高動態(tài)RDSS 短報文通信入站信號的頻率補償研究
2020-07-03 03:02:22伍蔡倫李勝軍
數(shù)字通信世界 2020年6期
關(guān)鍵詞:信號
王 剛,周 云,伍蔡倫,李勝軍
(1.中國電子科技集團(tuán)公司第五十四研究所,石家莊 050081;2.衛(wèi)星導(dǎo)航系統(tǒng)與裝備技術(shù)國家重點實驗室,石家莊 050081;3.陸裝駐石家莊地區(qū)第一軍代室,石家莊 050081)
0 引言
北斗導(dǎo)航系統(tǒng)經(jīng)歷了三個發(fā)展階段,即,北斗一代試驗導(dǎo)航系統(tǒng)、北斗二代區(qū)域?qū)Ш较到y(tǒng)、北斗三號全球?qū)Ш较到y(tǒng)。北斗一代試驗導(dǎo)航系統(tǒng)的工作體制為RDSS有源服務(wù)體制,提供定位、授時、短報文通信等功能。北斗二代區(qū)域?qū)Ш皆诒A鬜DSS 的基礎(chǔ)上,新增了RNSS 服務(wù),二代系統(tǒng)星座由三類衛(wèi)星組成,地球靜止軌道衛(wèi)星(GEO)、傾斜地球同步軌道衛(wèi)星(IGSO)和中圓軌道衛(wèi)星(MEO)[1],其中GEO 衛(wèi)星為1–5號衛(wèi)星,提供RDSS 與RNSS 服務(wù),其他兩類衛(wèi)星只提供RNSS服務(wù)。北斗三號為新一代全球?qū)Ш较到y(tǒng),在繼續(xù)保留了二代RDSS 的入站信號Lf0的基礎(chǔ)上,新增了三個頻點的上行入站信號Lf1,Lf2,Lf3,其中Lf0主要用于過渡二代導(dǎo)航設(shè)備,Lf1,Lf2為民用信號,Lf3為軍用信號,衛(wèi)星星座組成與二代導(dǎo)航系統(tǒng)一致。
RDSS 基本業(yè)務(wù)包括定位、位置報告、授時及短報文通信等,其中,短報文通信服務(wù)一般用于靜態(tài)應(yīng)用場景中,在高動態(tài)場景的應(yīng)用研究還較少。本文在北斗二代導(dǎo)航系統(tǒng)的基礎(chǔ)上研究了高動態(tài)下RDSS 短報文通信信號的入站問題,利用RNSS 的定位、測速功能,對RDSS 的入站信號頻率進(jìn)行了補償,并在工程化中實現(xiàn),目前已成功用于某型號火箭的位置報告服務(wù)中,對火箭殘骸回收提供有力的技術(shù)支撐。
1 高動態(tài)下RDSS 入站信號頻率分析
RDSS 短報文通信系統(tǒng)包括發(fā)送終端、GEO 衛(wèi)星、地面中心站、接收機終端四部分。發(fā)送終端將短報文信息通過L 波段信道發(fā)送給GEO 衛(wèi)星,通過星上的L/C透明轉(zhuǎn)發(fā)器轉(zhuǎn)為C 波段信號送至地面中心站,之后地面中心站對收到的信號、信息進(jìn)行核驗,如果滿足條件則再經(jīng)過C 波段上行信道發(fā)送至GEO 衛(wèi)星,GEO 衛(wèi)星再通過C/S 透明轉(zhuǎn)發(fā)器發(fā)送給目標(biāo)接收終端,即完成短報文信息的傳輸,原理框圖如圖1所示。

圖1 RDSS通信示意圖
發(fā)送終端中短報文與偽隨機碼先進(jìn)行擴頻調(diào)制,之后再與載波信號進(jìn)行BPSK 調(diào)制,因此,影響北斗RDSS 信號入站的因素主要有:信號發(fā)射功率、載波偽碼相位一致度、載體運動速度,其中,信號功率與載波偽碼相位一致度由設(shè)計保證。
在高動態(tài)下,主要考慮速度的影響,速度與多普勒的關(guān)系如下所示:

式中,c 為光速;fd為多普勒頻率;f 為載波頻率。二代RDSS 信號的L 波段上行頻率為1,615.68 MHz,地面中心站的入站動態(tài)范圍為±6 kHz,按上式計算出速度約為1,114.08 m/s,由此可以看出,當(dāng)目標(biāo)運動速度相對于衛(wèi)星的徑向速度高于1,114.08 m/s 時,會導(dǎo)致地面中心站接收不到下發(fā)的信息,因此,為了保證RDSS 短報文通信的成功,需要對載體多普勒頻率進(jìn)行補償。
2 高動態(tài)下RDSS 入站信號多普勒頻率補償
2.1 多普勒頻率的獲取
RDSS 入站頻率的補償來源為RNSS 對高動態(tài)載體的多普勒測量結(jié)果,根據(jù)RNSS 的收星狀態(tài)分為兩種情況:
(1)RNSS 接收通道中不存在GEO 衛(wèi)星,則通過載體位置、速度信息計算多普勒頻率,間接補償至上行入站信號。載體位置的確定采用四站定位的原理,先對至少4顆北斗衛(wèi)星利用偽碼相關(guān)進(jìn)行偽距測量,得到偽距值ρ,設(shè)載體的三維位置(xu,yu,zu)和鐘差tu,則偽距與用戶位置及用戶鐘差信息的關(guān)系[2]為

衛(wèi)星位置(xs,ys,zs)可以從導(dǎo)航電文星歷參數(shù)解析獲取,c 為光速,然后利用最小二乘算法即可以求出用戶的位置及鐘差。
在獲得用戶位置信息之后,RNSS 載體速度的測量主要利用多普勒觀測量的方法實現(xiàn),為表述方便,RNSS接收多普勒頻率為frd,RDSS 發(fā)射多普勒頻率為fsd。
接收多普勒frd可以通過讀取RNSS 接收通道中載波NCO 的鎖存值,將其轉(zhuǎn)換成頻率后與標(biāo)稱中頻值fc相比較獲得,公式為

式中,Ncycle為載波整周計數(shù);Nnco為載波相位計數(shù);M 為載波相位累加器位數(shù)。


換算成相對于GEO 衛(wèi)星的發(fā)射多普勒頻率

式中,fl為二代RDSS 上行頻率;c 為光速,即可求出需補償?shù)亩嗥绽疹l率。
(2)RNSS 接收通道中跟蹤到了具有RDSS 服務(wù)的GEO 衛(wèi)星,此時fsd與frd相同,則從通道中的載波跟蹤環(huán)提取對應(yīng)GEO 衛(wèi)星的載波相位信息,按公式(3)計算出的頻率即為需要補償?shù)亩嗥绽疹l率。
2.2 多普勒頻率的補償
RDSS 信號體制為BPSK 調(diào)制,生成上行RDSS 頻率的方式一般采用二次變頻[4]的方式實現(xiàn),如圖2所示:
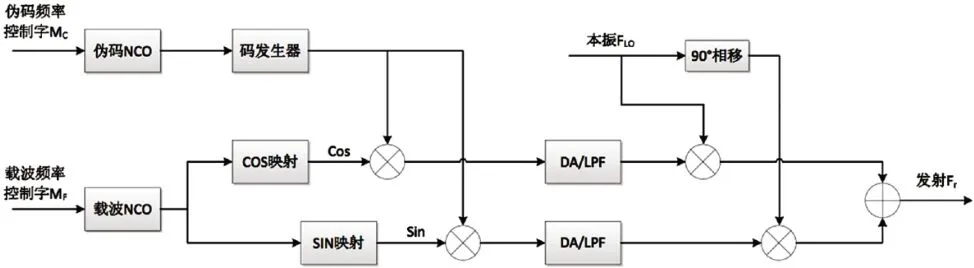
圖2 RDSS動態(tài)補償方案原理框圖
圖2 中,偽碼NCO 生成碼發(fā)生器的時鐘速率,控制碼發(fā)生器生成二進(jìn)制偽碼,之后再與載波NCO 生成的正交中頻信號進(jìn)行調(diào)制,接著將其進(jìn)行DA 變換為模擬信號并通過低通濾波器濾除掉鏡像信號,最后與本振信號二次調(diào)制實現(xiàn)最終RDSS 的入站信號。結(jié)合以上分析,對于高動態(tài)的載體,只需將發(fā)射多普勒頻率折成所需的頻率控制字即可實現(xiàn)多普勒頻率的補償。
載波頻率控制字[5]為

偽碼頻率控制字為

式(7)、式(8)中,fb,N,fs,fl,fcode均為已知量,分別為載波中頻調(diào)制頻率,NCO 相位累加器位數(shù),NCO工作頻率,RDSS 入站信號Lf0的頻率以及擴頻偽碼的頻率。
3 工程實現(xiàn)方案及測試結(jié)果
實際應(yīng)用為高動態(tài)箭載場景,RNSS 采用雙天線合路的方式保證收星情況,接收GPS L1信號及BD 二代系統(tǒng)B1頻點信號,RDSS 采用雙天線輪流發(fā)射的方式發(fā)射入站信號。
發(fā)射硬件平臺采用FPGA+DSP+AD9364 的架構(gòu),F(xiàn)PGA 主要實現(xiàn)一次變頻、通道跟蹤的功能,DSP 主要實現(xiàn)定位、速度及多普勒頻率的計算,AD9364主要實現(xiàn)二次變頻生成上行RDSS 入站信號。工程實現(xiàn)框圖如圖3所示。
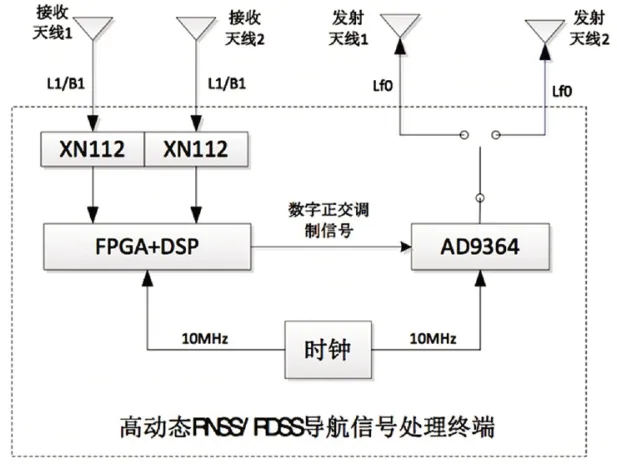
圖3 RDSS動態(tài)補償工程實現(xiàn)原理框圖
圖3 中有源天線接收導(dǎo)航信號L1,B1,之后經(jīng)過綜合射頻電路XN112輸出數(shù)字中頻信號至FPGA,接著FPGA 與DSP 聯(lián)合完成捕獲、跟蹤、電文解調(diào)、定位解算、速度解算、多普勒計算等,然后按照式(7)、式(8)計算出需要調(diào)整的偽距和載波NCO 頻率控制字,再通過FPGA 實現(xiàn)一次正交變頻、AD9364二次變頻以及開關(guān)切換策略等,最終將RDSS 入站信號發(fā)送出去。為了保證補償?shù)恼_性,在地面搭建了測試系統(tǒng)對補償方案進(jìn)行了驗證,測試系統(tǒng)的原理如圖4所示。
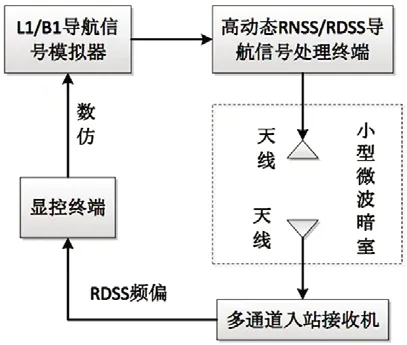
圖4 地面測試系統(tǒng)原理框圖
圖4 中,衛(wèi)星導(dǎo)航信號由顯控終端中的數(shù)仿軟件控制L1/B1導(dǎo)航信號模擬器輸出,之后經(jīng)過高動態(tài)RNSS/RDSS 導(dǎo)航信號處理終端進(jìn)行定位、測速、多普勒頻率補償、調(diào)制、變頻生成RDSS 入站信號,接著在小型微波暗室由發(fā)射天線變?yōu)闊o線信號,隨后RDSS 無線信號由同在小型微波暗室的入站接收機天線接收,經(jīng)入站接收機解析處理之后,獲得RDSS 入站信號的多普勒頻偏、功率電文等信息,送入顯示控制終端顯示,實物如圖5所示。

圖5 地面測試系統(tǒng)
試驗時設(shè)置模擬器場景為箭載動態(tài)場景,L1,B1頻點均開啟,在未加入補償策略之前,顯控終端無數(shù)據(jù)輸出,表明RDSS 入站信號未能成功接收,入站失敗。在加入補償策略之后,顯控終端存在數(shù)據(jù)輸出,記錄多通道入站接收機輸出的多普勒頻偏數(shù)據(jù),結(jié)果如圖6所示。

圖6 多普勒測試結(jié)果圖
圖6 中橫軸為采樣間隔30 s 每次,縱軸為多普勒偏移,由圖中可以看出,多普勒頻移的范圍為幾百赫茲,顯然明顯小于±6 kHz,由此可以證明補償策略的正確性。
之后經(jīng)過實際的飛行驗證,短報文信息能準(zhǔn)確地傳輸下來,根據(jù)理論設(shè)計,應(yīng)收到短報文信息26條,實際收到18條,接收成功率70%,因箭體在下落過程中,存在姿態(tài)失穩(wěn)階段,此時發(fā)射天線不能有效對準(zhǔn)GEO 衛(wèi)星,會導(dǎo)致RDSS 信號沒有被成功接收。經(jīng)過RDSS 短報文發(fā)送的載體速度測試結(jié)果如圖7所示。
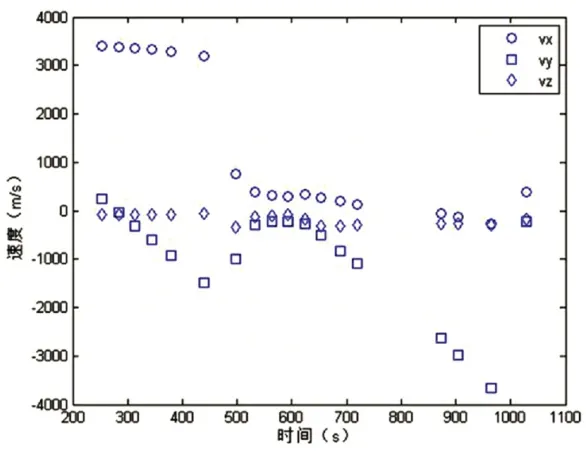
圖7 載體飛行速度
圖7 中采樣間隔30每次,Y 向載體速度最大處可達(dá)到3,660 m/s,超過了可允許的入站速度范圍,如果不進(jìn)行補償?shù)脑挘蜁斐蓴?shù)據(jù)的缺失,嚴(yán)重影響對航跡的分析及載體落點的控制等任務(wù)。
4 結(jié)束語
本文針對RDSS 短報文通信信號的入站問題,分析了高動態(tài)條件下的頻率補償問題,經(jīng)過地面測試及實際飛行結(jié)果表明,該多普勒頻率補償方案在高動態(tài)條件下可以成功實現(xiàn)RDSS 信號的入站接收。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
