機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2020-07-04 06:20:22任會(huì)麗凌云科技集團(tuán)有限責(zé)任公司
航空維修與工程 2020年4期
關(guān)鍵詞:系統(tǒng)
任會(huì)麗/凌云科技集團(tuán)有限責(zé)任公司
0 引言
飛機(jī)裝配時(shí),慣導(dǎo)托架、左右速率陀螺成品托架等的水平和軸線校準(zhǔn)都要求有很高的精度。目前的校準(zhǔn)是通過(guò)測(cè)微準(zhǔn)直望遠(yuǎn)鏡(CZW)、校準(zhǔn)靶板或光學(xué)象限儀來(lái)測(cè)試托架的傾斜度,從而判斷哪些支撐點(diǎn)需要抬高而添加墊片,但該方法無(wú)法測(cè)算出各個(gè)支撐點(diǎn)應(yīng)抬升的具體高度。另外,由于機(jī)載托架在水平和軸線方向具有很強(qiáng)的耦合性,調(diào)整任一方向都會(huì)影響另一個(gè)方向的調(diào)平精度[1],工作者需要反復(fù)添加墊片、測(cè)試數(shù)據(jù),直到托架在水平和軸線方向的傾斜誤差都達(dá)到某個(gè)范圍內(nèi)為止。這種校準(zhǔn)方法不僅精度較低且耗時(shí)、費(fèi)力,為了解決這些問(wèn)題,有必要設(shè)計(jì)一種高精度、高效率并且操作簡(jiǎn)單的成品托架水平和軸線校準(zhǔn)系統(tǒng)。
機(jī)載托架都是剛性的四點(diǎn)支撐平臺(tái)托架[1-3],為了使機(jī)載托架各支撐點(diǎn)在調(diào)平過(guò)程中只做單向運(yùn)動(dòng),本文運(yùn)用調(diào)平精度較高的“循環(huán)多次”最高點(diǎn)不動(dòng)調(diào)平方法[4],建立高精度機(jī)載托架校準(zhǔn)的靜力學(xué)數(shù)學(xué)模型。為了方便工作者的操作和使用,在建立高精度機(jī)載托架校準(zhǔn)的數(shù)學(xué)模型后,運(yùn)用VC 與Matlab 的COM 接口混合編程技術(shù)[5]開(kāi)發(fā)機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng),包括各個(gè)機(jī)載托架校準(zhǔn)模塊和可視化人機(jī)交互界面的開(kāi)發(fā),并對(duì)所建立的數(shù)學(xué)模型的可行性和穩(wěn)定性進(jìn)行機(jī)上驗(yàn)證。工作者只需要在該系統(tǒng)的主界面輸入利用工裝夾具測(cè)試的數(shù)據(jù),就可直接得到相應(yīng)機(jī)載托架的校準(zhǔn)信息,包括各個(gè)支撐點(diǎn)精確的抬升高度和托架平臺(tái)在各個(gè)方向的實(shí)時(shí)傾斜度。
1 機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)的設(shè)計(jì)
1.1 機(jī)載托架平臺(tái)靜力學(xué)建模
對(duì)機(jī)載托架平臺(tái)的動(dòng)態(tài)調(diào)節(jié)過(guò)程進(jìn)行數(shù)學(xué)分析,尋找平臺(tái)傾斜角與四個(gè)支撐點(diǎn)之間的定量關(guān)系。如圖1 所示,假設(shè)OX0Y0為水平坐標(biāo)系,OXY 為平臺(tái)所在的坐標(biāo)系,平臺(tái)相對(duì)于水平面的橫傾斜角(沿X 軸方向)和縱傾斜角(沿Y 軸方向)分別為α、β。由于機(jī)載托架平臺(tái)各支撐點(diǎn)在OXY 坐標(biāo)系中的坐標(biāo)是已知的,假定為(i,j,k),只要建立兩個(gè)坐標(biāo)系之間的坐標(biāo)變換矩陣,就可以很方便地求出各支撐點(diǎn)在水平坐標(biāo)系OX0Y0上的坐標(biāo)。
若α≠0、β=0,平臺(tái)坐標(biāo)(i,j,k)變換到水平坐標(biāo)系OX0Y0上的坐標(biāo)為(i′,j′,k′),則根據(jù)坐標(biāo)變換,可以得到

若α不變、β≠0,平臺(tái)坐標(biāo)(i,j,k)變換到水平坐標(biāo)系OX0Y0上的坐標(biāo)為(i0,j0,k0),則根據(jù)坐標(biāo)變換,可以得到
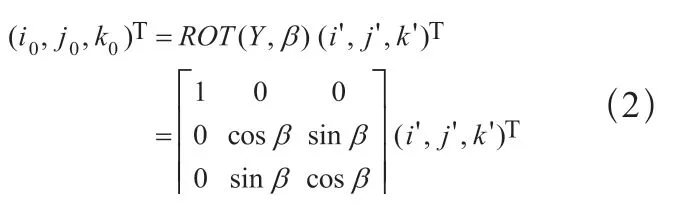
這樣,由α、β變換之后,初始的平臺(tái)坐標(biāo)變換成水平坐標(biāo)系OX0Y0上的坐標(biāo)(i0,j0,k0),將式(1)帶入式(2)得到
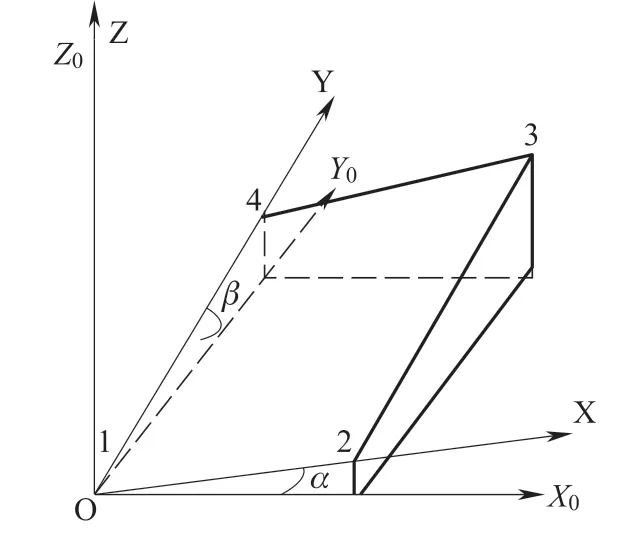
圖1 托架平臺(tái)傾斜示意圖

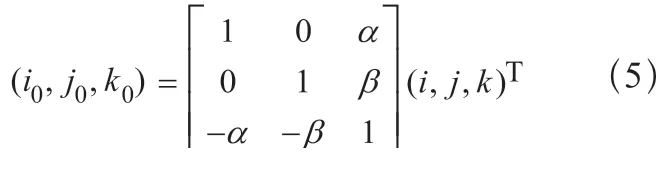
實(shí)際測(cè)得的試驗(yàn)數(shù)據(jù)中,橫向和縱向傾斜角度都在100′以下,式(3)中,可以認(rèn)為在平臺(tái)校準(zhǔn)過(guò)程中發(fā)生了微小的角度變化,則cosα=cosβ=1,sinα=α,sinβ=β。于是
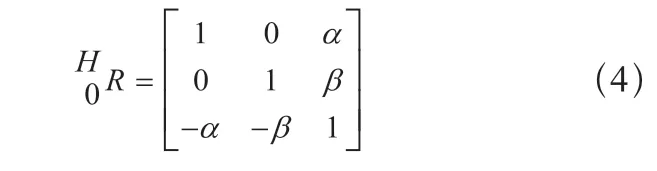
同時(shí),托架平臺(tái)在水平坐標(biāo)系OX0Y0上的坐標(biāo)(i0,j0,k0)變?yōu)?/p>
1.2 “循環(huán)多次”最高點(diǎn)不動(dòng)調(diào)平方法
平臺(tái)調(diào)平的核心問(wèn)題是如何使得四個(gè)支撐點(diǎn)處于同一高度。傳統(tǒng)最高點(diǎn)不動(dòng)調(diào)平法能精準(zhǔn)解算出各個(gè)支撐點(diǎn)距最高點(diǎn)的位置誤差,理論上運(yùn)用該算法,對(duì)機(jī)載托架平臺(tái)各個(gè)支撐點(diǎn)添加一次墊片就可以使其達(dá)到水平。但實(shí)際上,由于機(jī)載托架平臺(tái)橫向和縱向具有很強(qiáng)的耦合性,加之?dāng)?shù)據(jù)測(cè)試時(shí)存在誤差等因素,且機(jī)載成品托架每個(gè)支撐螺釘?shù)膲|片厚度S 為一定值,屬于離散量(S 分別為0.2mm、0.3mm、0.5mm、0.8mm、1mm、1.5mm、2mm、3mm),運(yùn)用傳統(tǒng)最高點(diǎn)不動(dòng)調(diào)平法對(duì)機(jī)載托架進(jìn)行調(diào)平時(shí)很難一次完成,需要反復(fù)調(diào)整才能達(dá)到最終的水平狀態(tài)。因此,本文運(yùn)用“循環(huán)多次”最高點(diǎn)不動(dòng)調(diào)平方法[4],具體實(shí)現(xiàn)過(guò)程如圖2 所示。
為了保證測(cè)試的精準(zhǔn)性,在對(duì)機(jī)載慣導(dǎo)托架進(jìn)行校準(zhǔn)時(shí),不選用受環(huán)境變化影響較大的傳感器來(lái)測(cè)試傾角值,而是選用傳統(tǒng)校準(zhǔn)方法所用的可靠性良好的測(cè)微準(zhǔn)直望遠(yuǎn)鏡(CZW)、光學(xué)象限儀和校準(zhǔn)靶板來(lái)測(cè)試托架平臺(tái)的傾斜數(shù)據(jù)。為了獲得平臺(tái)的傾斜角度,在調(diào)平運(yùn)算之前先對(duì)測(cè)試的數(shù)據(jù)進(jìn)行預(yù)處理,如果橫向或縱向傾斜角度的絕對(duì)值大于100′,則終止對(duì)慣導(dǎo)托架的調(diào)平,重新拆裝。當(dāng)橫向和縱向傾斜角度絕對(duì)值都小于100′時(shí),才對(duì)慣導(dǎo)托架進(jìn)行調(diào)平校準(zhǔn)。首先,判斷橫向和縱向的傾斜角度是否在慣導(dǎo)平臺(tái)傾斜角誤差δ=3′范圍內(nèi),由圖1 可知,只有|α|<δ且|β|<δ時(shí)慣導(dǎo)托架平臺(tái)才能達(dá)到水平狀態(tài),否則應(yīng)利用傾斜角度信息確定平臺(tái)的最高點(diǎn),且該點(diǎn)在調(diào)平過(guò)程中應(yīng)保持不動(dòng),再利用最高點(diǎn)不動(dòng)調(diào)平法解算出其他三個(gè)支撐點(diǎn)需要抬升的精確高度,添加相應(yīng)厚度的墊片,然后,重新測(cè)試數(shù)據(jù)并判斷平臺(tái)的傾斜角度,如果不水平則再次進(jìn)行調(diào)平,如此形成循環(huán)多次的調(diào)平方式,直到托架平臺(tái)在橫向和縱向的傾斜角度都達(dá)到在傾斜角誤差δ=3′范圍內(nèi)為止。
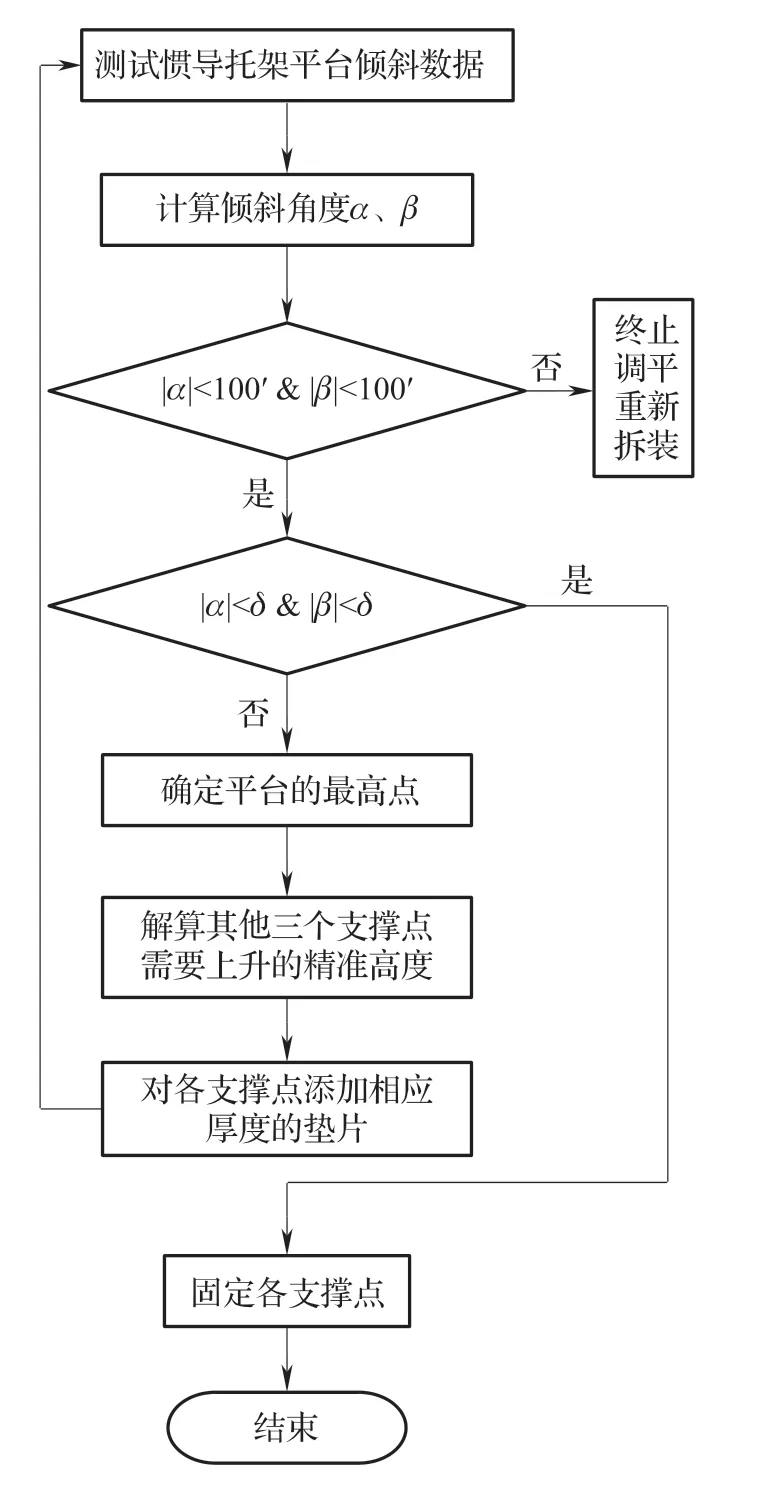
圖2 “循環(huán)多次”最高點(diǎn)不動(dòng)調(diào)平方法流程圖
1.3 運(yùn)用VC 與Matlab 的COM 接口混合編程技術(shù)實(shí)現(xiàn)系統(tǒng)開(kāi)發(fā)
需要在Windows 平臺(tái)上完成機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)的設(shè)計(jì),且該系統(tǒng)應(yīng)具備實(shí)時(shí)處理大量矩陣的能力。
采用一般的高級(jí)語(yǔ)言(如VC++)開(kāi)發(fā)測(cè)量數(shù)據(jù)處理系統(tǒng),將花費(fèi)大量時(shí)間處理矩陣運(yùn)算,增加了軟件開(kāi)發(fā)的勞動(dòng)量,大大延長(zhǎng)了開(kāi)發(fā)周期,可能影響程序的執(zhí)行效率與運(yùn)行速度。
Matlab 有較強(qiáng)的處理矩陣運(yùn)算的能力,但其只是一種解釋性語(yǔ)言,執(zhí)行效率低,且局限于Matlab 運(yùn)行環(huán)境,也不利于軟件開(kāi)發(fā)。
機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)不僅需要處理復(fù)雜的機(jī)載托架校準(zhǔn)算法,還需要建立應(yīng)用程序界面,因此很難采用VC++或Matlab 任何一個(gè)軟件獨(dú)立實(shí)現(xiàn)。因此,決定采用基于COM 接口的VC 與Matlab 混合編程技術(shù)來(lái)設(shè)計(jì)和開(kāi)發(fā)機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)。COM 是一種通用的對(duì)象接口,是以組件為發(fā)布單元的對(duì)象模型,遵循這種接口標(biāo)準(zhǔn)要求的任何語(yǔ)言都可以實(shí)現(xiàn)對(duì)它的跨應(yīng)用平臺(tái)調(diào)用。VC++6.0 環(huán)境下的MFC 技術(shù)是對(duì)龐大的標(biāo)準(zhǔn)Win32 API 函數(shù)的封裝[5],提供了圖形環(huán)境下應(yīng)用程序的框架及創(chuàng)建應(yīng)用程序的組件。通過(guò)采用VC++來(lái)開(kāi)發(fā)應(yīng)用程序的界面、采用Matlab 來(lái)實(shí)現(xiàn)應(yīng)用程序的功能,就可以充分發(fā)揮他們各自的優(yōu)勢(shì),縮短軟件開(kāi)發(fā)周期,降低軟件開(kāi)發(fā)難度和復(fù)雜度,提高軟件開(kāi)發(fā)效率。
運(yùn)用VC 與Matlab 的COM 接口混合編程技術(shù)[6]開(kāi)發(fā)軟件的實(shí)現(xiàn)過(guò)程如下。
1)按照設(shè)計(jì)思想及設(shè)計(jì)原則,在Matlab 編輯器里編輯處理平臺(tái)調(diào)平算法的程序,m文件必為函數(shù)文件,而非腳本文件。
2)利用Matlab 的comtool 工具創(chuàng)建COM 文件。
3)將封裝COM 形成的相關(guān)文件拷貝至平臺(tái)自動(dòng)校準(zhǔn)系統(tǒng)工程目錄下,并添加至工程中。
4)編制COM 接口程序,使Matlab與VC++之間可無(wú)縫傳遞數(shù)據(jù)。
5)在VC++6.0 環(huán) 境 下 用MFC 技術(shù)設(shè)計(jì)人機(jī)交互界面,并調(diào)用相關(guān)函數(shù),完成其他相關(guān)功能。
混合編程具體過(guò)程見(jiàn)圖3。
1.4 機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)軟件設(shè)計(jì)
機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)軟件要求能夠方便地進(jìn)行系統(tǒng)程序的開(kāi)發(fā)、測(cè)試、運(yùn)行和維護(hù),并能很好地進(jìn)行系統(tǒng)管理,具有友好的人機(jī)模塊,操作簡(jiǎn)單、信息齊全。機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)的軟件部分設(shè)計(jì)如圖4 所示,系統(tǒng)可分為COM組件(Component 工程文件)和用戶界面(WND 工程文件)兩大部分。托架傾斜角度解算、慣導(dǎo)托架校準(zhǔn)數(shù)學(xué)模型解算、左速率陀螺成品托架校準(zhǔn)數(shù)學(xué)模型解算、右速率陀螺成品托架校準(zhǔn)數(shù)學(xué)模型解算、加速度計(jì)成品托架校準(zhǔn)數(shù)學(xué)模型解算等數(shù)據(jù)的處理都封裝在COM組件中,用戶界面主要負(fù)責(zé)機(jī)載托架傾斜信息的輸入和解算結(jié)果的實(shí)時(shí)顯示,用戶界面和COM 組件之間的數(shù)據(jù)交互主要是通過(guò)MFC中的文檔視圖來(lái)實(shí)現(xiàn)。
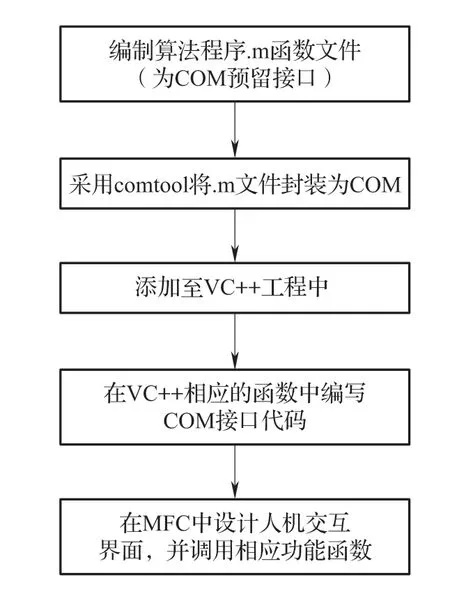
圖3 混合編程實(shí)現(xiàn)過(guò)程
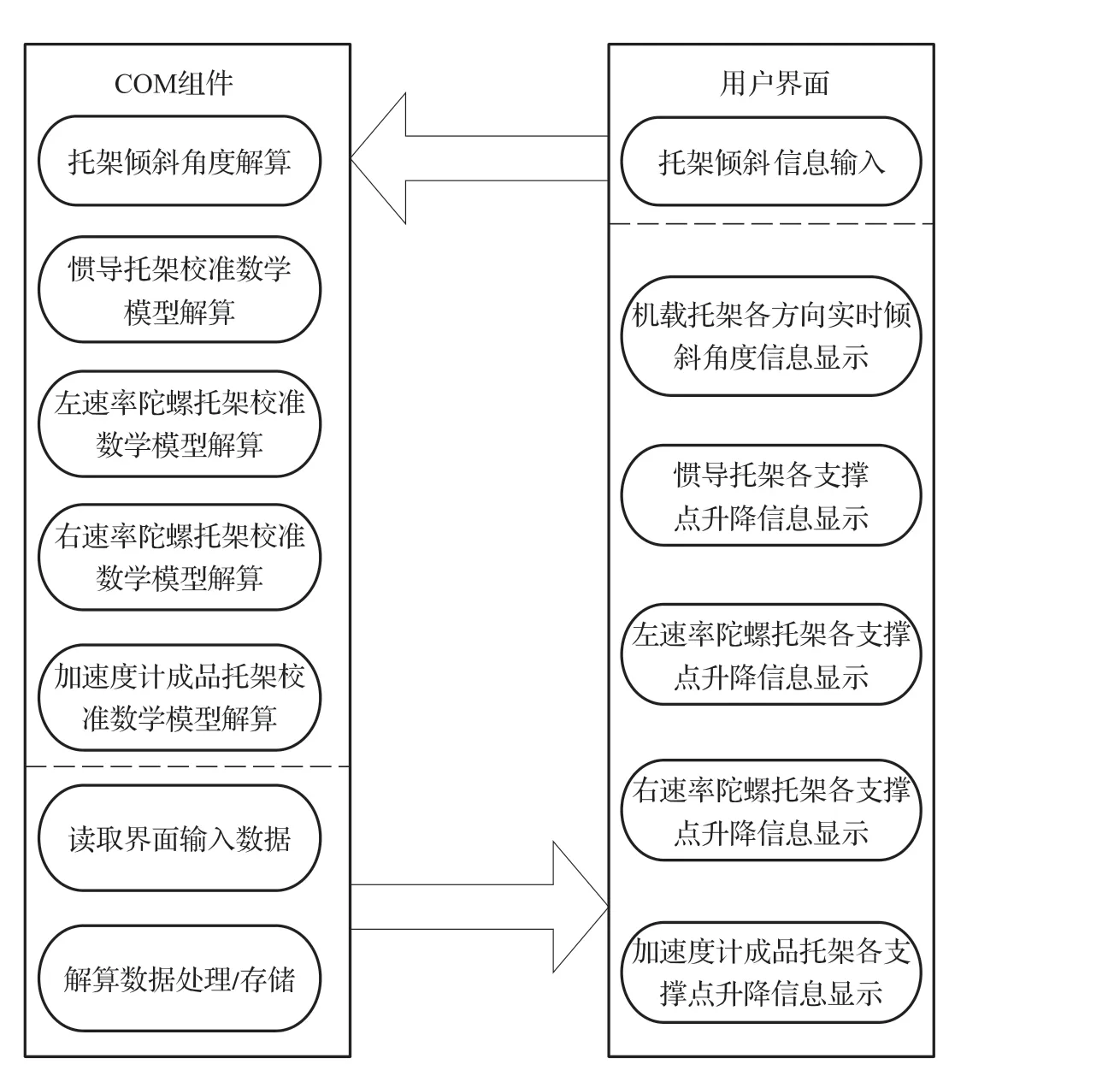
圖4 機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)測(cè)試儀的軟件結(jié)構(gòu)
機(jī)載托架自動(dòng)校準(zhǔn)系統(tǒng)的界面如圖5 所示。只需在系統(tǒng)主界面上輸入測(cè)微準(zhǔn)直望遠(yuǎn)鏡(CZW)和光學(xué)象限儀測(cè)試的橫滾、方位、俯仰方向的數(shù)據(jù),點(diǎn)擊需要校準(zhǔn)托架的“按鈕”,就能直接得到所校準(zhǔn)托架各個(gè)支撐螺釘需要添加墊片的精準(zhǔn)高度和托架平臺(tái)各方向的安裝誤差。首先,判斷各個(gè)方向的安裝誤差是否在校準(zhǔn)精度0.87mrad(即3’)范圍內(nèi),如果橫滾、方位、俯仰三個(gè)方向的數(shù)據(jù)分別在誤差范圍內(nèi),則記錄校準(zhǔn)精度,結(jié)束校準(zhǔn)過(guò)程;如果校準(zhǔn)精度不在誤差范圍內(nèi),則按界面顯示的各支撐點(diǎn)需要增高的數(shù)據(jù),取相近的墊片為各個(gè)支撐點(diǎn)添加墊片,然后再用CZW 和光學(xué)象限儀測(cè)試橫滾、方位、俯仰方向的數(shù)據(jù)并輸入到界面,再次點(diǎn)擊需要校準(zhǔn)托架的“按鈕”,判斷各個(gè)方向的安裝誤差是否在誤差范圍內(nèi),如此循環(huán)直到將機(jī)載托架平臺(tái)調(diào)平(各個(gè)方向在誤差范圍內(nèi))為止。
2 試驗(yàn)驗(yàn)證與結(jié)果分析
選擇兩架同型號(hào)、同批次的飛機(jī)作為試驗(yàn)對(duì)象,利用傳統(tǒng)的機(jī)載托架校準(zhǔn)方法對(duì)一架飛機(jī)的慣導(dǎo)托架進(jìn)行調(diào)平校準(zhǔn),采用新設(shè)計(jì)的自動(dòng)校準(zhǔn)系統(tǒng)對(duì)另一架飛機(jī)的慣導(dǎo)托架進(jìn)行校準(zhǔn),直到托架平臺(tái)各方向的安裝誤差都在校準(zhǔn)精度0.87mrad(即3’)范圍內(nèi)為止,記錄各個(gè)方向的安裝誤差和拆卸托架添加墊片的次數(shù),對(duì)兩個(gè)慣導(dǎo)托架平臺(tái)進(jìn)行上述50 組試驗(yàn),隨機(jī)抽取部分試驗(yàn)數(shù)據(jù),具體信息如表1 所示。
由表1 可知,傳統(tǒng)校準(zhǔn)方法的校準(zhǔn)精度較自動(dòng)校準(zhǔn)系統(tǒng)低,且添加墊片的次數(shù)比自動(dòng)校準(zhǔn)系統(tǒng)多。本文提出的自動(dòng)校準(zhǔn)系統(tǒng)不僅提高了機(jī)載托架平臺(tái)調(diào)平的精度,也大大提高了調(diào)平效率。
3 結(jié)論
運(yùn)用“循環(huán)多次”最高點(diǎn)不動(dòng)調(diào)平方法建立機(jī)載托架靜力學(xué)數(shù)學(xué)模型,并運(yùn)用VC 與Matlab 的COM 接口混合編程技術(shù)編制了高精度、穩(wěn)定性較好的系統(tǒng)程序,并設(shè)計(jì)了信息齊全、操作簡(jiǎn)單的人機(jī)交互界面。由試驗(yàn)結(jié)果可知,本文所設(shè)計(jì)的機(jī)載托架自動(dòng)校準(zhǔn)方法無(wú)論是在調(diào)平精度還是調(diào)平效率方面都有很大的提高,更適合于飛機(jī)裝配時(shí)對(duì)機(jī)載托架的校準(zhǔn)。
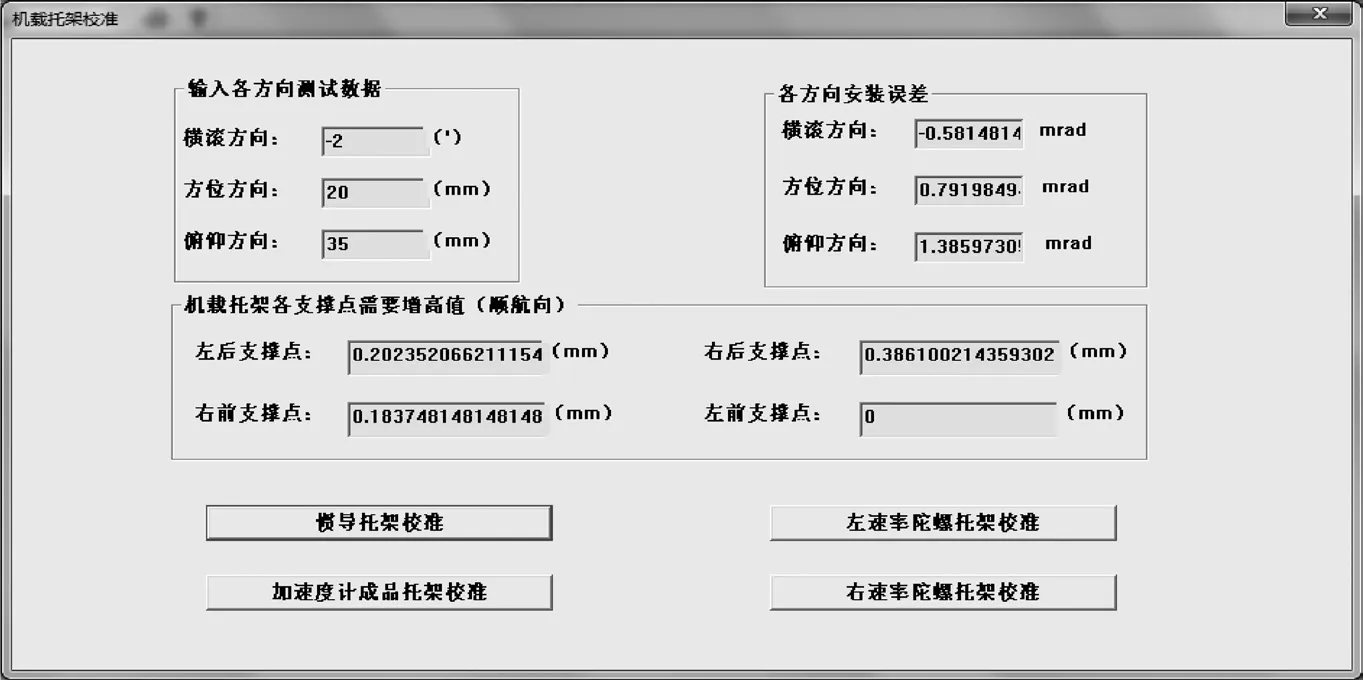
圖5 自動(dòng)校準(zhǔn)系統(tǒng)界面

表1 隨機(jī)抽取部分試驗(yàn)數(shù)據(jù)的對(duì)比信息
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
