數字能見度儀中目標物自動定位技術①
2020-06-20 07:32:26陳凱華王京麗
計算機系統應用 2020年6期
雷 鳴,王 琪,聶 凱,陳凱華,王京麗
1(天津市氣象局 天津市氣象信息中心,天津 300074)
2(北京市氣象局 北京市氣象探測中心,北京 100089)
3(中國氣象局 北京城市氣象研究所,北京 100089)
隨著經濟快速發展和現代化交通工具的不斷普及,機場、公路交通以及航道對能見度的依賴日趨突出[1].尤其近年,我國各地區霧霾天氣不斷加劇,持續低能見度天氣導致的惡性交通事故時有發生.可見,能見度的實時觀測與預報日趨成為不可或缺的重要內容.但能見度的觀測現狀卻與實際需求相差甚遠.
目前,國內外對能見度的探測雖有成熟產品,但價格和性能之間很難調和[2-5]:觀測效果較佳的儀器價格過高.反之,價格較低的儀器觀測效果又不理想.
而基于CCD 數字攝像技術,在我國始于上世紀末研制的數字攝像能見度儀(Digital Photography Visiometer System,DPVS)[6-11],不但觀測效果較為理想,而且物美價廉.DPVS 仿照人眼觀測能見度原理,完全遵照能見度定義研制,在國內外尚屬首創,是能見度觀測的理想儀器.但也因為是創新產品,因此存在一些研發障礙.
本文正是基于圖像配準技術,解決DPVS 中觀測目標物自動搜索和準確定標問題.這是視頻能見度觀測中急待解決的首要科學難題,也是多年來視頻能見度觀測研究中急待解決的主要科學難題.因為定標略有偏差,觀測準確率就會受到嚴重影響.這是因為能見度的觀測值大小取決于目標物和天空背景之間的亮度差異(或亮度對比度)[12-15].當目標物的亮度出現偏差的時候,將會直接影響觀測的準確性.因此,只有實現目標物自動和準確定標,才能實時定位目標物,始終保持定標準確.這是確保數字能見度儀觀測準確率的關鍵.
模板匹配是匹配算法當中的經典算法[16,17].但是這種匹配技術存在匹配耗時長,且無法抵抗旋轉的問題.但DPVS 在觀測時,其攝像頭在地面震動或者大風吹動的情況下,會存在一定小角度的旋轉以及抖動等情況.因此,針對實際情況,本文將模板匹配算法改動,提出針對小角度旋轉匹配不變的一種快速算法,該方法使匹配時間呈指數級數減少,極大地提高了計算速度,并能抵抗一定角度的旋轉.
1 卷積與模板相關運算
卷積運算簡單快速,是圖像處理中的常用算法.本文利用卷積運算與模板運算之間的相似性,將模板相關算法和卷積進行有效融合,得到快速的目標自動搜索與定位算法.
1.1 卷積運算
針對二維圖像,設x與y為兩獨立變量,其卷積公式如下所示[18]:
而對于圖像卷積公式,因為其自變量取整數,故雙重積分,可改為雙重求和.則有:
式中,F是圖像,G是卷積核,H是圖像進行卷積后的結果.
1.2 互相關算法
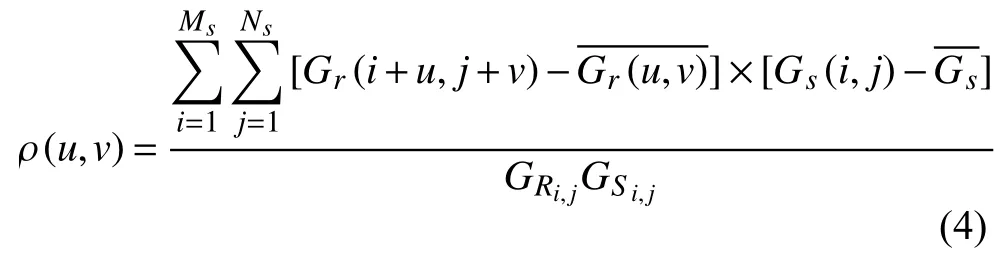
進行圖像匹配定位時,設大小為Mr×Nr的基準圖為Gr,大小為Ms×Ns的模板為Gs,并且基準圖大小要大于模板,即Ms<Mr,Ns<Nr.則模板與其覆蓋下的對應子圖Gr(u,v)之 間的去均值歸一化互相關度量ρ(u,v)((u,v)為基準圖左上角),可用下式計算[19]:

其中,- 1 ≤ρ(u,v)≤1,Gs和Gr(u,v)分別為Gs和Gr(u,v)的灰度均值.ρ最大之時,正是模板與基準圖中所對應子圖最相關之處,即為所求.
2 互相關算法的改進
光受卷積啟發,針對互相關算法公式進行簡化,使之具備與卷積相同的運算模式,極大降低算法的計算量.
在式(3)中,將其分母的兩項分別設為:
代入(3)式中,則有:
為了降低計算復雜度,考慮以模板為基準,即其他圖像與模板的相似程度,而非與模板的互相似程度.因此式(4)可用模板的各像素平方之和來進行歸一化.同時,假設在此計算的是二值圖像,二值化圖像通常僅存0 與255 或0 與1,則可以消去灰度均值的計算.因此,式(4)可簡化如下:
顯然,式(5)中的分母是固定常數,是模板各像素平方的和,設為K,則公式可進一步簡化為下式:
其中,0 ≤ρ′≤1,此時,上式已經和卷積計算式(2)高度相似.
因為是二值圖像,若圖像中像素是0 與1,則上式計算本質上,和兩圖像對應像素“與運算”之和的結果等效.否則就與兩圖像對應像素“與運算”結果平方之和的結果等效.用數學表達式,可描述如下:
式中,“·”代表“與運算”.因為Gr與Gs僅在有限范圍內非零,所以計算僅需在非零部分重疊的區域進行即可.這大大降低了計算復雜度,無論對算法硬件的實現還是對計算的快捷性均具有極大的價值.
需要指出的是,ρ′的計算僅僅基于模板為基準.因此當基準圖中模板覆蓋對應下的子圖Gr(u,v)像素值全部都是n時,將會導致ρ′=1的錯誤匹配.針對此種情況,設模板對應的子圖像素值之和為 Σ ,令Δ <Σ ≤T,T是模板像素的和,Δ可以根據需要調節,本文取Δ =T/2.這樣,實際匹配的過程中,僅計算模板對應的子圖像素值之和在此范圍之內的即可,從而進一步加速算法的計算速度.
3 目標自動捕獲和識別流程
以目標黑體為例(目標光源自動定位與黑體類似,過程不再贅述),其流程如圖1所示.

圖1 黑體自動搜索定位流程圖
4 實驗分析
以為了驗證算法的有效性,將算法整合在DPVS系統中,透過在DPVS 中使用和去除本文算法來進行能見度觀測結果的對比,來進行分析本文算法的有效性.
實驗觀測場所選在北京市觀象臺.觀象臺是國家基準氣候站,功能完備,擁有專業的人工觀測員與各類觀測儀器和高分辨率的能見度人工觀測數據,以及各類豐富完整的氣象要素觀測數據,是開展能見度儀觀測分析的理想站點.
現將利用本文算法定標前后的效果圖,顯示如圖2~圖5.
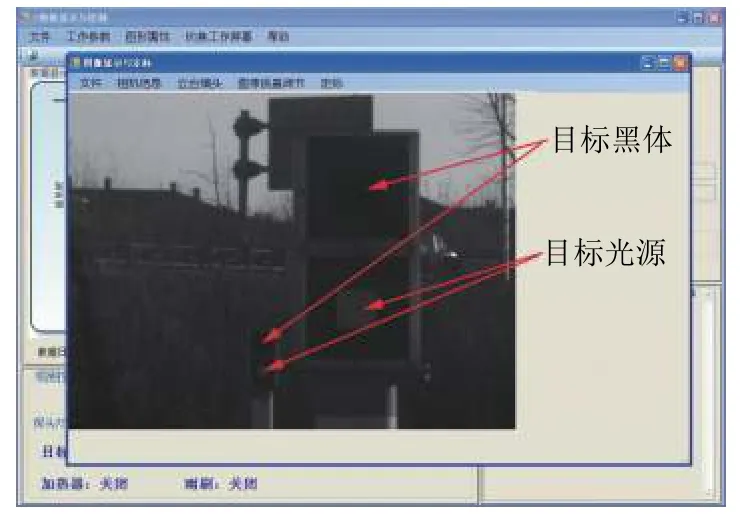
圖2 數字相機攝像中未定標的黑體和光源(白天)
圖3 數字相機攝像中未定標的黑體和光源(夜晚)
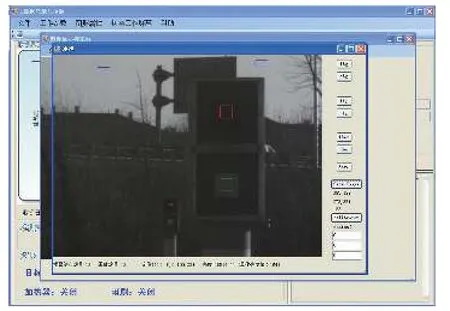
圖4 數字相機攝像中定標后的黑體和光源(白天)

圖5 數字相機攝像中定標后的黑體和光源(夜晚)
相機抖動會造成背景圖發生相對定標框的偏移或旋轉.在實際中,定位的目標是保證定標框能自動定位到正確位置.因相機抖動造成的旋轉和移動不宜量化.為驗證算法的有效性,一方面可透過視頻窗直接觀測定位效果進行判斷,如圖5所示.另一方面,可以利用單幀背景圖,以1 度為單位,進行旋轉仿真實驗,定標框只要落在光源區即認為定位正確,即為1.否則,定位失敗,即為0,則有如圖6關系圖.
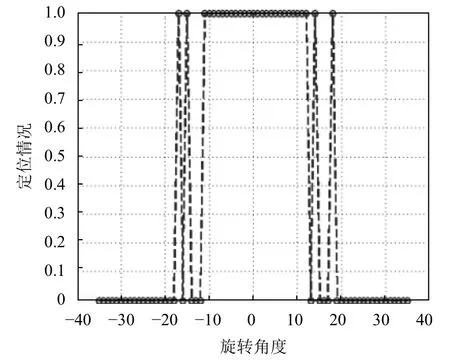
圖6 旋轉角度與定位關系
可以看到,當角度旋轉在一個較小的角度內時(大約[-10,10]之間),本文算法能夠保持比較穩定的定位準確性.而上圖是顯得較小的第二光源所得角度與定位間的關系圖,第一光源因為面積較大,故抗旋轉性略強,角度范圍大致在[-15,15]之間.黑體與光源類似,不再贅述.
系統于2017年7月12~13日和22~23日,將本文快速定位算法在能見度觀測系統上進行了功能去除.獲取的實驗觀測系統顯示圖,如圖7所示.
現將加入本文算法,現階段系統的觀測效果圖顯示如圖8~圖10所示.
圖8~圖10中,DPVS_77 為DPVS 系統觀測,DNQ2-1 為國產的(無錫)前向散射儀觀測,PWD22 為進口前向散射儀觀測,LT31 為透射儀觀測.
為了進一步檢驗本算法的有效性,考慮到手工目標定位的難度,考慮從2018年8月的數據中,按觀測距離進行隨機抽樣.為了便于分析,將能見度(簡稱V,以下同)觀測數據從低到高分為4 組,即:小于2 km、2-5 km、5-10 km、10-15 km.首先以DPVS、LT31、PWD22 及DNQ2-1 等4 種觀測數據的平均值作為標準值,分別計算每個數據段DPVS 和LT31 與標準值之間的相對誤差和相對標準差.相對標準差計算公式如
式(8)所示:
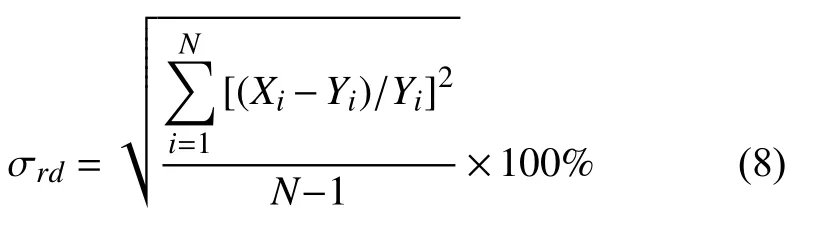
其中,X為DPVS 或LT31 的測量值,Y為DPVS、LT31、PWD22 以及DNQ2-1 這4 種觀測數據的平均值,N為樣本個數.具體分析結果詳見表1.基準圖大小皆為640×480.普通算法,即互相關算法(以下同).手動定位精度和手動定位的頻率密切相關,考慮到實際可操作性,這里的頻次為1 小時重新定位一次.因為手動定位沒有辦法統計定位時間,也無實際意義.因此,這里僅將本文算法單次定位耗時與普通算法耗時對比如表2所示.
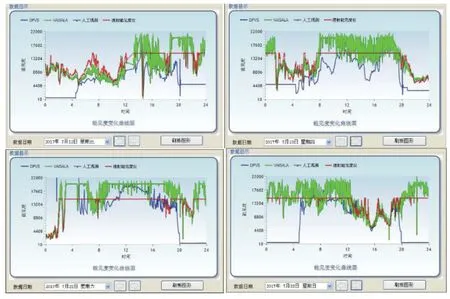
圖7 DPVS 系統能見度觀測效果圖
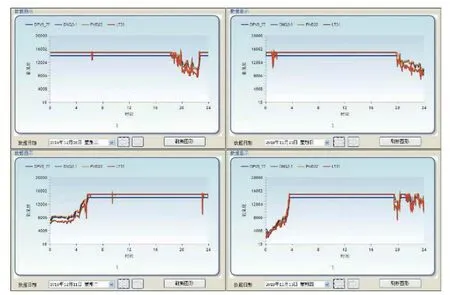
圖8 高等能見度-DPVS 系統能見度觀測效果圖
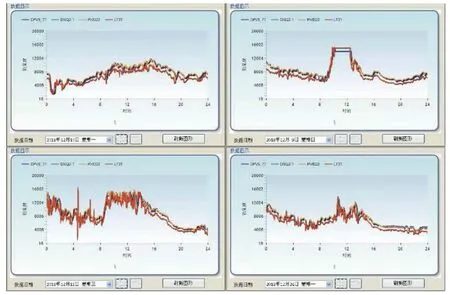
圖9 中等能見度-DPVS 系統能見度觀測效果圖
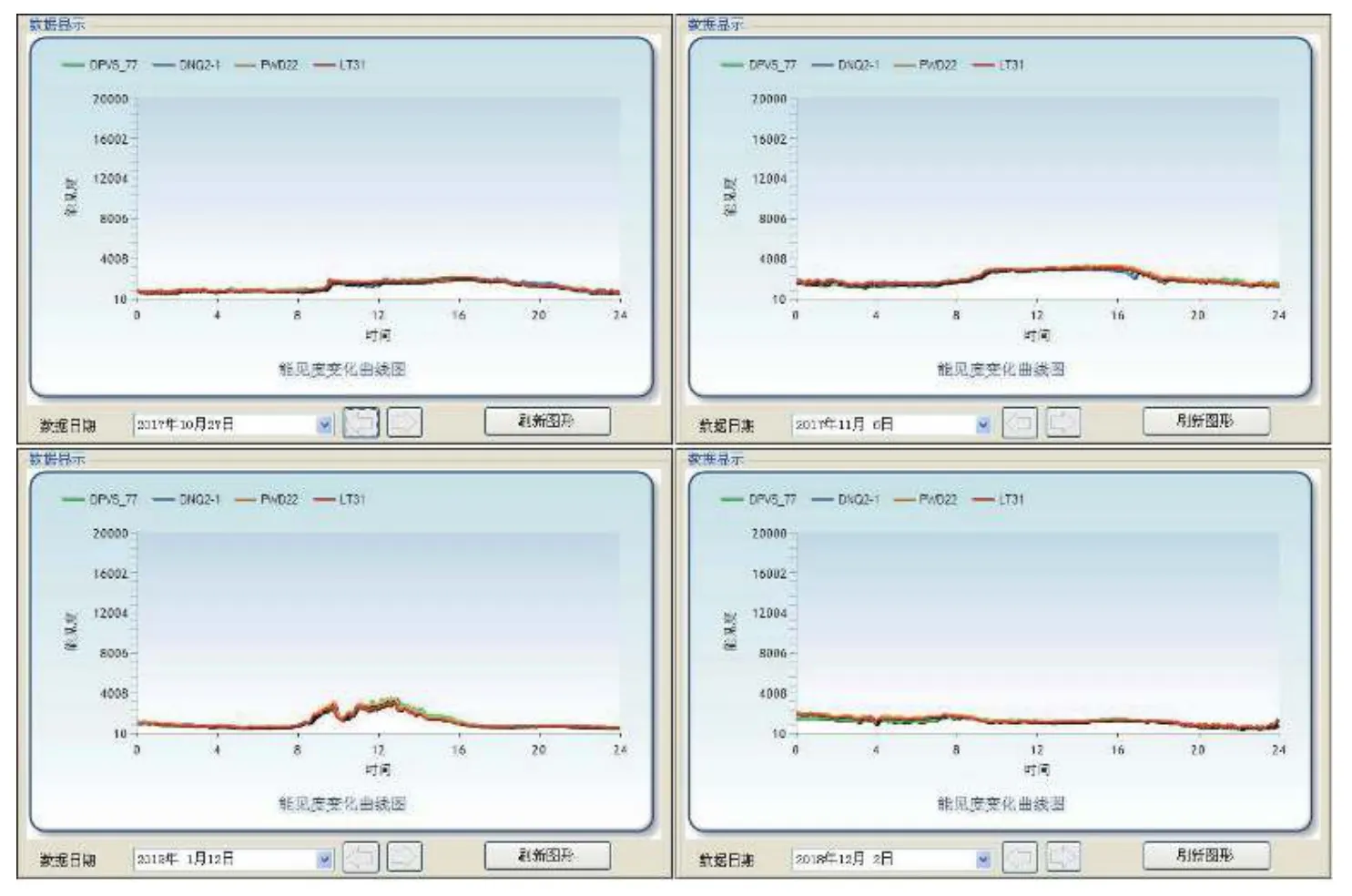
圖10 低等能見度-DPVS 系統能見度觀測效果圖
本文算法的優越性顯而易見,觀測準確度比普通算法提升7 倍多,比手動定位觀測提升將近5 倍,而匹配速度比普通算法平均提升200 多倍.而本文算法與LT31 和標準值的相對標準差都在20%之內,均符合世界氣象組織對能見度儀研制標準的要求.
普通算法目標定位之所以引起的觀測誤差最大,是因為算法雖然能夠進行自動定位,但匹配速度不夠,無法在有效觀測時間內(單次觀測還需要亮度調節、視頻圖像抽取和處理等其他耗時過程),及時自動定位,導致觀測失敗.同時,原有算法的抗旋轉能力較弱,會陷入局部最優,導致錯誤定位,進而加劇觀測的誤差.
手動定位,在鏡頭相對比較穩定的情況下(無大風或者車輛等外在原因引發的鏡頭震動),人工定位的代價還可以接受,且觀測準確度還是比較高的,但是這種無震動的條件不符合現實,在實際中往往需要不斷的進行定位以對抗震動引發的定位偏離.這種人工操作,代價太大.
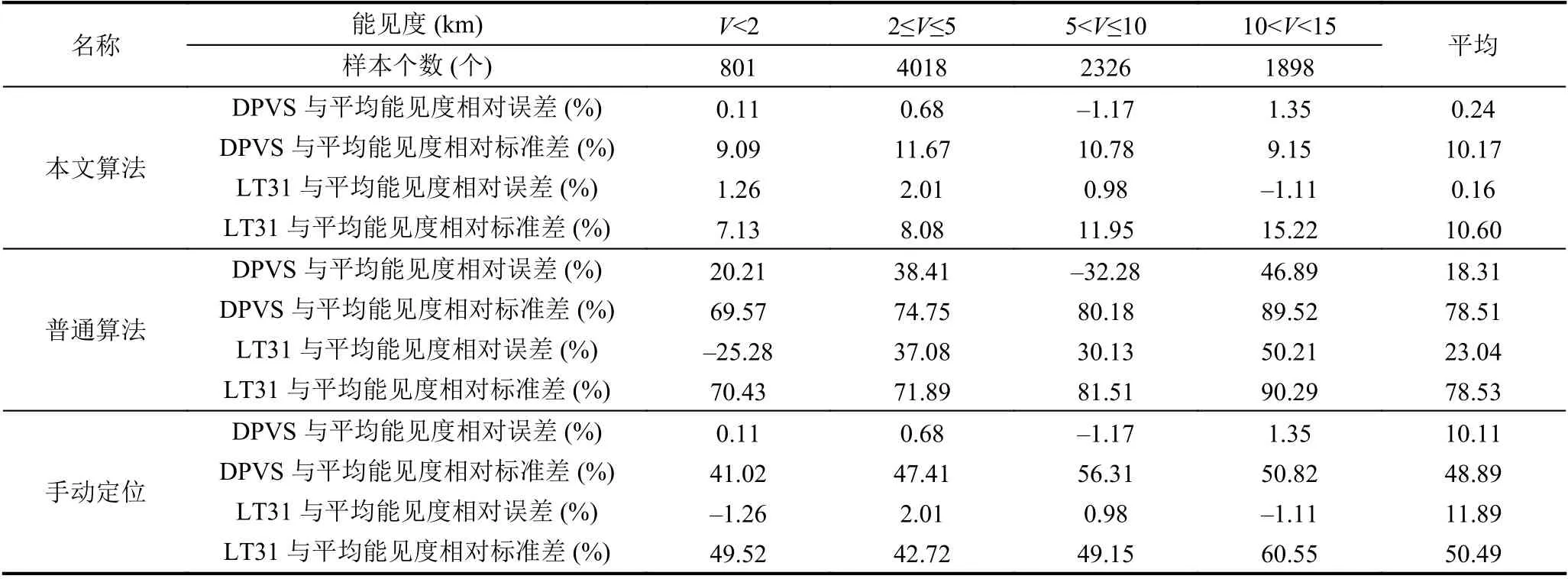
表1 能見度觀測數據對比表
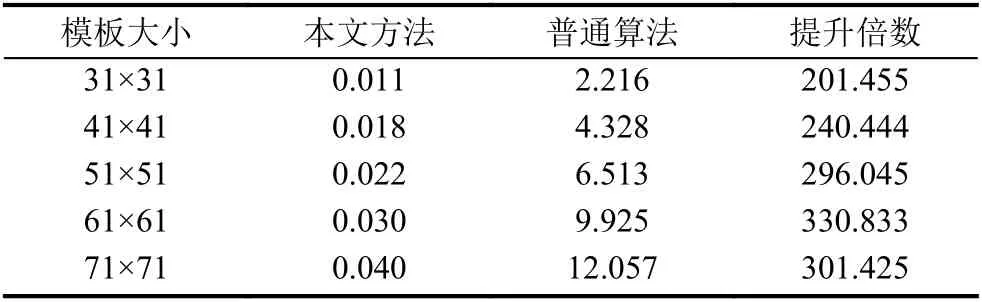
表2 能見度觀測數據對比表(單位:s)
綜合對比分析數據,可知本文算法效果最佳.在進行自動定位時,本文算法單次定位耗時平均在24.2 ms左右,遠遠小于最小的單次觀測時間間隔:1 min.而且本文算法定位精度高,一方面是因為增加了定位策略,使搜索集中在最大可能區域,另一方面因為修改了互相關的算法,大大消弱了定位時的相關性,從而提升了對鏡頭晃動所引發的圖片微小旋轉的抵抗力.
5 結論與展望
通本文針對數字攝像能見度儀因相機震動造成的目標物定位偏離問題,提出了一種快速自動定位解決技術,確保準確獲取數字攝像能見度儀實際觀測時的目標物,即黑體和光源的亮度,為準確計算大氣能見度提供了有效支撐.大量實驗表明該方法的有效性.作為一種新型的、唯一符合能見度定義的大氣能見度觀測儀,DPVS 具有多種優點:仿照人眼觀測能見度原理,完全遵照能見度定義研制設計,其安裝便捷、成本低廉,是最適合取代人工觀測能見度的儀器.而隨著CCDCAMERA 技術的迅猛發展,其成本不斷下降,而分辨率卻不斷提升,早已達到與人眼相當的千萬像素級.因此,DPVS 具有廣闊良好的應用前景.
