雙饋風(fēng)力發(fā)電機(jī)無速度傳感器控制方法研究
2020-06-29 07:21:29海櫻寧丙辰
機(jī)電信息 2020年12期
海櫻 寧丙辰

摘要:建立了可用于控制算法研究的雙饋風(fēng)力發(fā)電機(jī)數(shù)學(xué)模型,在確定電網(wǎng)電壓定向矢量控制策略的基礎(chǔ)上,提出了采用基于轉(zhuǎn)子電流的模型參考自適應(yīng)方法進(jìn)行電機(jī)轉(zhuǎn)速觀測的無速度傳感器控制方法。在雙饋風(fēng)力發(fā)電系統(tǒng)模擬實(shí)驗(yàn)平臺上對控制方法進(jìn)行了實(shí)驗(yàn)驗(yàn)證,結(jié)果證明了無速度傳感器定向矢量控制策略的有效性。
關(guān)鍵詞:雙饋風(fēng)力發(fā)電機(jī);無速度傳感器;模型參考自適應(yīng)
0? ? 引言
風(fēng)能作為一種可再生清潔能源,在世界范圍內(nèi)得到了廣泛的應(yīng)用。雙饋風(fēng)力發(fā)電系統(tǒng)采用轉(zhuǎn)子雙饋發(fā)電機(jī),其功率變換是在轉(zhuǎn)子側(cè)實(shí)現(xiàn)的,轉(zhuǎn)子側(cè)電路流過的功率由轉(zhuǎn)差功率決定,一般僅為發(fā)電機(jī)定子額定功率的30%左右[1],大大降低了變換器的容量和成本。因此,該方案在兆瓦級以上風(fēng)電系統(tǒng)中應(yīng)用尤為廣泛,發(fā)展前景十分廣闊[2-3]。
在雙饋風(fēng)電控制系統(tǒng)中,需要實(shí)時(shí)采集電機(jī)轉(zhuǎn)子的轉(zhuǎn)速或位置信號,通常是通過安裝光電編碼器等速度傳感器或位置傳感器來實(shí)現(xiàn)的。然而傳感器的安裝一定程度上降低了系統(tǒng)的可靠性[4],增加了系統(tǒng)的運(yùn)行和維護(hù)成本。近40年來,國內(nèi)外學(xué)者對無速度傳感器控制策略展開了研究,一般采用直接計(jì)算、狀態(tài)估計(jì)、參數(shù)辨識、間接測量等方法對轉(zhuǎn)子的速度進(jìn)行計(jì)算[5-6]。
本文對雙饋風(fēng)力發(fā)電機(jī)的控制算法展開了研究,在確定了電網(wǎng)電壓定向矢量控制策略的基礎(chǔ)上,采用以轉(zhuǎn)子電流為觀測量的模型參考自適應(yīng)方法進(jìn)行電機(jī)轉(zhuǎn)速辨識,實(shí)現(xiàn)了系統(tǒng)的無速度傳感器定向矢量控制。最后在實(shí)驗(yàn)室搭建的雙饋風(fēng)電模擬實(shí)驗(yàn)平臺上進(jìn)行了算法驗(yàn)證,證明了控制策略的有效性。
1? ? 雙饋發(fā)電機(jī)的數(shù)學(xué)模型
為了研究雙饋風(fēng)力發(fā)電機(jī)的控制方法,首先要建立可用于控制算法研究的數(shù)學(xué)模型。基于雙饋電機(jī)在三相靜止坐標(biāo)系下具有非線性、高階、強(qiáng)耦合的特點(diǎn)[7],為便于分析研究,通常采用坐標(biāo)變換的方法[8],將其在三相靜止坐標(biāo)系下的數(shù)學(xué)模型變換到(d,q)同步旋轉(zhuǎn)坐標(biāo)系下。同步旋轉(zhuǎn)坐標(biāo)系下的電壓方程式為:
2? ? 電網(wǎng)電壓定向矢量控制策略
本文采用電網(wǎng)電壓定向矢量控制,即將同步旋轉(zhuǎn)坐標(biāo)系的d軸定向于電網(wǎng)電壓空間矢量方向,由于電網(wǎng)電壓可以直接測量,因此該定向方式不易受電機(jī)參數(shù)的影響,可以實(shí)現(xiàn)準(zhǔn)確定向,保證控制算法的有效性[9]。此時(shí),電網(wǎng)電壓的d、q軸分量為:
雙饋發(fā)電機(jī)采用轉(zhuǎn)子電流環(huán)、定子側(cè)功率環(huán)的雙閉環(huán)控制策略,控制器可根據(jù)風(fēng)機(jī)實(shí)際轉(zhuǎn)速和電網(wǎng)容量需求,實(shí)時(shí)動態(tài)調(diào)節(jié)發(fā)電機(jī)輸出的有功功率和無功功率。
3? ? 無速度傳感器控制策略
在雙饋風(fēng)電系統(tǒng)中,為了保證運(yùn)行效率,發(fā)電機(jī)通常運(yùn)行在同步轉(zhuǎn)速附近,這會導(dǎo)致轉(zhuǎn)子側(cè)的頻率和電壓值都比較小,直接將電機(jī)轉(zhuǎn)子反電動勢或磁鏈作為觀測量將變得非常困難[10]。考慮到電機(jī)轉(zhuǎn)子電流可以直接進(jìn)行測量的優(yōu)勢,本文將轉(zhuǎn)子電流作為直接觀測對象,采用基于轉(zhuǎn)子電流的模型參考自適應(yīng)方法,將轉(zhuǎn)子電流作為模型的輸出量,通過比較參考模型和可調(diào)模型的誤差,并輸入到自適應(yīng)比較器中,不斷縮小參考模型輸出電流和可調(diào)模型輸出電流之間的偏差,當(dāng)偏差為0時(shí),即得到轉(zhuǎn)子轉(zhuǎn)速。
在不考慮電機(jī)定子、轉(zhuǎn)子電阻影響的情況下,由雙饋電機(jī)的電壓、磁鏈方程式,可計(jì)算出轉(zhuǎn)子電流為:
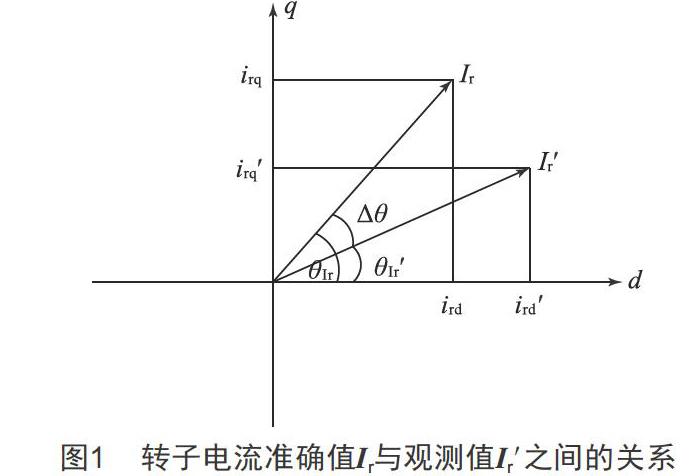
在兩相同步旋轉(zhuǎn)坐標(biāo)系下,定子電壓和電流的大小與轉(zhuǎn)子位置無關(guān),因此式(8)所表示的轉(zhuǎn)子電流也與轉(zhuǎn)子位置角無關(guān),可認(rèn)為是準(zhǔn)確值,將其作為參考模型。
圖1所示為轉(zhuǎn)子電流準(zhǔn)確值Ir與觀測值Ir′之間的矢量關(guān)系,其中,Δθ為轉(zhuǎn)子電流準(zhǔn)確值與觀測值之間的角度差。
當(dāng)轉(zhuǎn)子電流準(zhǔn)確值與觀測值之間的角度差為0時(shí),廣義誤差e即為0,此時(shí)轉(zhuǎn)速值ωr穩(wěn)定不變。對式(12)中的轉(zhuǎn)速信號進(jìn)行積分可得到轉(zhuǎn)子實(shí)際位置角,該位置角是電機(jī)轉(zhuǎn)子側(cè)電壓和電流進(jìn)行坐標(biāo)變換的必要值。將雙饋風(fēng)力發(fā)電機(jī)的速度辨識方法與上節(jié)提出的電網(wǎng)電壓定向矢量控制策略結(jié)合,則得到雙饋風(fēng)力發(fā)電機(jī)無速度傳感器控制系統(tǒng)。
4? ? 實(shí)驗(yàn)研究
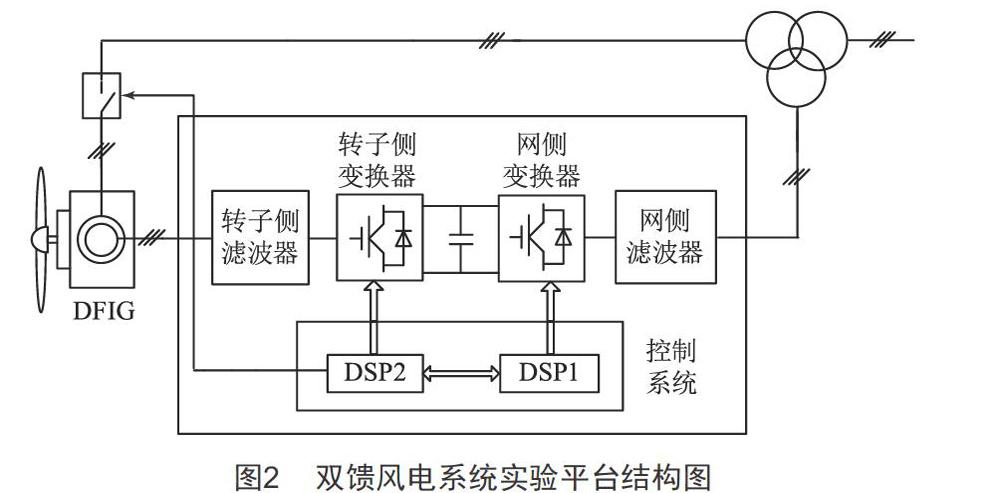
在實(shí)驗(yàn)室搭建的15 kW雙饋風(fēng)力發(fā)電系統(tǒng)模擬平臺上對控制策略進(jìn)行驗(yàn)證。實(shí)驗(yàn)平臺基本結(jié)構(gòu)如圖2所示,主要由雙饋發(fā)電機(jī)、風(fēng)機(jī)模擬系統(tǒng)、電機(jī)側(cè)變換器、網(wǎng)側(cè)變換器及其控制系統(tǒng)組成。
控制系統(tǒng)是風(fēng)電模擬平臺的核心,它由兩個(gè)TMS320F2812型號DSP控制器及其采集調(diào)理電路組成。DSP1負(fù)責(zé)對網(wǎng)側(cè)變換器進(jìn)行控制,實(shí)現(xiàn)網(wǎng)側(cè)變換器功率因數(shù)的可調(diào);DSP2對電機(jī)側(cè)變換器進(jìn)行實(shí)時(shí)控制,通過改變轉(zhuǎn)子電流調(diào)節(jié)雙饋發(fā)電機(jī)的輸出功率。
在實(shí)驗(yàn)室模擬平臺上,先后進(jìn)行了系統(tǒng)靜態(tài)實(shí)驗(yàn)和動態(tài)實(shí)驗(yàn)研究。圖3為發(fā)電機(jī)轉(zhuǎn)速約為800 r/min時(shí)的靜態(tài)實(shí)驗(yàn)波形,此時(shí)風(fēng)電系統(tǒng)為亞同步速狀態(tài)。從圖3中可以看出,在亞同步速運(yùn)行狀態(tài)下,網(wǎng)側(cè)變換器電壓和電流同相,變換器工作在整流狀態(tài);定子側(cè)電壓、電流保持反相,向電網(wǎng)輸出3 kW的恒定功率。對比圖3(d)和圖3(e)可以看出,通過模型參考自適應(yīng)辨識的電機(jī)轉(zhuǎn)速與碼盤讀出的實(shí)際轉(zhuǎn)速基本一致,其辨識精度較高。當(dāng)采用無速度傳感器控制方案時(shí),系統(tǒng)具有優(yōu)良的靜態(tài)性能。
圖4為動態(tài)實(shí)驗(yàn)過程波形,當(dāng)發(fā)電機(jī)轉(zhuǎn)速由800 r/min向1 100 r/min變化時(shí),系統(tǒng)從亞同步速過渡到超同步速。在電機(jī)轉(zhuǎn)速變化的整個(gè)過程中,定子側(cè)的電壓和電流始終反相,電機(jī)始終處于發(fā)電狀態(tài),輸出功率保持不變;當(dāng)電機(jī)轉(zhuǎn)速變化時(shí),轉(zhuǎn)子電流的頻率隨之發(fā)生變化,電機(jī)轉(zhuǎn)速越接近同步轉(zhuǎn)速,轉(zhuǎn)子電流的頻率越小,當(dāng)雙饋電機(jī)達(dá)到同步轉(zhuǎn)速1 000 r/min時(shí),轉(zhuǎn)子電流頻率為0,此時(shí),雙饋電機(jī)相當(dāng)于同步電機(jī);在電機(jī)轉(zhuǎn)速從亞同步速向超同步速變化的過程中,網(wǎng)側(cè)變換器功率因數(shù)由1變?yōu)?1,從整流狀態(tài)變化為逆變狀態(tài)。在該策略的控制下,系統(tǒng)具有良好的動態(tài)響應(yīng)。
5? ? 結(jié)語
本文對雙饋風(fēng)電系統(tǒng)無速度傳感器電網(wǎng)電壓定向矢量控制算法進(jìn)行了研究,并在實(shí)驗(yàn)室風(fēng)電模擬平臺上進(jìn)行了靜態(tài)和動態(tài)實(shí)驗(yàn)驗(yàn)證,結(jié)果表明該控制策略可以實(shí)現(xiàn)無機(jī)械速度或位置傳感器下,雙饋風(fēng)力發(fā)電機(jī)并網(wǎng)運(yùn)行的控制,并且具有較好的靜態(tài)和動態(tài)特性。
[參考文獻(xiàn)]
[1] 沙非,馬成廉,劉闖,等.變速恒頻風(fēng)力發(fā)電系統(tǒng)及其控制技術(shù)研究[J].電網(wǎng)與清潔能源,2009,25(1):44-47.
[2] 馬洪飛,徐殿國,苗立杰.幾種變速恒頻風(fēng)力發(fā)電系統(tǒng)控制方案的對比分析[J].電工技術(shù)雜志,2000(10):1-4.
[3] 肖亞平,肖灑,任貝婷,等.雙饋?zhàn)兯俸泐l風(fēng)力發(fā)電機(jī)并網(wǎng)運(yùn)行控制研究[J].電力學(xué)報(bào),2017,32(5):370-375.
[4] AMIRAT Y,BENBOUZID M E H,AL-AHMAR E.A Brief Status on Condition Monitoring and Fault Diagnosis in Wind Energy Conversion Systems[J].Renewable and Sustai-
nable Energy Reviews,2009,13(9):2629-2636.
[5] 李永東,李明才.感應(yīng)電機(jī)高性能無速度傳感器控制系統(tǒng)——回顧、現(xiàn)狀與展望[J].電氣傳動,2004,34(1):4-10.
[6] 陳偉昌,王孝洪,田聯(lián)房.基于DSP的無速度傳感器異步電機(jī)矢量控制[J].電機(jī)與控制應(yīng)用,2015,42(3):20-23.
[7] 王志新,羅文廣.電機(jī)控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,2010.
[8] 張興,張宗巍.PWM整流器及其控制[M].北京:機(jī)械工業(yè)出版社,2012.
[9] 海櫻,崔巖梅,寧丙辰.雙饋風(fēng)電系統(tǒng)控制策略及測試研究[J].計(jì)測技術(shù),2013,33(2):19-23.
[10] MOHAMMED O A,LIU Z,LIU S.A Novel Sensorless Control Strategy of Doubly Fed Induction Motor and Its Examination with the Physical Modeling of Machines[J].IEEE Transactions on Magnetics,2005,41(5):1852-1855.
收稿日期:2020-03-02
作者簡介:海櫻(1985—),女,河北人,工程師,研究方向:環(huán)試檢測、風(fēng)電變流器控制技術(shù)。
