基于PLC電子技術(shù)的智能車庫管理系統(tǒng)設(shè)計
2021-06-28 12:23:44鹿玉風(fēng)
電子測試 2021年2期
鹿玉風(fēng)
(江蘇省沛縣中等專業(yè)學(xué)校,江蘇徐州,221600)
0 引言
城市私家車數(shù)量的急劇增加,城市土地資源緊張,造成了停車位少、停車費高的問題。為了解決這一普遍城市問題,業(yè)界開始嘗試引入立體車庫,采用智能系統(tǒng)實現(xiàn)立體車庫的自動化存取控制,將平面停車空間轉(zhuǎn)變?yōu)榱Ⅲw停車空間,大大提高了土地資源利用率。但是由于我國立體智能車庫投入使用時間較短,智能化控制系統(tǒng)技術(shù)成熟度不夠,導(dǎo)致立體車庫的車輛存取效率過低,且適用車型較少,立體車庫日常運作維護(hù)成本較高,制約了立體智能車庫的普及發(fā)展。鑒于這一情況,本文基于S7—1200PLC自動化控制系統(tǒng)為主題,嘗試設(shè)計立體車庫智能控制系統(tǒng),期望能夠解決目前業(yè)界立體智能車庫操作效率低下、運作維護(hù)成本較高等問題。
1 智能車庫管理系統(tǒng)總體設(shè)計思路
立體車庫是一個集合了多種機(jī)械設(shè)備的車輛存取系統(tǒng)。按照立體車庫的業(yè)務(wù)運作特點,可以將立體車庫的車輛存放功能實現(xiàn)模塊細(xì)分為升降橫移模塊、多層循環(huán)模塊、想到堆垛模塊以及垂直循環(huán)模塊等多個類型。其中應(yīng)用技術(shù)相對更加成熟,適用范圍相對更廣,因此在居民建筑以及商務(wù)建筑的停車庫中的應(yīng)用最為廣泛。因此,本文將升降橫移類立體車庫作為研究對象。
按照升降橫移式立體車庫的車輛存取特點,要實現(xiàn)車輛的升降和平移,并維持車輛升降平移控制秩序,可以確定升降橫移類的立體車庫車輛存取操作流程,如圖1和圖2所示。
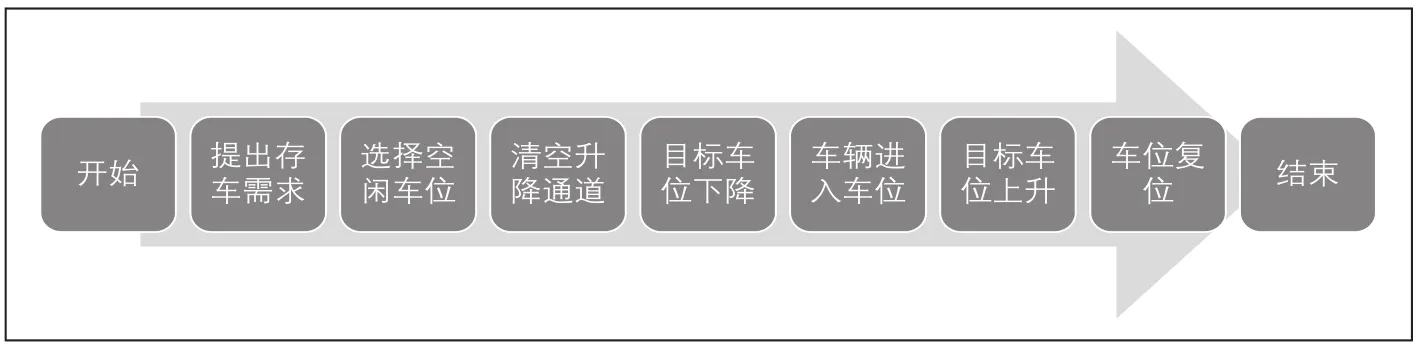
圖1 升降橫移類立體智能車庫存車流程

圖2 升降橫移類立體智能車庫取車流程
在梳理了立體智能車庫的自動化車輛存取業(yè)務(wù)流程以后,就可以依據(jù)業(yè)務(wù)流程明確車輛存取功能的功能子模塊和基本的智能控制組織結(jié)構(gòu)。具體智能車庫日常操作可以分為賬戶管理、安全監(jiān)管、手動控制、自動控制和故障報警維護(hù)五個子功能模塊,分別負(fù)責(zé)實現(xiàn)車庫日常運作過程中的各個功能需求。具體功能模塊設(shè)計關(guān)系圖如圖3所示。
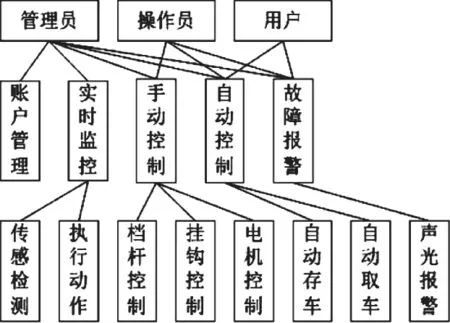
圖3 立體智能車庫系統(tǒng)的功能模塊
根據(jù)立體智能車庫系統(tǒng)的功能需求模塊,本文使用PLC主控制器,利用以太網(wǎng)PROFINET 和觸摸屏來實現(xiàn)系統(tǒng)數(shù)據(jù)的交換,建立一個集合管理員、操作員、用戶操作系統(tǒng)的智能化立體車庫管理系統(tǒng)。PLC智能車庫管理系統(tǒng)主要通過傳感器設(shè)備實時監(jiān)控車庫各功能設(shè)備的運作狀態(tài)和功能實現(xiàn)情況,并將這些監(jiān)控數(shù)據(jù)傳播到PLC主控制器,PLC按照上圖的功能實現(xiàn)關(guān)系圖,將需要操作的數(shù)據(jù)分為手動控制數(shù)據(jù)、自動控制數(shù)據(jù)和故障報警數(shù)據(jù),然后將這些數(shù)據(jù)錄入操作系統(tǒng),通過觸摸屏反饋給管理員操作平臺、操作員控制平臺和用戶自助操作平臺,用戶通過觸摸屏錄入操作數(shù)據(jù),操作數(shù)據(jù)再由PLC主控系統(tǒng)按照功能模塊關(guān)系圖,傳達(dá)給執(zhí)行設(shè)備,完成對車輛存取業(yè)務(wù)的智能操作。其具體管理系統(tǒng)結(jié)構(gòu)圖如圖4所示。

圖4 PLC立體智能車庫管理系統(tǒng)結(jié)構(gòu)圖
按照PLC立體智能車庫管理系統(tǒng)結(jié)構(gòu)圖,可以將智能管理系統(tǒng)分為控制系統(tǒng)、上位機(jī)系統(tǒng)、觸摸屏系統(tǒng)三個子系統(tǒng)。首先,控制系統(tǒng)包括由I/O系統(tǒng)實現(xiàn)的信號的收集和校驗以及由CPU主控器實現(xiàn)的數(shù)據(jù)識別、分析和處理。并再由I/O系統(tǒng)負(fù)責(zé)將執(zhí)行命令下達(dá)給各個自動化機(jī)械設(shè)備。其次,上位機(jī)系統(tǒng)主要實現(xiàn)自動化機(jī)械設(shè)備的運作狀態(tài)實時監(jiān)控。該系統(tǒng)以PC機(jī)為主要硬件設(shè)備,通過以太網(wǎng)實現(xiàn)PC機(jī)實現(xiàn)與CPU控制器之間的數(shù)據(jù)交換。最后,觸摸屏系統(tǒng)主要實現(xiàn)了智能車庫管理系統(tǒng)的操作界面,將機(jī)械設(shè)備的運作控制經(jīng)由上位機(jī)、CPU控制器將操作權(quán)限反饋到觸摸屏上,并由管理員和操作員通過實時操作觸摸屏來實現(xiàn)對機(jī)械設(shè)備的遠(yuǎn)程無線控制。同時故障報警功能模塊也可以通過實時監(jiān)控、CPU預(yù)警模塊分析,觸摸屏系統(tǒng)報警,對機(jī)械設(shè)備的異常運行狀態(tài)進(jìn)行故障分析,并將分析結(jié)果反饋到管理員處,管理員能從觸摸屏系統(tǒng)及時獲取系統(tǒng)故障狀態(tài),鎖定故障部位,簡單了解故障原因,能夠及時安排操作員和檢修人員對故障部位進(jìn)行手動校正操作和調(diào)試,對故障設(shè)備進(jìn)行維護(hù)檢修。
2 管理系統(tǒng)硬件配置
管理系統(tǒng)硬件的選擇要以穩(wěn)定性和安全性為基本原則,本文按照一般規(guī)模的立體智能車庫標(biāo)準(zhǔn)選用西門子PMI1207作為電源設(shè)備,為整個智能管理系統(tǒng)提供穩(wěn)定電能供應(yīng)。選用西門子SIMATIC S7-1200作為CPU主控系統(tǒng)。選用PROFINET通信模式實現(xiàn)上位機(jī)、控制系統(tǒng)、觸摸屏系統(tǒng)的信息交互,因此需要選用PROFINET通信交換機(jī)來組建智能系統(tǒng)的以太網(wǎng)通信網(wǎng)絡(luò)。最后,本文選用西門子KTP600的觸摸屏設(shè)備作為管理系統(tǒng)人機(jī)交互操作設(shè)備。在上位機(jī)系統(tǒng)的傳感器模塊,選用直流三線NPN常開型光電傳感器來檢測車位狀態(tài)和車位升降通道狀態(tài)。選用直流二線常開型接觸傳感器,檢測車位歸位狀態(tài)以及安全掛鉤的復(fù)位狀態(tài)。
3 管理系統(tǒng)軟件設(shè)計
PLC管理系統(tǒng)的軟件模塊主要實現(xiàn)PLC管理系統(tǒng)的自動遠(yuǎn)程控制、手動遠(yuǎn)程控制、故障預(yù)警診斷這三個主要日常管理操作功能。首先,需要設(shè)計PLC管理系統(tǒng)的初始化程序,本文以Startup(OB100)作為初始化程序編程框架,在PLC管理系統(tǒng)啟動之初,直接自動執(zhí)行OB100初始程序,將針對各設(shè)備的監(jiān)控PC機(jī)中的寄存器賦初始值,并清空各類上次數(shù)據(jù)傳輸以及數(shù)據(jù)處理產(chǎn)生的中間變量和輸出信號。在沒有接收操作指令之前,一直循環(huán)運行OB100程序,在接收指令時,由OB1程序調(diào)用FB程序制定各類操作指令的操作程序,當(dāng)FB程序運行一個周期以后,再由FB程序返回一個方法,繼續(xù)啟動OB100程序。FB程序下轄可以建立幾個具體的操作程序組,按照手動操作、自動操作、傳感器信號控制以及故障預(yù)警診斷功能特點,建立任務(wù)組、設(shè)計編程對象和程序方法,有FB程序分配各功能模塊任務(wù)組程序線程。例如系統(tǒng)程序?qū)崿F(xiàn)自動存車取車功能,就需要建立各個車位的狀態(tài)變量,將車位歸位狀態(tài)設(shè)置為變量M1.0,使用狀態(tài)設(shè)置為M2.0,運行狀態(tài)設(shè)置為M1.5,并將各個車位對象設(shè)置編號屬性、存儲車輛編號屬性、位置屬性,實現(xiàn)對車位的自動化升級操作、存車時的車位選擇、取車時的車位查找以及車位歸位狀態(tài)監(jiān)測等自動化運作。
4 管理系統(tǒng)仿真檢測
本文則完成升降橫移式立體車庫PLC S7-1200智能管理系統(tǒng)的硬件選用配置以及軟件編程以后,組裝了管理系統(tǒng)各個功能模塊的調(diào)試設(shè)備,運作軟件程序。借助博圖V13軟件進(jìn)行PLC控制系統(tǒng)的仿真功能實現(xiàn)檢測。在輸入針對各類功能模塊的操作指令夠,對PLC上位機(jī)系統(tǒng)、CPU主控制系統(tǒng)、I/O系統(tǒng)、觸摸屏系統(tǒng)的運行狀態(tài)進(jìn)行編譯,結(jié)果如圖5所示。
通過改變車位的變量,檢測系統(tǒng)自動化車位狀態(tài)識別、位置查找、升降操作、歸位操作等自動化操作狀態(tài),對PLC智能管理系統(tǒng)進(jìn)行功能實現(xiàn)仿真檢測。總結(jié)立體智能車庫PLC管理系統(tǒng)能夠穩(wěn)定、高效地實現(xiàn)車輛的自動化存取功能。

圖5 PLC控制系統(tǒng)程序編譯結(jié)果
5 結(jié)論
本文通過分析目前業(yè)界立體智能車庫在控制系統(tǒng)上的應(yīng)用現(xiàn)狀,針對立體車庫智能管理需求,從設(shè)計思路、硬件配置以及軟件設(shè)計三個方面,嘗試設(shè)計了具有智能化和效率化的車輛升降橫移立體車庫控制系統(tǒng)。同時本文利用博圖V13軟件進(jìn)行了仿真檢測,認(rèn)為本文的立體車庫智能管理系統(tǒng)具有較高的穩(wěn)定性和安全性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
軟件導(dǎo)刊(2016年9期)2016-11-07 21:35:42
通信電源技術(shù)(2016年5期)2016-03-22 01:09:49
