基于PWM整流器直接功率控制策略的研究
2020-06-22 11:27:10馮澤文
通信電源技術 2020年7期
關鍵詞:系統
馮澤文
(貴州航天林泉電機有限公司,貴州 貴陽 550008)
0 引 言
三相電壓型PWM整流器因具有高功率因數、能量雙向流動、輸入測電流諧波小等優點,在很多領域得到了廣泛應用,如靜止無功補償、有源電力濾波以及高鐵動車牽引系統等方面。同時,有很多關于三相電壓型PWM整流器的控制算法,如直接電流控制、直接功率控制、預測功率控制以及滑模功率控制等[1-3]。
直接功率控制(DPC)采用電壓外環、功率作為內環的雙環控制,用開關表實現PWM整流器輸入側高功率因數運行,輸出側直流電壓穩定輸出[4-5]。和直接電流控制相比,直接功率控制具有不受坐標變換影響、算法簡單、易實現、動態性能良好的特點。
本文采用三狀態開關滯環比較器,重新劃分扇區,設計出新的開關表進行控制。與傳統DPC控制方法相比,本文研究的控制方法改善了交流側電流諧波和系統的動態特性,解決了無功功率失控區的問題。
1 PWM整流器直接功率控制系統
根據瞬時功率理論,u為電壓空間矢量,i為電流矢量,q為無功分量,p為有功分量。將u和i用復數表示為:
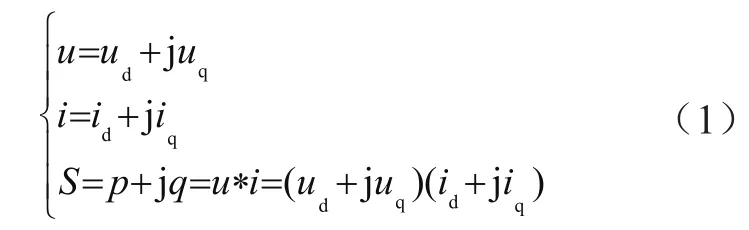
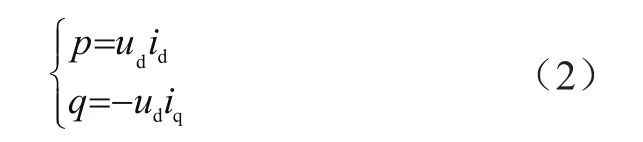
由于在PWM整流器的DCP系統中u和d軸重合,所以由式(1)可得有功功率和無功功率:
傳統的開關表采用兩狀態的滯環比較器。設定P滯環的閾值Hp,Δp=pref-p,0<Δp<Hp,SP=1,有功功率向增加的方向調節,直到Δp<-Hp、SP=0,有功功率才會向減少的方向調節。在-Hp<Δp<Hp,SP不變,沒有調節功能。在傳統開關表中SP=1時,使用零矢量(U0(000)、U1(111)),導致無功功率存在失控區[6]。由于存在失控區,系統的交流側交流電流諧波含量會很大。
2 三狀態開關表的DPC系統
為了解決無功功率失控區,本文研究三狀態開關表的DPC策略。新的開關表結構如圖1所示。
本文采用有功功率的三狀態滯環比較器進行控制,輸出如下:
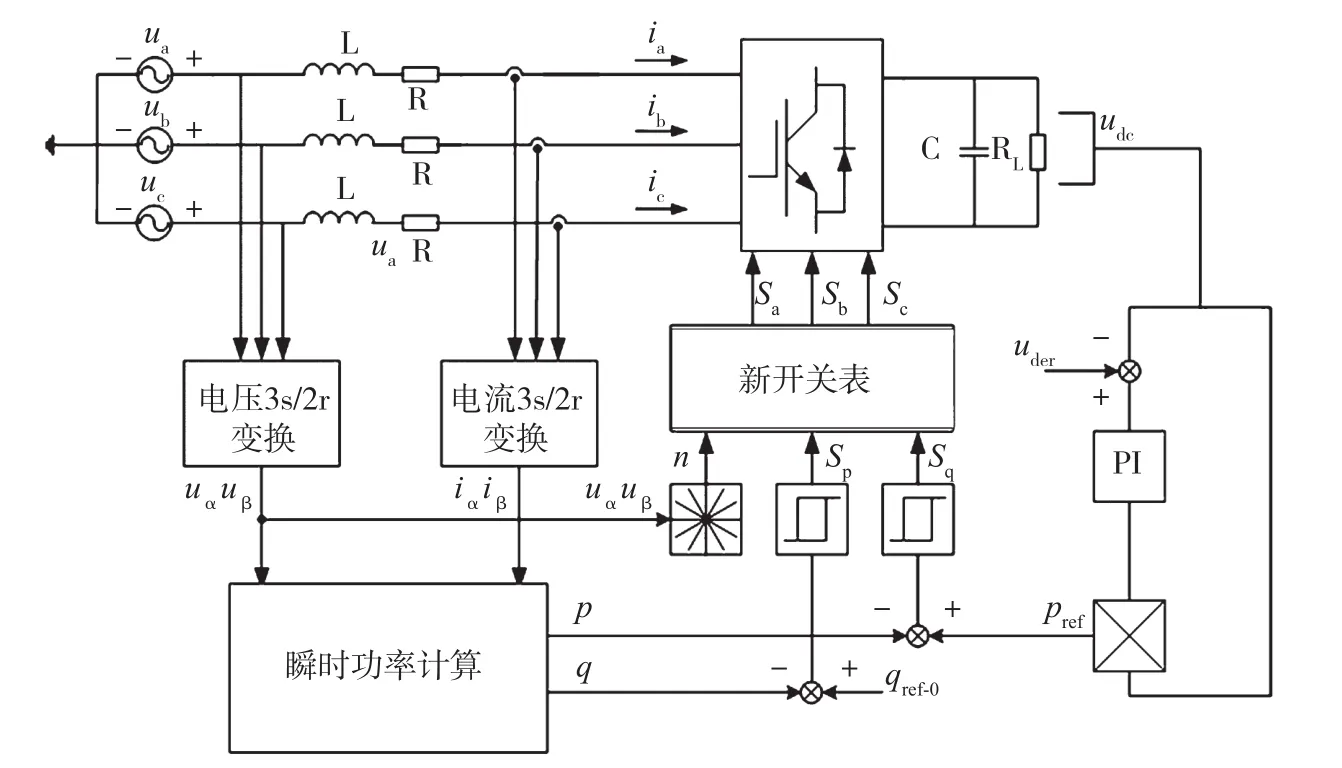
圖1 三狀態開關表的DPC策略結構框圖
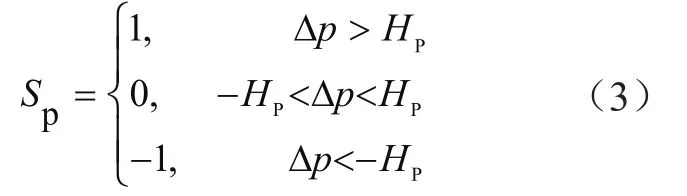
式中,當Δp<-Hp即有功功率大于給定功率時,需要對有功功率向減小的方向調節;當-Hp<Δp<Hp時,有功功率與給定功率之間相差一定的范圍,可以對有功功率向減少或增加的方向調節;當Δp>Hp時,有功功率向增加的方向調節,解決無功功率的失控區,減小系統交流側交流電流的諧波含量。
開關矢量的選擇如圖2所示。
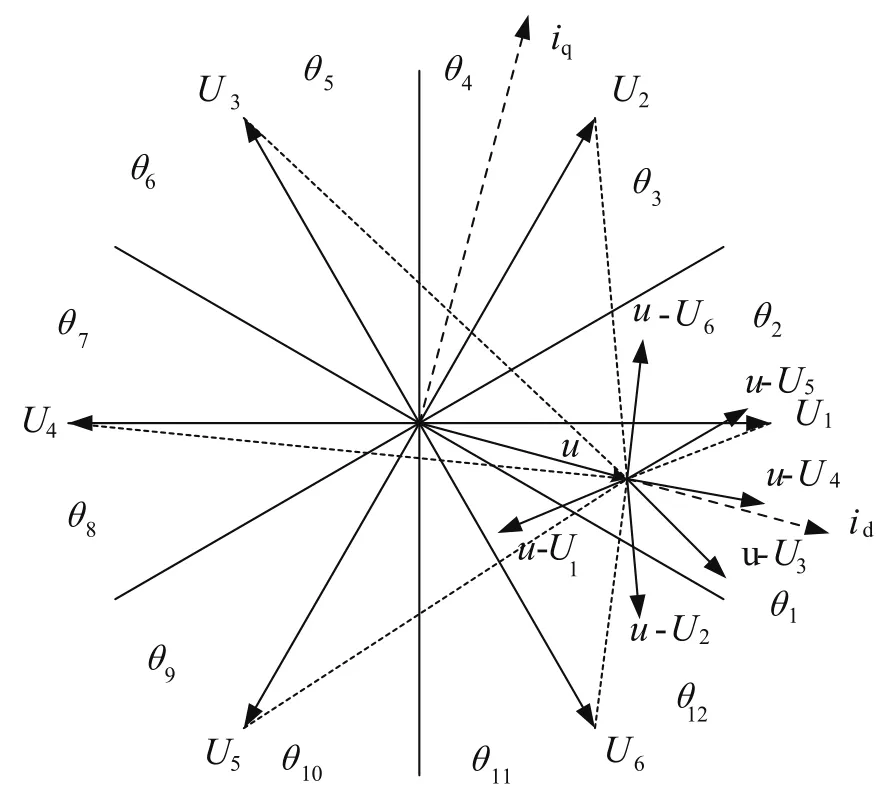
圖2 開關矢量的選擇
如圖2所示,設電壓矢量u與id軸同向。u-Ui矢量在id軸或iq軸的分量與Δp或Δq相關。由式(2)和Δp=pref-p、Δq=qref-q可知:若在id軸分量大,則說明Δp減小,反之則Δp增大;若在id軸分量大,則說明Δq減小,反之則Δq增大。根據上述分析可知,U1(100)、U6(101)都使Δp增大,有功功率減小;U2(110)、U3(010)、U4(011)、U5(001)都使Δp減小,有功功率在增加;U1(100)、U2(110)、U3(010)都使Δq增加,無功功率增加;U4(011)、U5(001)、U6(101)都使Δq減小,無功功率減小。以第一扇區為例,Δq減小,無功功率減小,就要選擇U4(011);Δq增加,無功功率增加,就要選擇U3(010)。新的開關表如表1所示。
3 仿真結果及對比分析
仿真參數:輸出電壓UDC=300 V,負載RL=60 Ω,輸入電壓幅值Um=100 V、頻率f=50 Hz,輸入電阻R=0.3 Ω,電感L=0.003 H,電容C=1 000 e-6F。外環的PI參數:比例系數Kp=0.3,積分系數Ki=30。
由圖3、圖4可知,采用三狀態開關的DPC系統輸入電壓和電流同相位,波形的正弦度更好;由圖5、圖6可知,解決了無功功率的失控區,系統的無功功率波形得到明顯改善,有功功率波形也改善明顯。
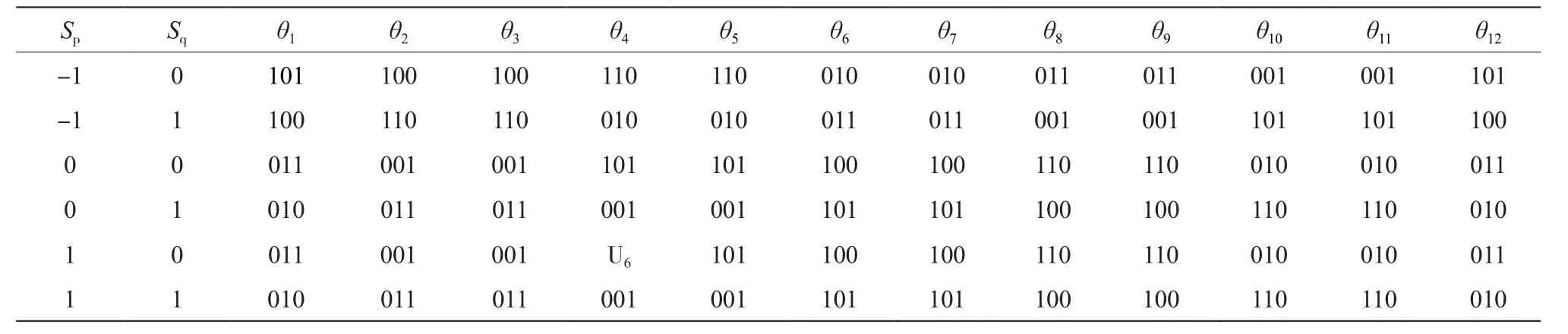
表1 三狀態開關表
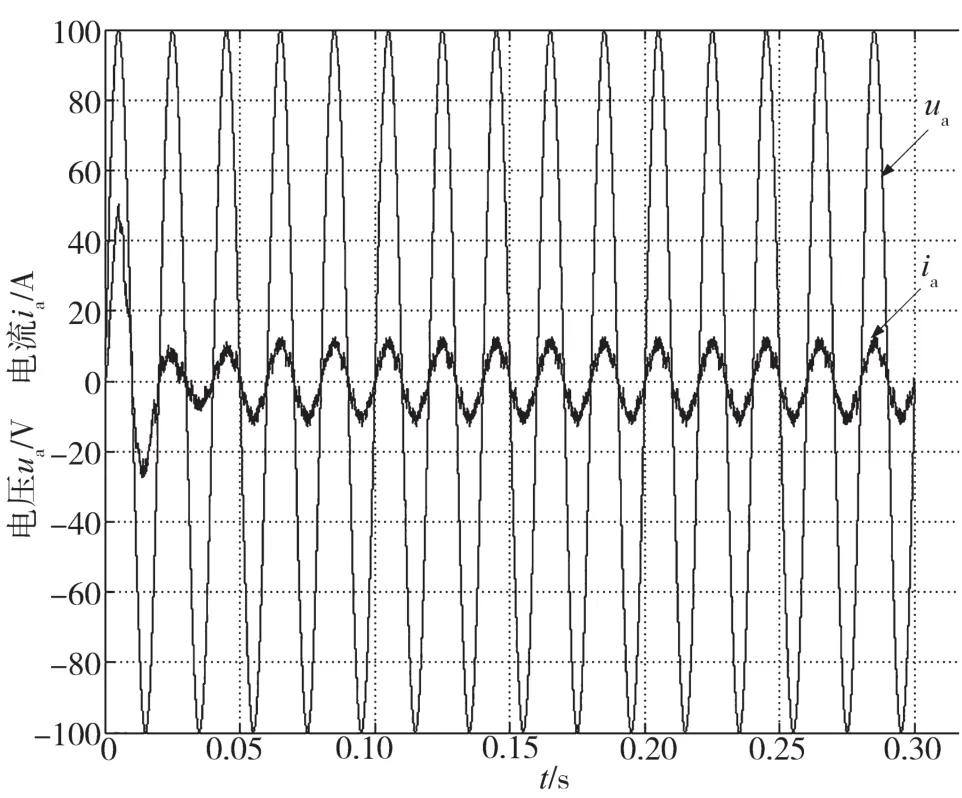
圖3 傳統DPC系統的輸入電壓電流波形
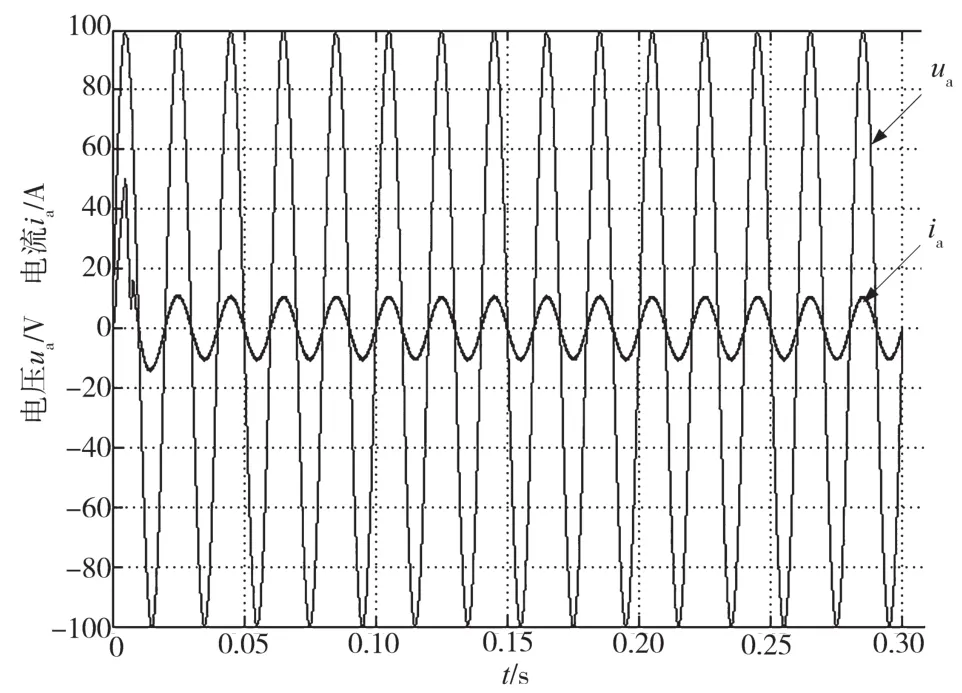
圖4 三狀態開關下系統的輸入電流THD波形
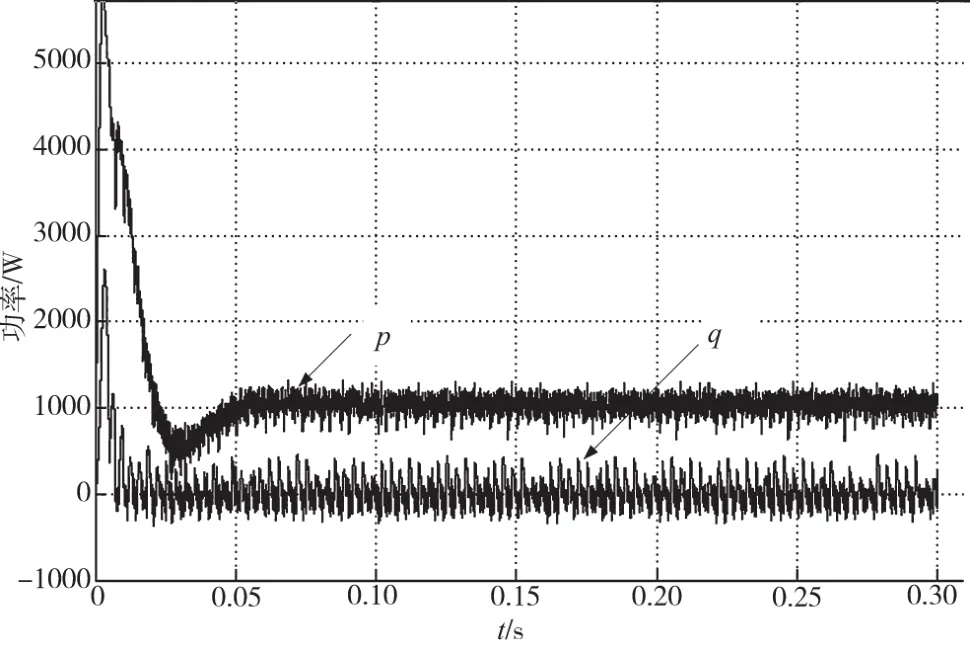
圖5 傳統DPC系統的有功功率和無功功率波形
4 結 論
通過理論分析,傳統的三相電壓型PWM整流器的直接功率控制采用兩狀態開關的滯環比較器,無功功率存在失控區,輸入端電流諧波含量大。采用三狀態開關的滯環比較器,通過理論分析和仿真驗證,解決了無功功率的失控區的存在,減少了輸入端電流的諧波含量,同時改善了系統的動態特性。仿真實驗驗證了三狀態開關的DPC控制方案的正確性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32