn)練普適性角度出發(fā),引用了Sign Language庫中常用肢體動(dòng)作定義,對(duì)實(shí)驗(yàn)中的上肢動(dòng)作進(jìn)行動(dòng)作模式設(shè)定,具體名稱和表述見表1[1]。這種設(shè)定既考慮了涵蓋盡量多的肌肉群,同時(shí)也兼顧了中風(fēng)、腦癱等部分特殊群體的康復(fù)需求。
2.2 上肢動(dòng)作sEMG信號(hào)采集
本實(shí)驗(yàn)肌電信號(hào)采集使用的前文所提的Noraxon無線表面肌電系統(tǒng),采樣速率參數(shù)設(shè)置為1 500 Hz。每一肌電通道的2個(gè)Ag/Ag Cl電極的間距是 2 cm。在使用前,先用酒精清洗。在肌電數(shù)據(jù)采集開始之前,向每位受試者展示每一個(gè)標(biāo)準(zhǔn)動(dòng)作的樣片,并告知盡量用恒定的力量完成每一個(gè)動(dòng)作。在受試者熟悉任務(wù)后,自行練習(xí)受試的動(dòng)作和熟悉流程,保證數(shù)據(jù)采集的合理性。每次動(dòng)作采集均從IS狀態(tài)選擇開始,表1中所列的各運(yùn)動(dòng)模式作為一次動(dòng)作的結(jié)束狀態(tài)。
2.3 sEMG信號(hào)預(yù)處理
盡管肌電信號(hào)采集儀在信號(hào)輸出前對(duì)采集到的信號(hào)做了硬件降噪和軟件去噪處理,但sEMG信號(hào)易受手臂震顫、靜電和工頻等外界因素干擾。在特征提取之前,需要對(duì)獲得的sEMG信號(hào)進(jìn)行預(yù)處理。
這里擬對(duì)要進(jìn)行特征提取的信號(hào)進(jìn)行帶通濾波和50 Hz工頻陷波,帶通濾波器主要為了濾除20 Hz以下和500 Hz以上的干擾,主要采用高階巴特特沃斯數(shù)字濾波器來實(shí)現(xiàn)。
3 上肢動(dòng)作sEMG信號(hào)特征提取
3.1 基于sEMG信號(hào)的上肢動(dòng)作起始點(diǎn)檢測(cè)
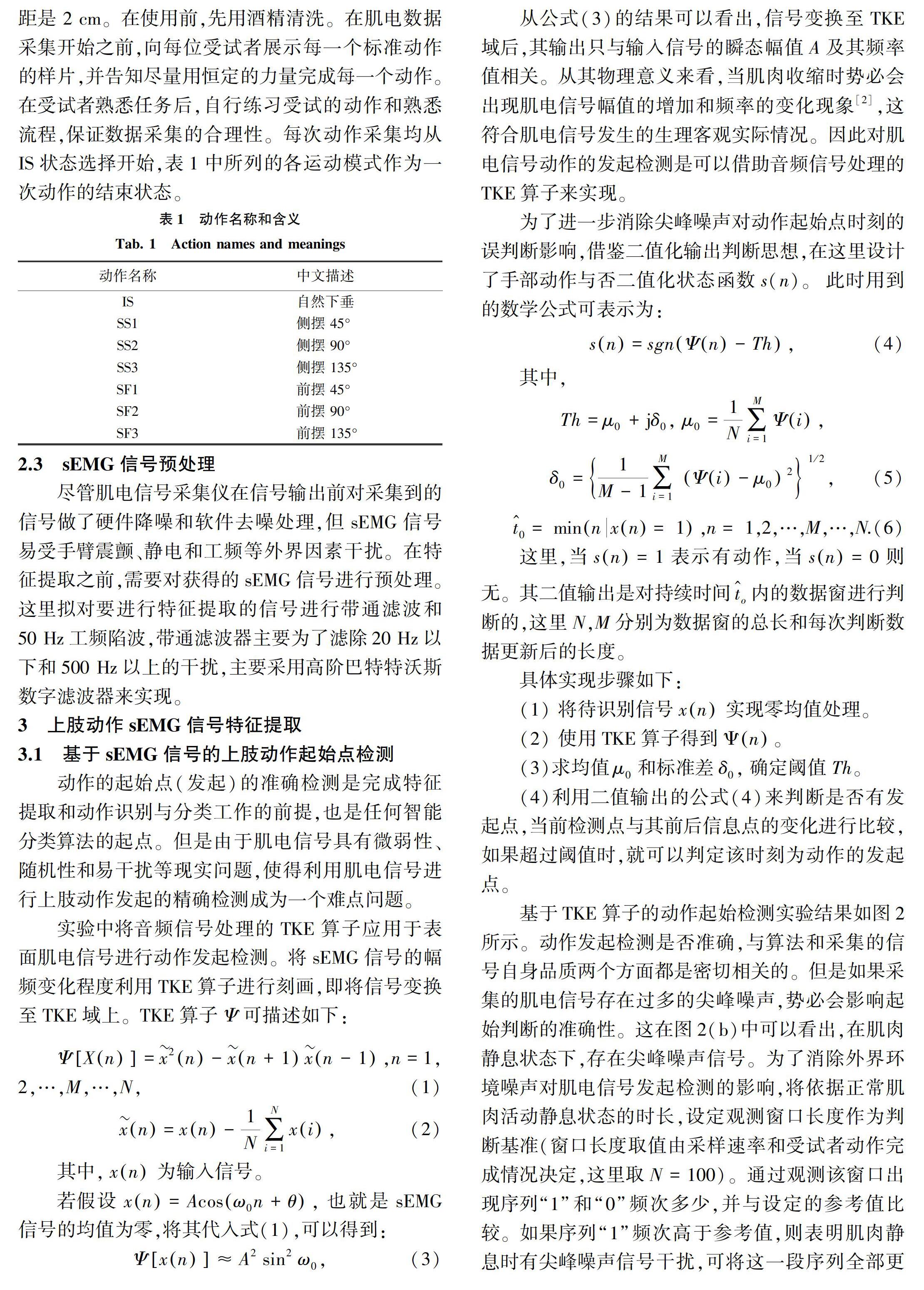
動(dòng)作的起始點(diǎn)(發(fā)起)的準(zhǔn)確檢測(cè)是完成特征提取和動(dòng)作識(shí)別與分類工作的前提,也是任何智能分類算法的起點(diǎn)。但是由于肌電信號(hào)具有微弱性、隨機(jī)性和易干擾等現(xiàn)實(shí)問題,使得利用肌電信號(hào)進(jìn)行上肢動(dòng)作發(fā)起的精確檢測(cè)成為一個(gè)難點(diǎn)問題。
6 結(jié)束語
本實(shí)驗(yàn)從上肢運(yùn)動(dòng)sEMG信號(hào)采集出發(fā),經(jīng)信號(hào)預(yù)處理、動(dòng)作起始點(diǎn)判斷及特征提取,并采用了泛化能力較強(qiáng)的SVM方法進(jìn)行了訓(xùn)練和分類,較好地反映了采集的表面肌電信號(hào)和上肢動(dòng)作特征提取與識(shí)別之間的客觀映射關(guān)系,與表面肌電信號(hào)的生理特征是一致的,為后續(xù)開展用上肢肌電信號(hào)驅(qū)動(dòng)外骨骼式自主康復(fù)訓(xùn)練奠定了理論基礎(chǔ)。
參考文獻(xiàn)
[1] 董海清,王朋,祈蒙,等. 基于表面肌電信號(hào)的上肢康復(fù)訓(xùn)練技術(shù)研究[J]. 儀表技術(shù)應(yīng)用,2017(9):17.
[2]趙漫丹,李東旭,范才智,等. 基于表面肌電信號(hào)進(jìn)行手部動(dòng)作發(fā)起檢測(cè)方法[C]//中國電子學(xué)會(huì)電路與系統(tǒng)學(xué)會(huì)第二十五屆年會(huì). 成都:中國電子學(xué)會(huì)電路與系統(tǒng)學(xué)會(huì),2016:1.
[3]陳歆普. 基于肌電信號(hào)的多模式人機(jī)接口研究[D]. 上海:上海交通大學(xué), 2011.
[4]李林偉,王紅旗,姜磊. 基于支持向量機(jī)的表面肌電信號(hào)動(dòng)作模式識(shí)別[J]. 科學(xué)技術(shù)與工程,2014,14(7):241.
猜你喜歡
艦船科學(xué)技術(shù)(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動(dòng)化學(xué)報(bào)(2017年7期)2017-04-18 13:41:09
自動(dòng)化學(xué)報(bào)(2017年11期)2017-04-04 02:52:58
中國生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38
計(jì)算機(jī)工程(2015年4期)2015-07-05 08:28:02
機(jī)電信息(2015年3期)2015-02-27 15:54:46
機(jī)械工程師(2015年10期)2015-02-02 01:13:49
