基于有限范圍內自發光特征物的機器人雙目定位研究
2020-07-04 02:27:37王強王國慶楊康梁思瑞王明圣
智能計算機與應用 2020年3期
王強 王國慶 楊康 梁思瑞 王明圣

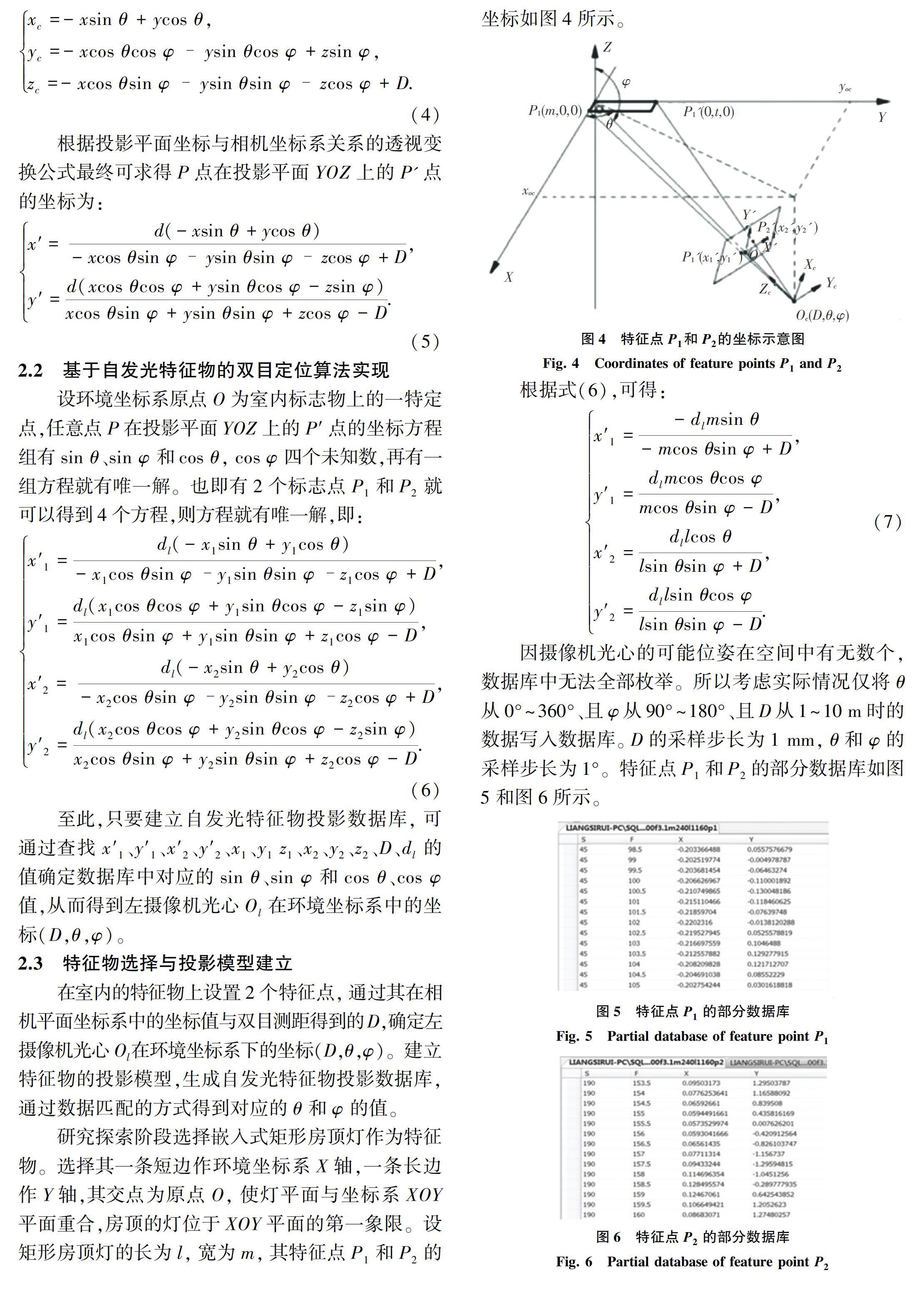
摘要:針對室內光照多變對機器視覺帶來的不良影響所造成的室內機器人難定位的問題,提出了基于固定自發光特征物的雙目定位算法設計,實現了機器人在室內環境中的定位。針對視覺定位算法實時性不高、處理數據量大的問題,通過預先建立數據庫的方法避開復雜的計算,提高了視覺定位速度。具體而言,建立了固定特征物投影模型,實現了特征物模型的建立和對應數據庫的生成,將特征點像素坐標與投影平面坐標進行匹配,并將相機在環境坐標系中的位姿轉換為運動平臺在環境坐標系中的位姿,實現了運動平臺在室內環境中的定位。最終經過測試,證明該方法是可行的。
關鍵詞: 室內移動機器人; 雙目定位; 自發光特征物; 雙目定位算法
【Abstract】 Aiming at the problem that indoor robots are difficult to locate due to the adverse effects of indoor illumination on machine vision, a binocular localization algorithm based on fixed self-luminous features is proposed, which realizes the localization of robots in indoor environment. Aiming at the problem of low real-time performance and large amount of data processing of visual localization algorithm, the method of pre-establishment of database avoids complex calculation and improves the speed of visual localization. Specifically, the projection model of fixed feature is established, the establishment of feature model and the generation of corresponding database are realized, the pixel coordinates of feature points are matched with the projection plane coordinates, and the pose of camera in the environment coordinate system is converted to that of the motion platform in the environment coordinate system, thus realizing location of indoor environment of the motion platform in the environment coordinate system. Finally, the test results show that the method is feasible.
【Key words】 ?indoor mobile robot; binocular localization; self-luminous feature; binocular localization algorithm
0 引 言
自主移動機器人是可依靠自身智能系統進行自主導航的在地面運動的機器人。文獻[1]中提出如何解決移動機器人“走”的問題一直是自主移動機器人領域所存在的問題。文獻[2]提出移動機器人實現自主運動的基礎就是實現其自身定位。文獻[3]提出在小型移動機器人的發展下,對其自主運動系統應該有更高的要求。文獻[4]提出大多數小型移動機器人需要通過傳感器感知其所處環境及自身位置。文獻[5]所述的“愛家一號”通過重復路徑來記憶路徑。文獻[6]中的Botlr的機器人管家,使用激光雷達和攝像機進行導航和定位。文獻[7]所述的移動機器人監控系統為機器人搭載多種模塊化傳感器,能感知機器人周圍環境。文獻[8]所述的CASIA-I輪式移動機器人,是在多傳感器信息融合的基礎上實現了自主定點移動和軌跡跟蹤的功能。
以上研究都取得了不同的進展,但是依然存在定位不精確等問題。室內環境的光照情況復雜,影響機器視覺的圖像采集和處理。所以,視覺定位在室內環境中的應用也受到了很大的限制。本次研究提出基于固定自發光特征物的雙目定位算法設計,可以解決光照情況復雜的問題,將特征物圖像與預先建立的數據庫進行數據匹配,確定機器人的實時位姿,以實現機器人在室內環境中的定位。
1 整體方案
根據周圍環境進行絕對定位,不存在累積誤差且精度高,并極力降低定位算法的復雜度。雙目攝像機安裝在運動平臺頂端,便于采集圖像。運動測試平臺機械結構三維模型圖如圖1所示。其中,雙目定位系統位于平臺的最上方。
通過采用攝像機采集室內自發光特征物圖像,并提取圖像中的特征物的特征,將特征與預先建立的數據庫進行數據匹配,確定機器人的實時位姿。
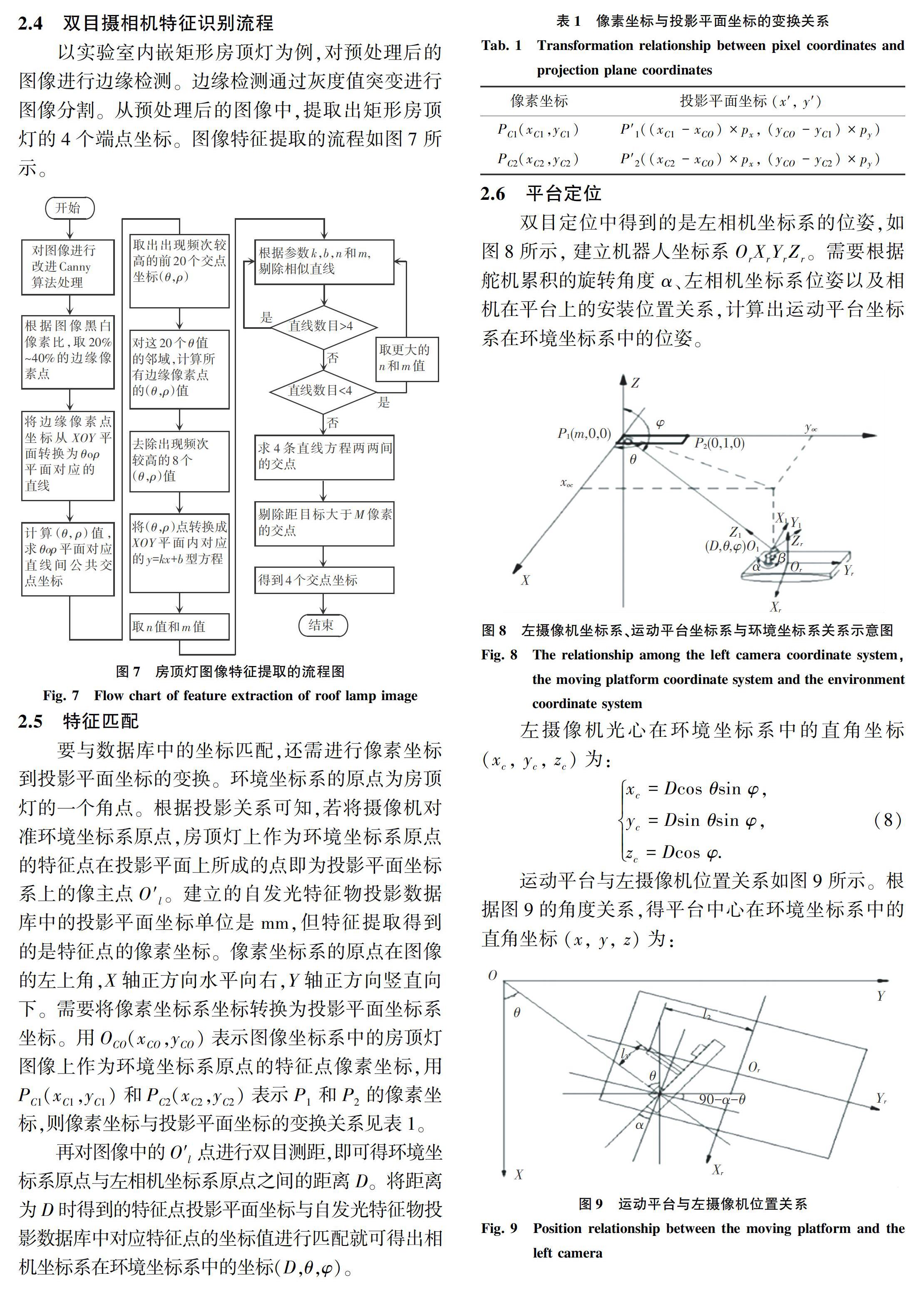
基于室內自發光特征物的雙目定位算法,可以解決室內光照情況復雜的問題,研究時將涉及算法的理論支撐、模型建立、數據庫建立、圖像處理、特征提取、特征匹配以及平臺定位等。基于自發光特征物的雙目定位算法流程如圖2所示。
首先根據左右攝像機得到周圍物體的圖像,將得到的圖像傳遞回來之后進行圖像矯正,經過左右兩個攝像機實現雙目定位。將攝像機得到的特征物上某些點的坐標與自發光特征物投影數據庫進行匹配,可以將左攝像機的坐標系轉化為機器人坐標系,進而實現移動機器人定位。
