基于圖像分割的云層測速方法
2020-06-30 08:49:28范燚杰祝雪妹
科學技術與工程 2020年16期
范燚杰,祝雪妹
(南京師范大學電氣與自動化工程學院,南京 210046)
塔式太陽能熱發電因其高效、持續、環保等特點被認為是具有很大商業發展前景的太陽能發電技術[1]。其工作原理是通過大量的定日鏡追蹤太陽并反射太陽光線匯聚到吸熱塔頂端的吸熱器,吸熱器吸收反射的太陽光線輻射能量,然后通過傳熱介質傳熱將水轉換成高溫蒸汽推動蒸汽輪機發電,其中能量的轉換為太陽能到熱能到機械能到電能[2]。在整個發電系統中,聚光系統接收太陽輻射能量的持續性和穩定性會影響整個電站的發電效率和運行安全。例如,當定日鏡場反射陽光時,若太陽受到運動云層的遮擋會導致吸熱器上的能流密度發生驟變,進而對吸熱器本身造成很大的熱應力,縮短吸熱管的使用壽命,嚴重時會對整個太陽能熱發電系統的運行造成很大危害[3-4]。因此,為保證系統的安全運行和吸熱管的使用壽命,需要對鏡場上空的云層運動進行分析和研究。
目前云層測速方法主要有三種,分別是文獻[5]中基于傳感器的云測速方法,通過在定日鏡場周圍放置兩層云影探測器,計算云層經過兩個相鄰傳感器的時間差,求得云層的運動速度。這種方法具有部署簡單、運行方便的優勢,但存在維護周期短和抗干擾能力差的缺點,且對運動方向較難判斷,文獻[6]中基于氣象測云雷達的云測速方法,通過氣象測云雷達發送電磁波來計算云層的移動速度、方位、高度等,此種方法雖技術成熟,但受到建設、使用成本等限制。文獻[7-9]中基于機器視覺的云測速方法(光流法、邊緣檢測和特征點匹配),都需要提取大量的云層邊緣特征點來計算目標云層的位移,但云層邊緣的特征點容易受到云層漂移的影響,導致計算誤差增加。
在上述方法的基礎上,本文提出一種基于圖像分割的云層速度測量方法,首先對云層圖像進行伽馬變換,然后采用遺傳算法分割云層和天空圖像,進而采用矩形框標記云層目標獲得整個目標的像素中心坐標,通過計算連續多幀的中心像素的歐式距離并求取算術平均值得到云層移動的平均速度。本文主要包含了云圖像處理方式、云圖像分割方法、目標檢測及處理方法和測速實驗及結果等四個主要內容。
1 云圖像處理方式
1.1 圖像增強
使用固定相機對天空圖像進行采集時受周圍環境影響,例如光照、溫度、空氣浮塵等因素,都會導致采集的圖像成像效果較差,如圖1所示,在拍攝的天空圖像中,受光照和空氣浮塵以及相機成像質量因素的影響,導致采集的圖像過曝,不利于對云層圖像的分割。
圖1 云團圖像Fig.1 Clouds image
圖像增強方法可以強化云層圖像的整體視覺效果,將原來不清晰的云層圖像變得清晰。伽馬變換是圖像增強中的一種,原有圖像的對比度較低,表現在灰度變換后的目標與背景在灰度值上相近,導致在后續的分割中目標或目標邊緣難以與背景分割開,通過伽馬變換對圖像中的像素做乘積,如式(1)所示:
s=crγ,r∈[0,1]
(1)
式(1)中:s為變換后的像素;c為原像素;γ以1為分界,當γ>1時對圖像灰度高的部分擴展作用比較強,當γ<1時對圖像灰度低的部分擴展作用就較強[10],根據實際情況可以選擇不同的γ對圖像的對比度進行改變。
1.2 圖像分割
在定日鏡場上空云層監測中,拍攝的天空和云層圖像經過伽馬變換后兩者在灰度值上區別明顯,如圖2所示。圖像分割就是將獲得的圖像分成兩個及以上具有不同性質的區域[11],一般是根據灰度進行二值化分割。
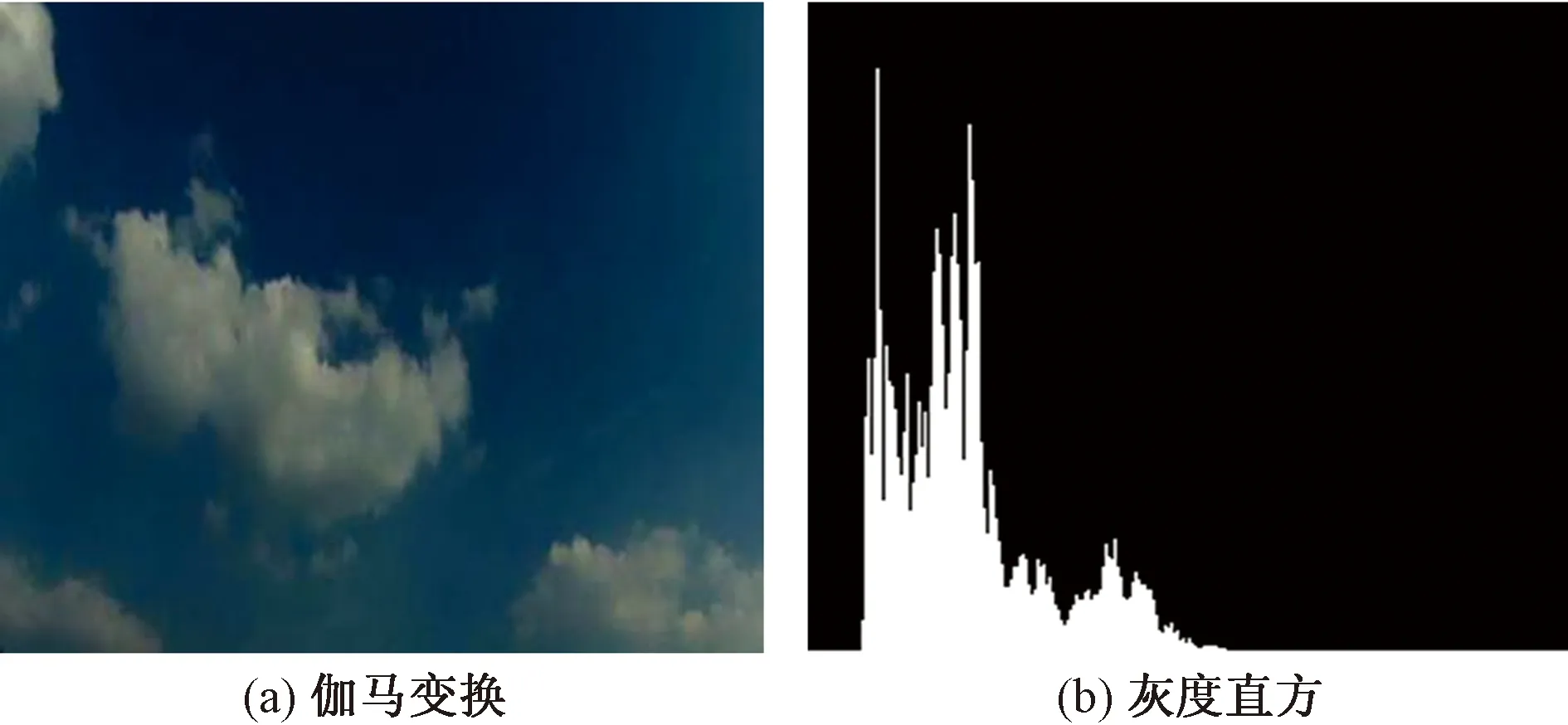
圖2 增強后的灰度直方圖Fig.2 Gray histogram through Gamma enhancement
從圖2中可以看到,圖像像素的灰度直方圖主要集中在兩個部分,但分界線不是特別明顯,因此需要選擇合適的閾值將目標云層和天空背景從像素灰度上分割開。閾值分割有以下兩個步驟:①確定分割需要的閾值;②將圖像中所有像素點的灰度值與選擇的參考值進行比較。
研究的圖像中,目標與背景比較簡單,因此適合采用單閾值分割方法,其數學表達式為

(2)
根據式(2)進行分割,得到二值化圖像I′(x,y),其中A為設定閾值;x、y代表像素的橫縱坐標[12]。
2 云圖像分割方法
拍攝的云團圖像采用圖像分割的方式將目標和背景圖像分割開,其中閾值的選取極為關鍵,影響到是否能將目標和背景準確的分割開。
2.1 分割方法選擇
在圖像處理中常用的二值化分割方法有固定閾值分割、自適應閾值分割、遺傳算法分割等。固定閾值分割是依靠先期經驗,需要人工去設定閾值,適合圖像質量較好的分割場景,而圖像成像質量受環境影響的場景不能很好地適應;自適應閾值分割方法是局部閾值分割方法,對像素點鄰域進行閾值選擇,適合小范圍分割;遺傳算法是全局閾值分割方法,通過優勝劣汰的迭代方式去選擇全局最佳閾值。遺傳算法對圖像進行處理時,并不專注于像素鄰域特性最好而是獲得好的處理結果,使圖像處理的效果接近人眼的觀察效果,而且能夠抑制噪聲和圖像光照變化等因素的影響。因此,選擇基于遺傳算法的圖像分割方法去分割云層圖像。
2.2 遺傳算法步驟
初始種群的建立:采用二進制0~1編碼方式隨機生成,根據灰度L的范圍0~255,確定染色體長度為8位。
交叉:根據設定的交叉概率和種群大小確定交叉數目,在種群中隨機選擇染色體進行交叉轉換。
變異:發生變異的基因數目(mutation_number)由變異概率(mutation_rate)和總基因數目(sum)決定,依據為
mutation_number=rand(mutation_rate×sum)
(3)
適應度值:判斷群體中的個體優劣程度,決定個體是否能進入下一代繼續繁衍,適應度值(fitness)的計算方法為
fitness(1,i)=lownum×highnum×(μ1-μ2)2
(4)
式(4)中:lownum表示低于閾值的灰度的像素的總個數;highnum表示高于閾值的灰度的像素的總個數;μ1和μ2分別代表上述兩類的均值。
選擇:采用輪盤賭的方式。
設定交叉概率為0.5,變異概率為0.01,最大迭代數是100,分割結果如圖3所示。
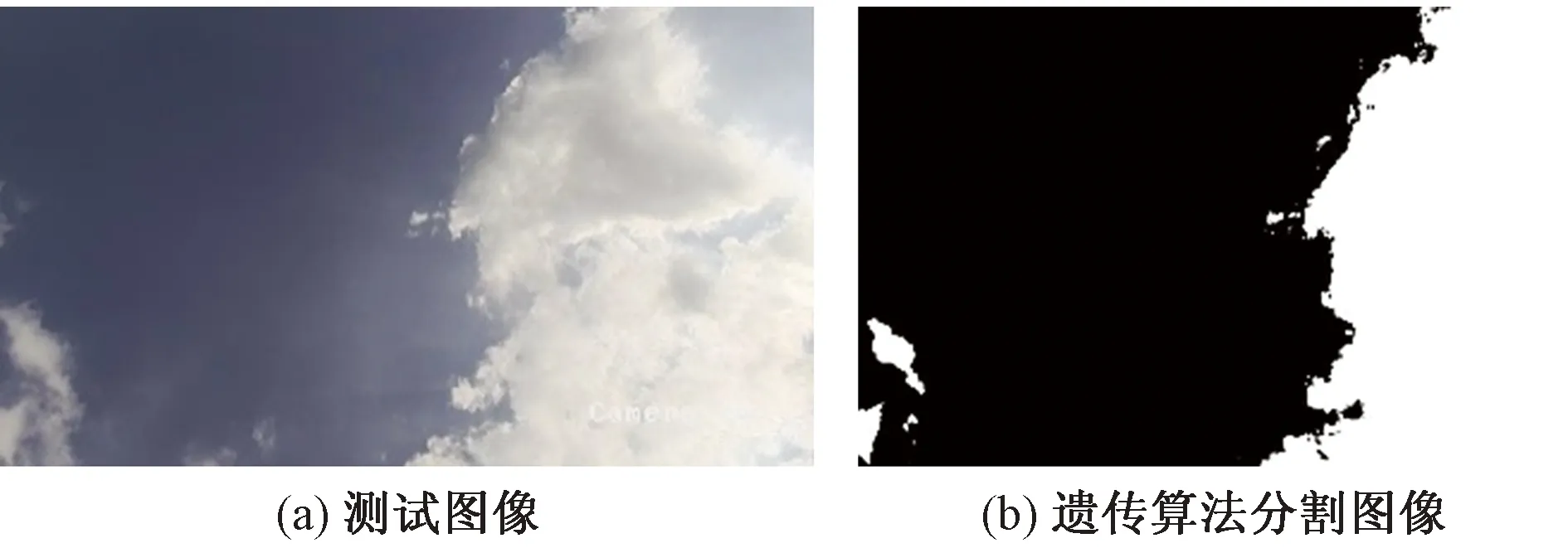
圖3 圖像分割結果Fig.3 Image segmentation result
從圖3中可以看到云團圖像被較好地分割出來,同時對同一幅圖像分別采用固定閾值、自適應閾值分割方法進行分割,分割結果如圖4所示。
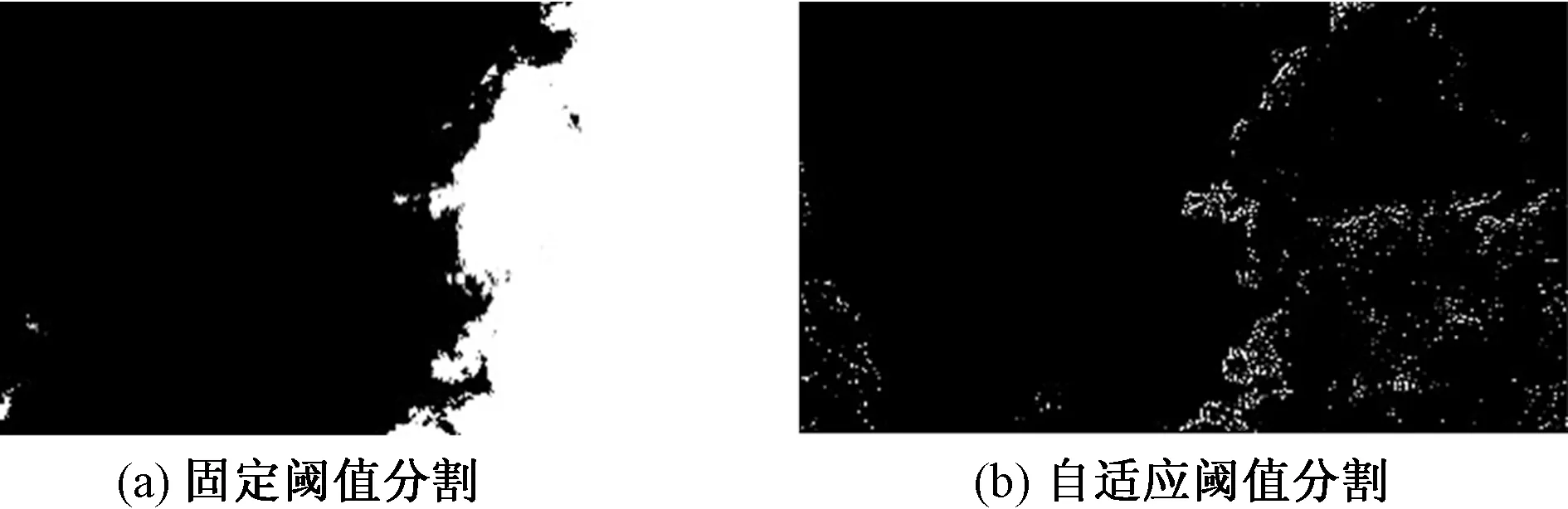
圖4 不同分割方法結果Fig.4 Results of different segmentation methods
其中固定閾值的大小選擇為170,相比遺傳算法分割效果,固定閾值在閾值與遺傳算法迭代出的最佳閾值相接近時效果接近,但不能根據環境變化自動改變閾值,且需要先期經驗作為指導;自適應閾值分割方法受限于自身分割算法原因無法分割出目標整體,不利于后續的目標整體標記。
3 目標檢測及處理方法
3.1 目標檢測方法
為了獲得圖像中云層的中心像素坐標,需要對分割后的云層目標進行矩形框標記。分割后的云層圖像被分割成幾個連通區域,其代表實際的云層目標。對連通區域進行標記以獲得坐標信息,標記步驟如下:
(1)對二值化圖像進行逐行掃描,將每一行的灰度值為白色(255)的像素點組成一個序列稱為域,存儲下起點、終點及行號。
(2)遍歷整個圖像,若在相鄰行中存在與所有域不重合的部分,則賦予它一個新的標號;若存在與前一行中的域有重合的部分,則將前一行重合域的標號賦給它;若與前一行中兩個以上的域有疊加,則給當前域一個相重合域中最小的標號,并將上一行的這幾個域的編號視為等價對,表明它們屬同一類[13]。
(3)將等價對轉換為等價序列,從1開始,給予每個等價序列一個編號。
(4)遍歷起始域的編號,搜尋等價序列然后賦予它們新的編號。
(5)將每個域的編號寫入到標記圖像中。
通過上述步驟,一幀云層圖像中被分割的所有云層目標被標記出來并被賦予不同的編號,如圖5所示,同時被標記連通域的矩形框起始坐標、長度和高度數據被存儲起來用以后續速度計算時調用。
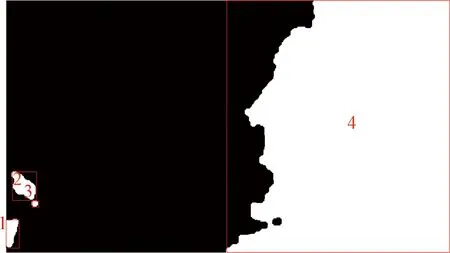
圖5 目標檢測結果Fig.5 Target detection results
3.2 運動目標匹配
在一幀圖像中會出現多個運動目標,為了保證計算的準確性,需要對相鄰兩幀圖像中的目標進行匹配。目標匹配是運動目標檢測中一個重要問題,比較常用的有快速最近鄰搜索包(FLANN)、模板匹配、暴力匹配(brute force)等匹配算法[14]。
上述匹配算法前提是需要提取一定的特征點,算法通過搜尋特征點周圍歐氏距離最小的像素點進行匹配,最小距離的計算式為
(5)
式(5)中:(x1,y1)、(x2,y2)分別是前后兩幀圖片中提取的目標特征點位置。但是圖像分割方法并沒有提取特征點,無法進行特征點匹配,因此上述匹配方法并不適合。考慮到目標檢測通過矩形框標記出目標的同時獲得了目標的長、寬和序列編號等數據信息,而在連續幀的圖像中,運動目標的面積變化較小,因此采用面積匹配的方式對不同幀的運動目標進行匹配。
匹配策略如式(6)所示:
|ST(i)-ST+1(j)|≤minArea,i,j=1,2,3,…
(6)
(1)計算每幀圖像中被標記的目標面積S(i),i,j代表被標記的目標編號。
(2)遍歷前后幀的圖像中的所有矩形框,比較兩者的差值大小,設定最小面積閾值Area。
(3)符合最小差值即為同一運動目標,提取坐標信息進行后續速度計算。
3.3 速度計算方法
目標的移動速度采用整體計算的方式,但并不是將目標的所有像素點都進行位移計算,而是利用得到的目標中心像素坐標作為特征點去替代光流法和邊緣檢測結合特征點方法中的大量特征點,這樣既降低了匹配復雜度又減少了計算量。考慮到在一定的時間內,云層的內部變化較為緩慢,采用多幀圖片計算算術平均值的方式來降低計算誤差。根據不同幀數中對應目標的中心像素坐標獲得目標圖像的移動位移和方向,如圖6所示。
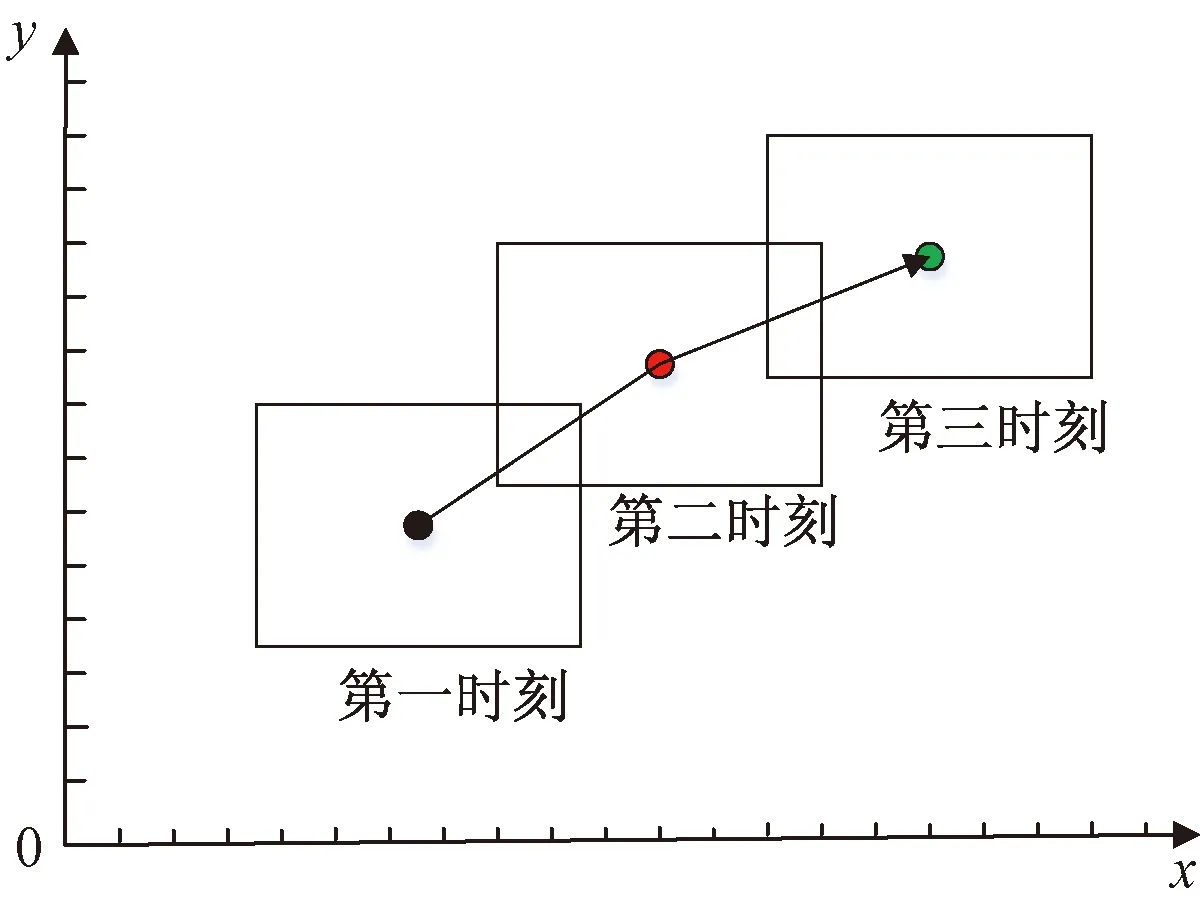
圖6 云層運動示意圖Fig.6 Schematic diagram of cloud movement
通過運動目標檢測和目標匹配方法,將得到的目標云層圖像的中心像素坐標(x,y)代入到運動云層位移和角度的計算公式中,如式(7)、式(8)所示:
(7)
(8)
式中:xi、yi為前一幀圖像中目標的橫縱坐標;xi+1、yi+1為后一幀圖像中目標的橫縱坐標;υ為目標的移動速度;θ為目標移動的角度;T為間隔的幀數。
4 測速實驗及結果
4.1 實驗
根據上述方法進行實驗測試,云團圖像采集時間為2019年8月13日15:30分,地點位于江蘇省南京市棲霞區,當天天氣狀況良好,空氣質量優,風向是西北風,風力1~2級,采用海康威視公司生產的DS-2CD系列魚眼攝像機對天空圖像進行采集,然后對拍攝后的視頻利用軟件每隔25幀提取一張照片,對提取后的圖片進行處理,得到如圖7所示的結果。
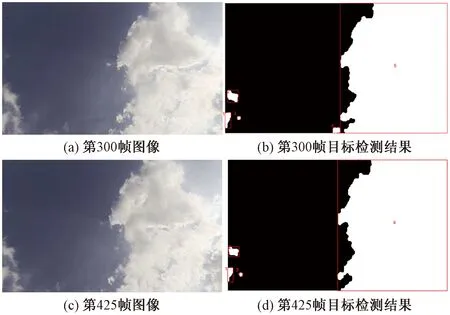
圖7 目標檢測的實驗結果Fig.7 Experimental results of target detection
標記的云層圖像坐標信息被存儲起來,為后續的速度計算提供數據,其中面積較小的會被剔除掉以減少干擾影響。
4.2 云團移動速度計算
拍攝的視頻幀率是12 幀·s-1,從提取圖像中選擇15張,每張相隔幀數是100 幀,其中前12 張圖像用來計算運動云層的均值速度,后3 張圖像用來和預測值進行對比,并計算預測誤差。
因為取景框的尺寸原因,導致云層圖像在高度上占滿了整個圖像,所以在連續多幀圖像中,目標像素的縱坐標并未發生改變,如表1所示。
根據上述速度計算公式和表1的坐標數據,得到目標移動速度的變化曲線,如圖8所示。
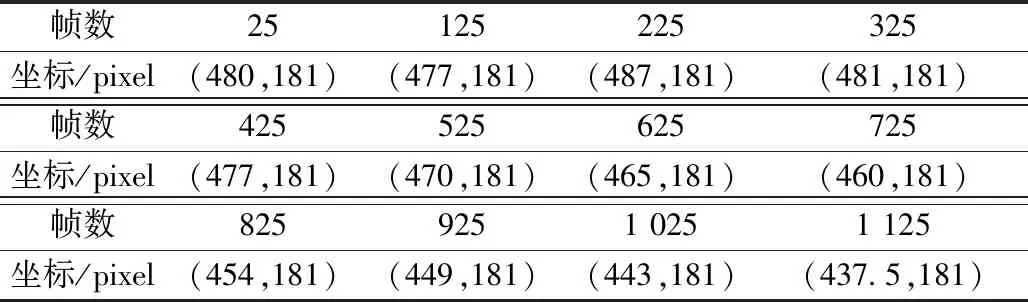
表1 云團圖像中心像素坐標Table 1 Cloud image center pixel coordinates
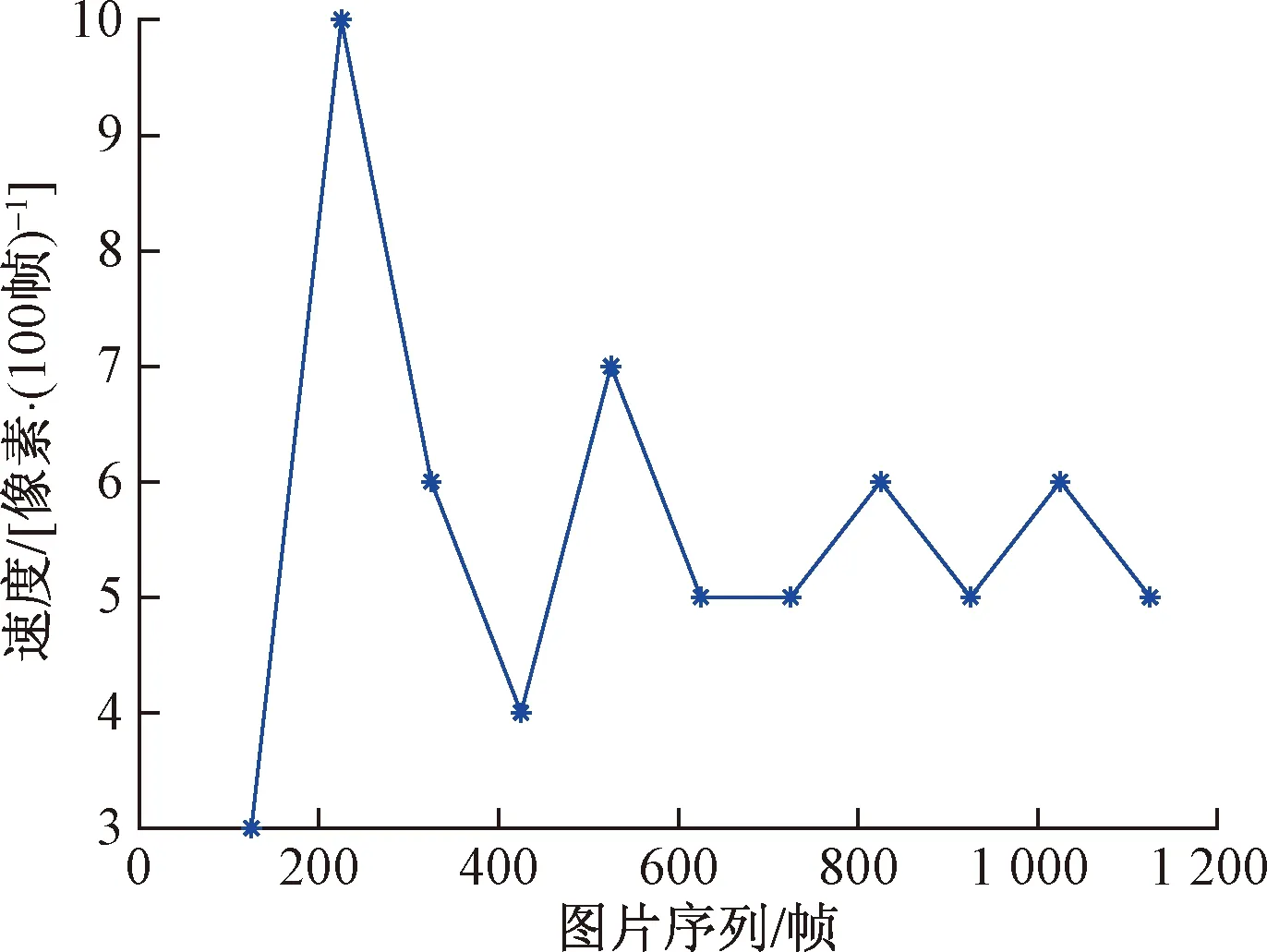
圖8 圖像分割法的云層速度變化曲線Fig.8 Cloud image moving speed curve based on image segment method
對前12張云層圖像的速度求取平均值,得到平均移動速度是5.63 像素·100幀-1,為驗證數據的可信度,對后面的幀圖像坐標進行預測,并與實際坐標位置進行比較,結果如表2所示。

表2 本文方法計算結果的比較Table 2 Comparison of proposed method calculation results
實驗結果表明,在大約2 min的時間內,所選目標的理論坐標計算值與坐標實際值相接近,誤差在1%以內。
為驗證本方法的準確性,選擇在同一運動場景下,根據特征點檢測的計算方法進行實驗,采用SURF(speeded up robust features)特征提取算法對云層圖像進行特征點提取,結果如圖9所示。

圖9 SURF特征點提取Fig.9 Feature points extracted by SURF
從圖9中可以看到,在云層圖像的邊緣提取了大量的特征點,接下來采用暴力匹配(brute force)算法對提取的特征點進行匹配,得到匹配結果如圖10所示。
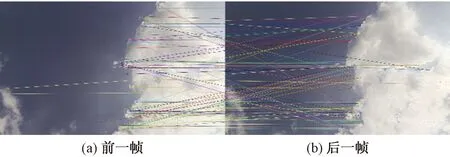
圖10 SURF結合暴力匹配的結果Fig.10 Result of SURF combine with brute force matching
同樣對選取的15張圖像進行特征點匹配,然后根據匹配的得到的特征點坐標數據進行速度計算,得到云層圖像的移動速度變化和角度變化,如圖11、圖12所示。
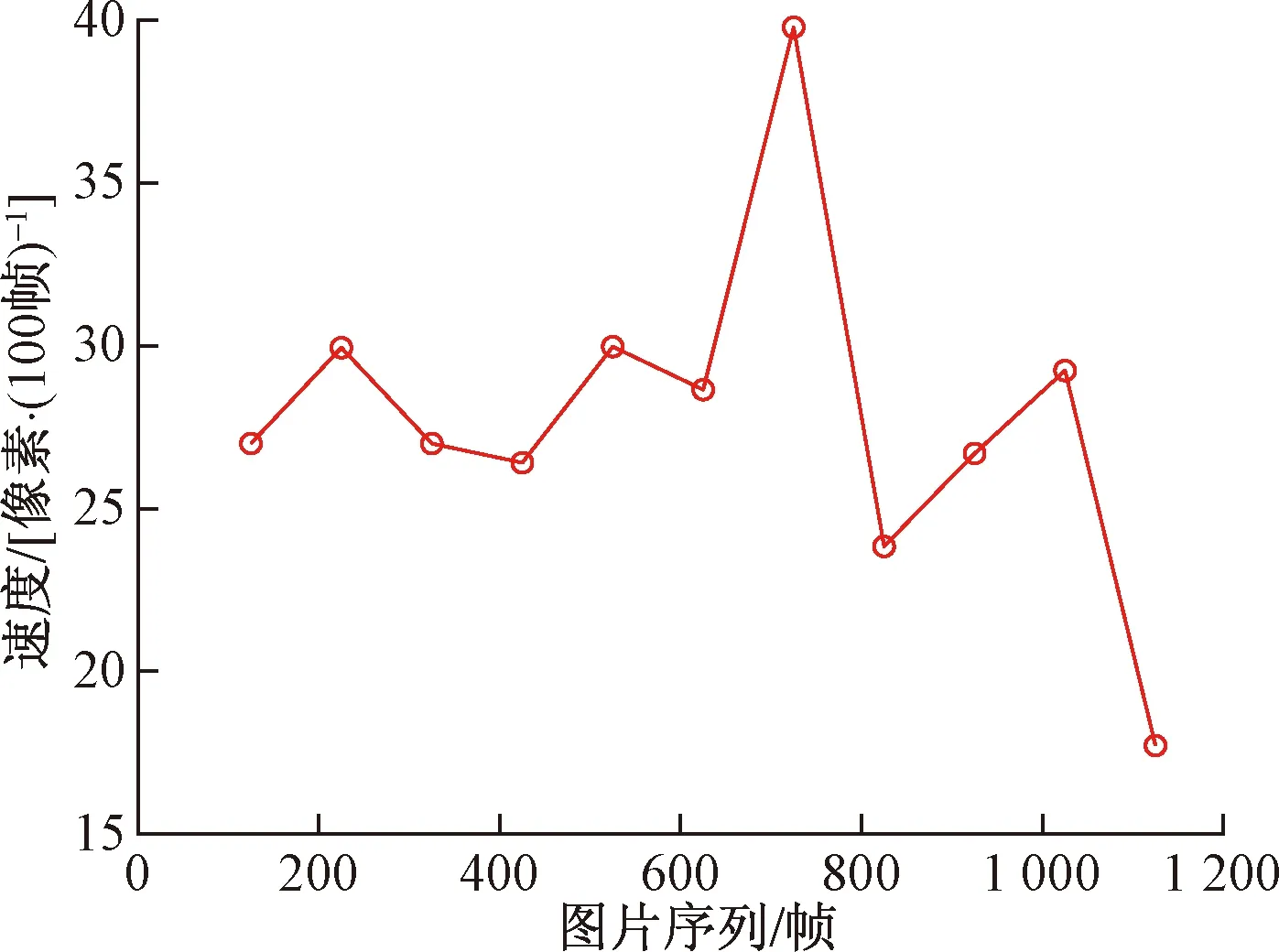
圖11 光流法的云層速度變化曲線Fig.11 Cloud image moving speed curve based on optical flow method
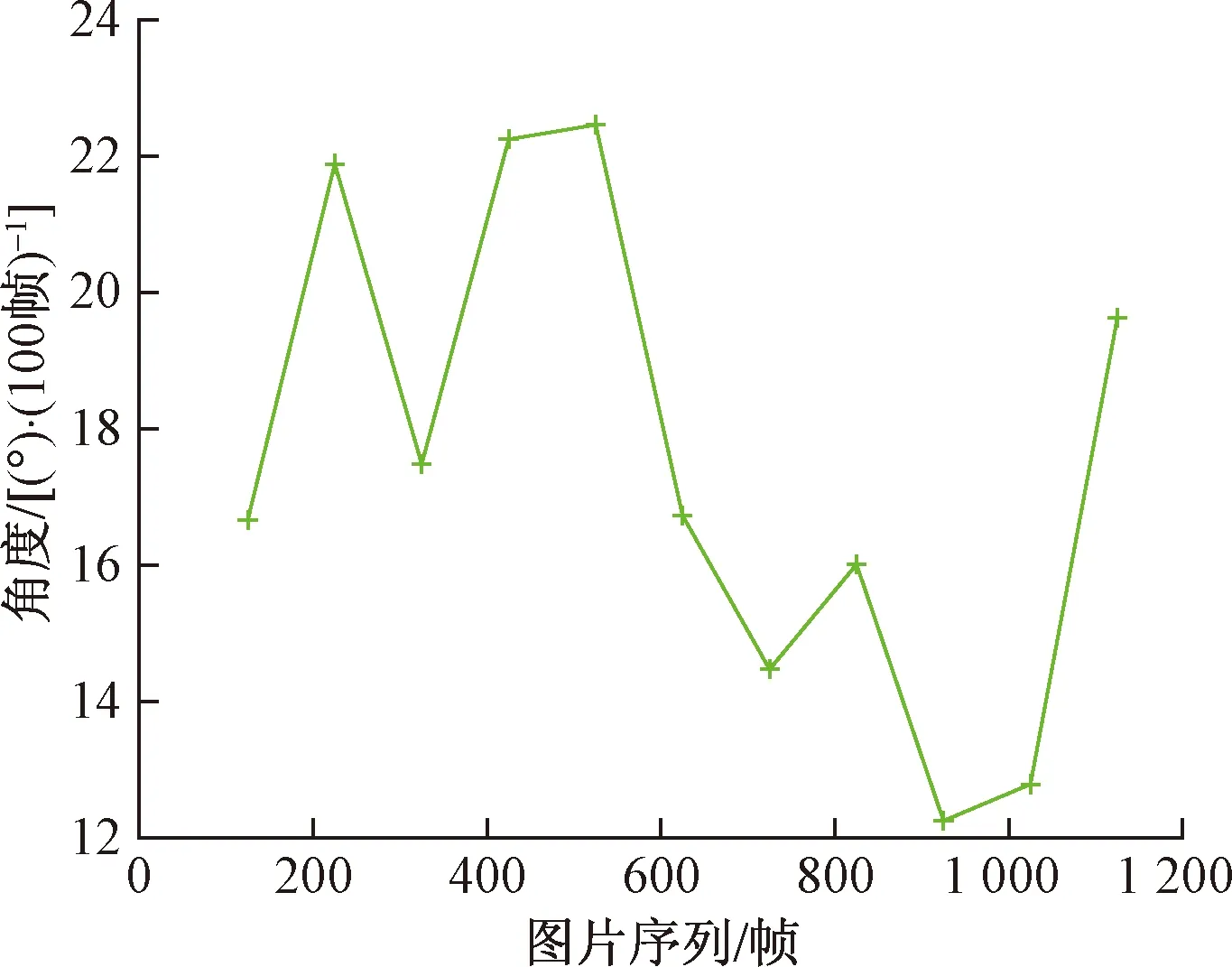
圖12 光流法的云層角度變化曲線Fig 12 Cloud image movement angle curve based on optical flow method
從圖11可以看到,云層圖像的速度在后期變化的較快,是由于提取的邊緣特征點在移動的過程中相比于云層整體的運動要劇烈的多,所以在變化曲線的后期浮動較為劇烈。
根據圖12得到云層圖像的移動速度均值為27.83 像素/100幀,角度均值為14.68(°)/100幀。為了驗證計算數據的可信度,對接下來的目標圖像特征點對應位置進行預測,選擇第1 225 幀圖像中的三個特征點作為參考值,如表3所示。
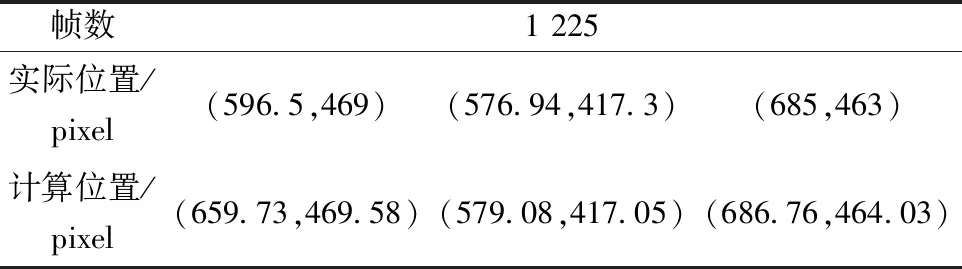
表3 光流法計算結果的比較Table 3 Comparison of optical flow method calculation results
計算結果表明,選取的三個點的坐標預測值的平均誤差在5%以內。
從上述的兩種測速方法的預測結果對比可得,本文方法在對隨后幀的云層圖像位置預測中,相比于光流法的預測誤差結果更小,表明了本文方法的可信度較高。
5 結論
針對塔式太陽能熱發電鏡場的云測速問題,通過對視覺圖像處理相關算法的研究得到以下結論。
(1)相比光流法的特征點檢測方式不存在特征點漂離的問題且計算量小,在后續的位置預測實驗中本文方法均值誤差在1%以內,光流特征方法預測均值誤差在5%以內,圖像分割方法預測精度較高。
(2)將遺傳算法應用到云圖像處理中,對云層圖像進行分割,然后對云層圖像進行目標檢測,通過計算中心像素坐標的改變,進而求得云層整體移動速度是一種可行的應用方案。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
兒童故事畫報(2019年5期)2019-05-26 14:26:14
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56