基于改進螢火蟲優化算法的汽車懸架PID控制
2020-06-19 08:45:58李勝孫藝瑕劉建均
軟件導刊 2020年4期
李勝 孫藝瑕 劉建均
摘 要:為了獲得更好的汽車平順性,構建1/4汽車主動懸架模型,采用懸架動撓度、車身動位移、輪胎動載荷和輪胎垂直速度等4項指標進行近似衡量,提出基于改進螢火蟲優化算法(FA)的汽車懸架PID控制,并與基于LQR控制、基于Fuzzy-PID控制下的汽車懸架平順性進行對比。仿真結果顯示,基于改進FA優化的PID控制的4項指標峰值均大幅降低,峰值最高下降36.1%,證明基于改進螢火蟲優化算法的PID控制可提高汽車平順性能。
關鍵詞:LQR控制;Fuzzy-PID控制;汽車懸架系統;FA-PID控制
DOI: 10. 11907/rjdk.191772
開放科學(資源服務)標識碼(OSID):
中圖分類號:TP319
文獻標識碼:A
文章編號:1672-7800(2020)004-0179-04
0 引言
汽車舒適性主要依賴于汽車懸架。汽車懸架可分為主動和被動兩種,被動懸架結構簡單,早期應用較廣[1]。然而,被動懸架的參數固定,在外界激勵頻率發生變化時,隔振有效性降低,而主動懸架可有效克服該缺點,因此逐漸得到市場肯定與學者們的關注。
周長城[2]考慮平順性與安全性等評判因素,研究了主動汽車懸架設計和控制的相關問題;Bharali等[3]建立1/4汽車懸架模型,提出了線性二次型控制(IQR)、模糊PID控制與基于LQR的模糊控制等3種控制器,其仿真結果表明,基于LQR的模糊控制主動懸架隔振性比其它兩種主動懸架更佳;么鳴濤等[4]以汽車懸架動撓度為控制器輸入變量,建立模糊PID控制器,其仿真結果表明,模糊PID控制既改善了汽車平順性能,也提高了響應速度;Chao等[5]提出用重力搜索算法( GSA)確定主動汽車懸架系統模糊PID控制器的最優控制參數,其研究結果表明,CSA可以調整PID控制器參數以達到最佳性能;Wang等[6]建立1/4汽車懸架模型,以車體垂直加速度為控制目標,提出了模糊PID控制策略,并利用改進的文化算法對模糊規則進行優化,實驗結果表明,該控制可顯著抑制車身加速度、提高乘坐舒適性;Song等[7]為改善懸架系統強非線性與不確定性,通過泰勒公式變換將懸架系統轉化為兩個不同的線性子系統,設計了基于遺傳算法的PID控制器,其仿真結果表明,經遺傳算法優化后PID控制懸架系統具有良好的魯棒性。綜上所述,目前對平順性評價指標與控制方法的對比研究較少。因此本文提出構建1/4主動汽車懸架模型,以PID控制器參數為優化參數,以多指標的汽車平順性能為目標,提出基于改進螢火蟲優化算法的PID控制策略。此外,將基于改進FA-PID控制的汽車懸架與基于LQR控制、基于Fuzzv-PID控制的汽車懸架進行平順性對比分析。
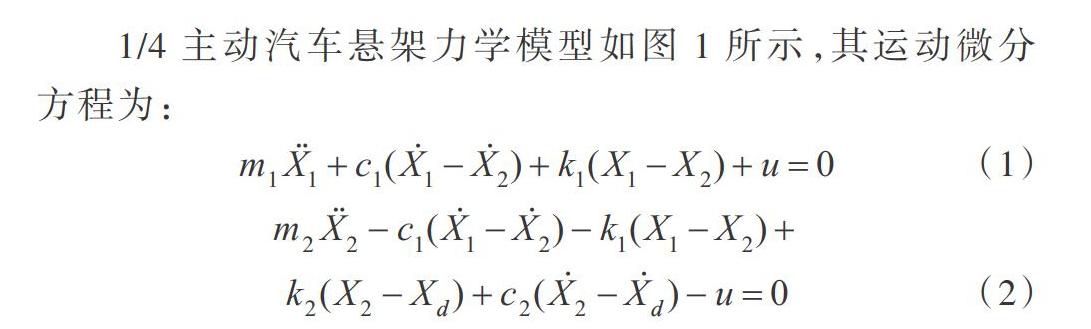
1 汽車懸架模型
3 Fuzzy-PID控制
本部分內容為Fuzzv-PID控制器設計,主要指將Fuzzy控制器輸出端與PID控制器輸入端相連接,形成一種新的控制器[13-15]。這種復合控制器適應更多工作環境下的控制
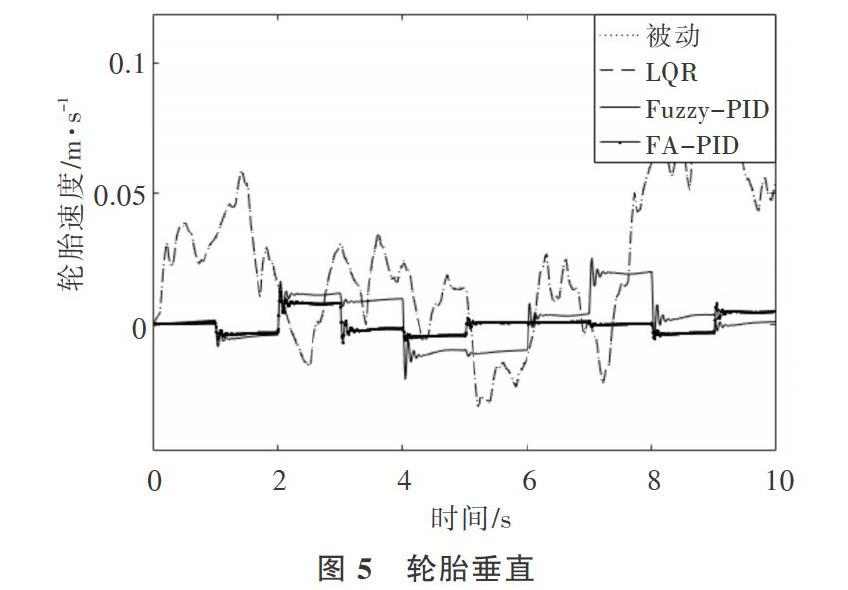
5.2不同汽車懸架效果對比
為證實改進FA-PID控制器對汽車懸架平順性控制的有效性,將基于改進FA-PID控制的懸架與被動控制、基于LQR控制、基于Fuzzv-PID控制的懸架控制效果進行對比,仿真結果如圖2-5所示[20]。
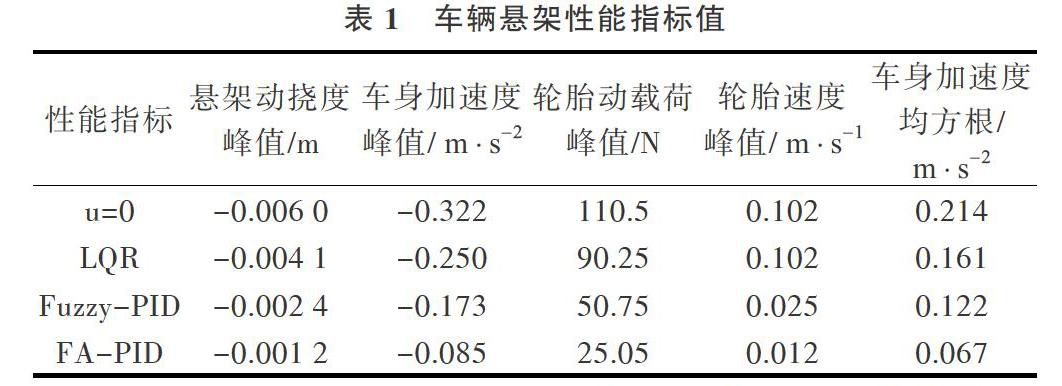
表1給出了被動懸架與其它3種主動汽車懸架的懸架動撓度、車身加速度、輪胎動載荷、輪胎速度峰值及4種懸架的車身加速度均方根值。
從表1可以得知主動懸架的懸架動撓度、車身動位移、輪胎動載荷以及輪胎速度峰值較被動懸架最少下降31.6%、22.5%、18.3%和0%。基于LQR控制、基于Fuzzy-PID控制與改進FA-PID控制懸架的車身加速度均方根較被動懸架分別降低24.8%、42.9%和68.69%。
6 結語
螢火蟲算法優化后的PID控制器對汽車懸架系統擁有更好的隔振效果,懸架平順性優于其它幾種控制方式。就懸架平順性而言,單- LQR控制較復合Fuzzy-PID、FA-PID控制稍顯遜色。基于改進FA-PID控制的懸架比LQR控制與Fuzzy-PID控制的懸架,在被動懸架車身加速度均方根方面下降了43.89%和25.79%。本文不足之處在于沒有考慮時滯影響及非線性特性,這是下一步研究方向和重點。
參考文獻:
[1] 李瓊.基于DSP的半主動懸架預測控制器的研究與開發[Dl.成都:西華大學,2009.
[2] 周長城.汽車平順性與懸架系統設計[M].北京:機械工業出版社,2011.
[3]BHARALI J, BURAGOHAIN M. Design and performance analysis offuzzy LQR; fuzzy PID and LQR controller for active suspension sys-tem using 3 degree of freedom quarter car model [C]. Delhi: 2016IEEE lst International Conference on Power Electronics, IntelligentControl and Energy Systems, 2016.
[4] 么鳴濤,曹鋒,闕瑞義,等.考慮汽車懸架動撓度的模糊PID控制[J].北京理工大學學報,2016, 36(9):929-934.
[5]CHAO C T,LIU M T,CHIOU J S,et al.A GSA-based adaptive fuzzyPID-controller for an active suspension system[ J]. Engineering Com-putations, 2016, 33(6):1659-1667.
[6]WANC W. SONG Y, XUE Y, et al.An optimal vihration control strate-gy for a vehicle's active suspension based on improved cultural algo-rithm[J]. Applied Soft Computing, 2015, 28( C): 167-174.
[7]SONG R R.The design and optimization of PID suspension controllerbased on genetic algorithm [J]. Applied Mechanics and Materials,2017. 865:492-495.
[8]SUN W, CAO H, KAYNAK O.Finite frequency, control for vehicleactive suspension systems[Jl. IEEE Transactions on Control SystemsTechnology, 2011, 19(2):416-422.
[9]MITRAA C,DESAIG J,PATWARDHAN S R. et al. Optimization ofpassive vehicle suspension system by genetic algorithm [J]. ProcediaEngineering, 2016, 144: 1158-1166.
[10]RIOFRIO A. SANZ S,MJL B, et al.A LQR-Based controller withestimation of road bank for improving vehicle lateral and rollover sta-bilitv via active suspension[J]. Sensors, 2017, 17( 10): 2318.
[11]王亞雄,蔡宇萌,王健,等.汽車側傾運動安全主動懸架LOG控制器設計方法[J].交通運輸工程學報,2017,17(5):138-148.
[12]龍金蓮,張玉分,盧家暄,等.汽車主動懸架LOR控制器平順性控制仿真[J].計算機仿真,2018. 35(4):107-111
[13]魏健雄,萬舟.基于神經網絡PID的氣墊船轉艏角速度保持控制研究[J].軟件導刊,2018,17(3):18-22.
[14] 盛平,朱慶夫.基于模糊PID控制器的葉菜溫室測控系統設計[J].軟件導刊,2017,16(6):100-103.
[15]PANG H. LIU F,XU Z.Variahle universe fuzzy control for vehiclesemi-active suspension system with MR damper combining fuzzyneural network and particle swarm optimization[J].Neurocomputing,2018( 306):130-140,
[16] 王德望,趙敏.污水處理系統溶解氧的BP-PID控制算法[J].軟件導刊,2018,17(2):68-70,73.
[17]MAHMOODABADI M J,FARHADI F,SAMPOUR S.Firefly algo-rithm based optimum design of vehicle suspension systems[J].Inter-national Journal of Dynamics and Control. 2018(3):1-13.
[18] 李恒.改進的螢火蟲算法及其在PID控制器參數整定中的應用[D].合肥:安徽大學,2017.
[19]檀潤華.路面對汽車激勵的時域模型建立及計算機仿真[J].中國公路學報,1998(3):96-102.
[20] 張好好.汽車半主動懸架控制策略及聯合仿真研究[D].西安:長安大學,2016.
(責任編輯:江艷)
作者簡介:李勝(1994-),男,上海工程技術大學機械與汽車工程學院碩士,研究方向為振動主動控制及時滯動力系統的實驗實現;孫藝瑕(1983-),女,博士,上海工程技術大學講師、碩士生導師,研究方向為時滯動力系統;劉建均(1991-),男,上海工程技術大學機械與汽車工程學院碩士,研究方向為時滯動力系統參數優化。本文通訊作者:孫藝瑕。