一種提高室內定位精度的模糊邏輯方法
2020-06-19 08:45:58張峻豪朱海韓寶磊
軟件導刊 2020年4期
張峻豪 朱海 韓寶磊
摘要:超寬帶技術由于其精確的定時分辨率,在視距(LOS)和非視距(NIOS)混合環境中應用前景廣闊。為提高跟蹤精確度、消除與UWB跟蹤系統測距數據集異常值,構建合適的誤差抑制方法,提出一種誤差抑制方法。首先對環境進行建模,分析LOS和NLOS環境中的信號參數;然后,采用基于模糊邏輯的兩步自適應定位算法,分析和選擇最佳測距數據,用于計算被跟蹤設備的位置;使用模糊加權最小二乘估計(rWLSE)方法對非視距(NLOS)混合環境中的實際數據進行測試。實驗結果表明,與其它已知算法相比,該方法定位精度顯著提高18.28%.且在實際應用中易于實現。
關鍵詞:室內跟蹤;超寬帶;模糊邏輯;加權最小二乘估計
DOI: 10. 11907/rjdk.192033
開放科學(資源服務)標識碼(OSID):
中圖分類號:TP301
文獻標識碼:A
文章編號:1672-7800(2020)004-0097-05
A Fuzzy Logic Method for Improving Indoor Location Accuracy
ZHANG Jun-hao . ZHU Hai. HAN Bao-lei
(School of Electronic and Electrical Erzgineering , rShanghai Univer.sity of Engineering Science , Sh.anghai 20 1 620. China )
Abstract: Ultra widehand (UWB) technology has been proven to be a promising technology in complex environruents due to its f'inetiming resolution. In this work . we f'ocus on error mitigation to improve the accuracy of' the tracking and elimination of outliers in rang-ing data sets associated with UWB tracking systems. We f'irst model the environment to analyse the behaviour of the signal parametersin both LOS and NLOS environments. Then. we apply a two-step adaptive algorithm for the localisation based on a fuzzy logic ap-proach f'or analysing and selecting the best ranging data to be used in the computation of the tracked device location. Our proposed ap-proach of using fuzzy logic-WLSE (FWLSE ) has been tested with real data collected in a heavy NLOS environment. which has demon-strated a significant gain in the localisation accuracy . This level of' improveruent can reach up t0 18% when compared to otherwell-known algorithms "-' hich are described in the relevant literature and the method is easy to implement in practical applications.Key Words : indoor tracking; ultra wideband; fuzzy logic; weighted least squares estimation
O 引言
超寬帶(UWB)頻率傳輸依靠強大的信號機制、穿透墻壁的傳播能力、對多徑效應的強大抗擾性和高分辨率測距等性能使其定位比其它技術更精確[1-3]。然而,UWB跟蹤系統部署由于在與非視距(NLOS)傳播方面存在眾多技術挑戰,導致商業推廣沒有完全實現[4-5],特別是非視距混合環境和多徑效應[6]造成的異常值對定位精度有顯著影響。
解決該問題的方法有兩種:信道識別和誤差緩解[7-8]。第一類方法通過區分視距和非視距環境實現精確定位,第二類方法通過分析測距誤差縮小非直瞄測距誤差。第二類方法使用迭代最小二乘估計(LSE)[9],該方法計算簡單且有效。然而,在室內環境存在多路徑信號時,LSE性能較低[10]。因此,需要更為密集和復雜的方法縮小誤差[11]。文獻[12]提出的最小修剪平方算法和文獻[13]提出的最小中值平方方法由于沒有剔除目標位置結算中的測距誤差,無法進行優化。為了克服這些限制,需將接收的測距數據進行優化;文獻[14]提出一種基于兩步統計的線性最小二乘法(LLS),使用統計方法消除非視距偏差,通過邊界框算法獲得中間估計。在此基礎上,利用LLS估計量處理剩余測距誤差;文獻[15]也提出了類似方法,通過描述測距誤差,并引入確定性模型修正非視距條件下的測距誤差。然而,這兩種解決方案均建立在誤差測距統計模型基礎上,不將噪聲和接收功率視為潛在的有用信息[16-17]。本文從定位和導航模塊錨單元中提取各種參數,提出一種替代方法——模糊加權最小二乘估計(FWLSE)方法,旨在消除非視距環境的異常值。本文對視距和非視距環境中的測距誤差和參數行為進行分析。由于參數之間沒有一般的線性關系,因此提出一種基于模糊邏輯的算法,作為評估錨點測距數據的最佳機制,并選擇最佳錨點作為數據源,然后將其輸入定位引擎,以確保持續的高精度跟蹤。首先通過建模得到視距和非視距環境中的誤差,并確定不同相關參數的行為;然后利用模糊邏輯方法對接收到的數據進行后期處理,識別和消除測距數據中的異常值,并選擇最佳數據集用于定位計算;最后應用WLSE算法對移動目標進行定位。
1 室內跟蹤平臺概述
室內定位平臺基于超寬帶(UWB)技術,其組件包括:用于測距的預部署錨、跟蹤的移動標簽、用于數據管理和算法執行的服務器。
用于定位和導航的預部署錨模塊包括UWB錨(板)、Raspherry PI(PRI)和連接錨與RPI的接口印刷電路板(PCB)。
PI用于無線連接UWB錨與服務器,它們從UWB錨中檢索測距數據,并將其轉發到數據庫,以便WiFi定位。本文使用的錨由愛爾蘭廷德爾國家研究所(TNI)設計和開發,主要包括一個符合IEEE802.15.4-2011 UWB標準的單芯片、基于UWB技術(DWlOOO)的無線收發器/測距芯片組以及一個UWB天線,還有藍牙無線電、氣壓計和慣性測量單元(IMU)傳感器,可用于活動識別應用。這些組件超出了當前工作范圍[18-19]。
這些板也被用作移動標簽,通過UWB錨定進行跟蹤,然后將測距數據轉發給服務器,用于計算和算法執行。服務器存儲于數據庫,該數據庫由與范圍數據相關聯的靜態表和動態表組成。靜態表包括所有歷史測距數據及相關時間戳,可利用動態表檢索最新的測距數據,進行實時定位。本地化算法也托管在服務器上,該算法還用于計算定位坐標并將其顯示在圖形用戶界面(Graphical User Inter-face,GUI)上。
2誤差建模實驗
2.1實驗環境
利用上述平臺組件,進行視距和非視距測距測試。試驗在一個直徑為65.5 cm的混凝土柱房間內進行,該混凝土柱用于評估非視距情況下標簽的定位。將距離延伸至第二根柱,其厚度為70.5cm。在所有測試中,錨定在離柱子lOOcm的地方。同時,在標簽/錨之間沒有支柱的情況下進行LOS試驗。在視距和非視距實驗中,每進行一次測試,標簽均以50cm的增量移動。但是,由于試驗室場限制,最大距離為lOm。對于每個選定的距離(間隔50cin),在視距和非視距條件下進行300s的測距測試。電路板被編程為每秒采集一個樣本,然后對一些參數在不同距離上的行為進行評估。功率指表示第一道振幅值(FPA),距離指表示測距數據一錨點和移動節點之間的距離;噪聲指信道脈沖響應估計(CIRE)的標準偏差。20。。
2.2 LOS值計算
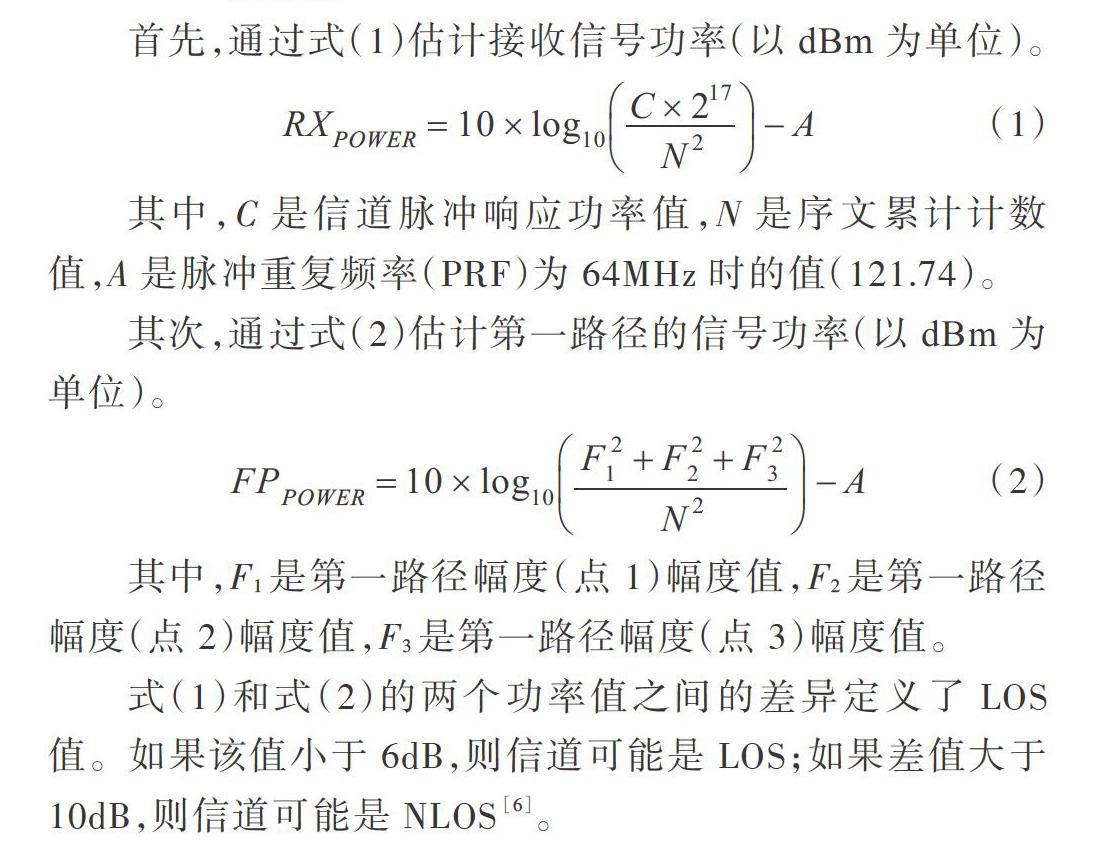
首先,通過式(1)估計接收信號功率(以dBm為單位)。
其中,C是信道脈沖響應功率值,Ⅳ是序文累計計數值,A是脈沖重復頻率(PRF)為64MHz時的值(121.74)。
其次,通過式(2)估計第一路徑的信號功率(以dBm為單位)。
其中,F1是第一路徑幅度(點1)幅度值,f2是第一路徑幅度(點2)幅度值,F3是第一路徑幅度(點3)幅度值。
式(1)和式(2)的兩個功率值之間的差異定義了LOS值。如果該值小于6dB,則信道可能是LOS;如果差值大于lOdB,則信道可能是NLOS[6]。
3模糊加權最小二乘估計算法
模糊加權最小二乘估計算法(FWISE)旨在處理來白錨點的接收測距數據,在對其執行定位算法之前仔細選擇具有低測距誤差的最佳測距數據。為了實現該目標,使用模糊邏輯方法進行誤差緩解,然后使用定位引擎(使用WLSE)講行定位。
3.1模糊邏輯方法
模糊邏輯方法靈活,易于設計,并且可為不確定的輸人數據提供輸[22],非常適合無法預測LOS/NLOS的環境。因此可通過改變系統中不同參數(功率、LOS、噪聲、距離)的隸屬函數及表1定義的規則調整模糊邏輯方法。本文模糊邏輯用于設置誤差概率作為每個接收讀數輸出(低、平均和高概率的誤差)對應的4元組(功率、LOS值、噪聲、距離)。輸入/輸出參數的隸屬函數由具有標準偏差的高斯函數定義,平均值從建模實驗中推斷而來。
錨和移動標簽之間的大距離與高噪聲相結合會增加出錯可能性。如圖1所示,此時最大距離已增加到15m,即被測房間的對角線。圖2顯示了距離、LOS值參數和誤差概率之間的相關性。通過圖2可看出具有低LOS值的短距離導致了不確定的錯誤概率。當LOS值高且距離大時.計算范圍誤差概率也會很高。 圖3展示了功率、LOS值和誤差概率之間的相關性。通過實驗發現,無論功率值如何,高LOS值均會產生很高的誤差概率。但是,規則和觀察并不適用于所有情況,因為元組之間沒有線性關系。因此,模糊邏輯是用于發現參數之間相關性的優秀方法,該方法將概率歸因于每個接收的讀取數據,調整系統后影響每個規則權重。模糊邏輯規則如表1所示。
模糊系統(P)輸出的質心方法如式(3)所示。
其中ui是具有隸屬度值ri的模糊值。
3.2定位引擎
該算法利用模糊邏輯對系統進行建模,處理錨點測距數據的不確定性。根據模糊規則計算所有錨每個測距數據的概率誤差。誤差概率有助于選擇更可靠的測距數據。當數據點超過3個時,所選數據將用于定位[11]。由于錨的數量和測試區域有限,將閾值設置為概率0.5,但是也可以動態設置該概率,例如,基于所有讀數概率的運行平均值。FWLSE算法流程如圖4所示。
位置坐標的計算通過加權最小二乘算法(WLSE)實現,WLSE可表示為:線性模型可表示為:
其中,
則WLSE坐標解算公式為:
WLSE坐標解算公式對應式(9)成本函數的最小化。
其中權重 β,計算公式為:
4 實驗結果與分析
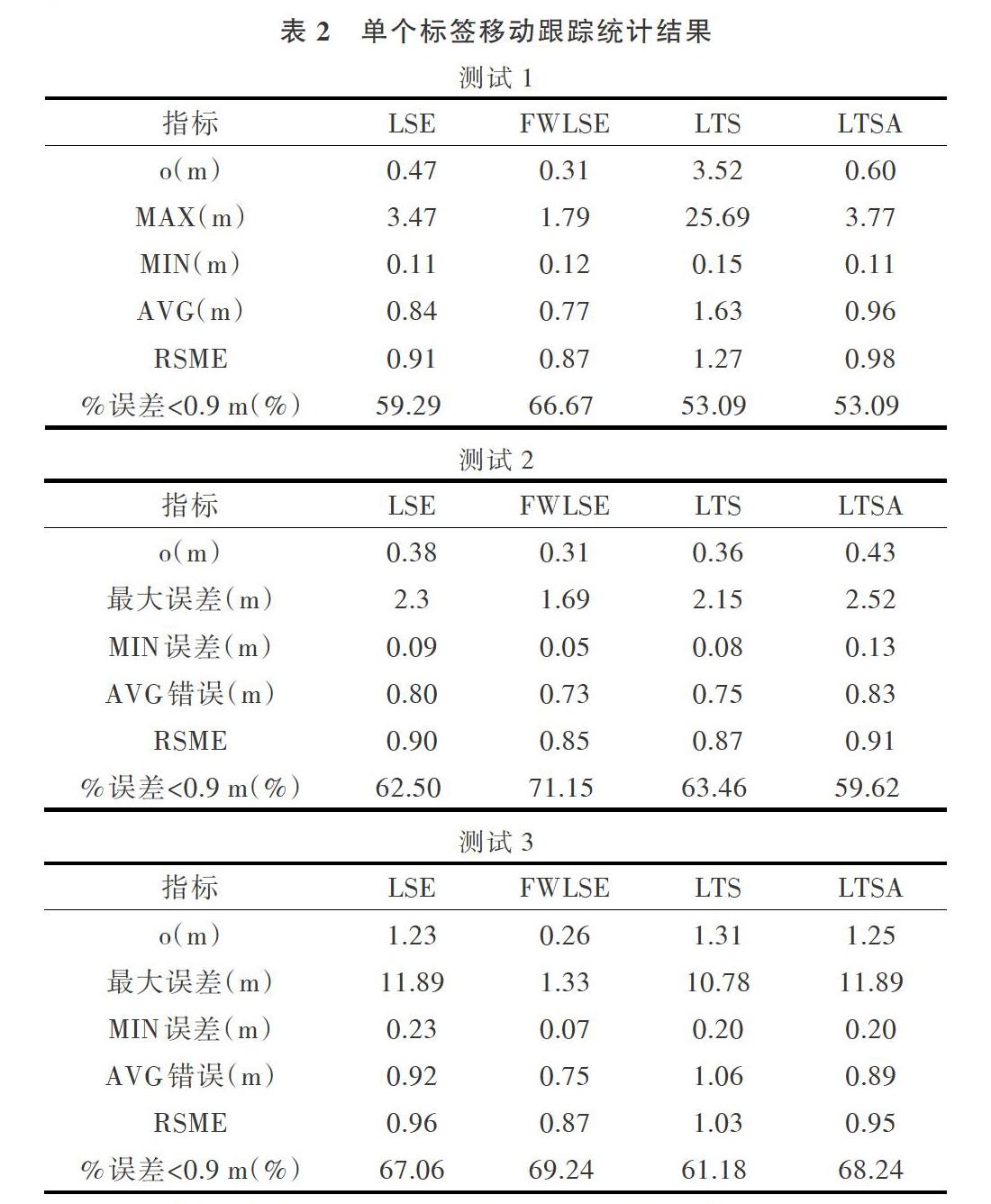
為評估本文算法性能,在上海工程技術大學實驗室進行測試。部署面積約為40m2,實驗室包含多個基礎設施障礙物,如支柱和桌椅等較小的物體,是一個典型的混亂環境。因此,實驗在NLOS情景下進行。測試使用具有已知位置的4個錨(AN)。這些錨部署在桌子或三腳架上,均具有預定位置(坐標),隨后將用于計算移動標簽的位置。這些單位的位置統一設置在跟蹤區域,其間距設定為約5.6m。為驗證算法有效性,將其與現有的3種算法進行比較。統計結果如表2所示,包括標準偏差(μ)、最大值(MAX)、最小值(MIN)和平均值誤差(AVG),所有值均以m作為單位。均方根誤差見表2。
將總誤差在90cm以下的百分比代人式(II)中計算均方根誤差值。
FLSE算法在計算定位坐標之前進行了預處理、測距數據選擇等改進,因此與其它3種算法(LSE、LST和LSTA)相比,在平均和最大誤差及最小誤差方面均表現更佳,如表2所示。此外,FWLSE算法實現了71.17%以上的小于90cm的總誤差(見表2測試2)。圖5-圖6分別展示了測試1-3跟蹤執行過程(彩圖掃描OSID碼可見,下同)。其中黑線描繪固定路徑(參考路徑),綠線描繪基于均勻速度計算的實驗實際路徑。藍線和紅線分別是用LSE和FLSE算法計算的路徑。從這些圖中可以觀察到一些異常值,例如測試1中對應位置(10.9,15.9)的異常值。這些是明顯的異常值,使用FWLSE方法計算定位時應被排除。表3展示了3次測試中FWLSE與LSE的改進情況,改進根據方程式(12)計算得來,其中AVGAVGWLSE分別是使用LSE和FWLSE算法獲得的平均誤差。從表3可以看出,與LSE算法相比,FWLSE算法改進比例高達18.28%。
對24種算法的累積分布函數(CDF)進行測試(見圖8)。從圖8可以看出,在90cin以下的誤差中,FWLSE達到71%,其中LSE分別占67.5%和63%,LTS和LTSA僅占62%.
同樣,對于1.2m以下的誤差,FWLSE改進比例為91%,而LTS、LTSA、LSE僅分別達到88%、82%、84%,本文算法提高了FWLSE精度。從表2可以看出,模糊算法平均誤差小于LTS、LTSA、LSE等3種算法的平均誤差。這主要是由于來白錨的測距數據被拒絕,而錨更有可能報告錯誤數據。最大誤差在FWLSE情況下通常較低,這表明該算法在進行定位計算之前,剔除異常值和誤差方面的性能更加優越。
5 結語
本文提出了一種基于UWB技術的室內定位NLOS錯誤緩解方法。該方法采用模糊邏輯方法的兩步算法和用于提高系統跟蹤精度的加權最小二乘估計算法。首先分析了測距數據,并進行過濾以消除異常值;然后將其送入定位引擎,從而提高系統整體定位精度。該算法已在一個步行場景進行測試,在該場景中標簽附著在人體上,在一個雜亂的環境中分別對視距和非視距環境進行測試。與現有算法相比,本文算法室內定位精度有所提高。未來研究將利用神經網絡跟蹤系統識別受試者正在執行的動作、跟蹤第一反應者等,其中位置跟蹤和對受試者當前身體活動的識別是一項重要研究任務。
參考文獻:
[1]方晨晨.基于UWB的自主跟隨機器人定位方法[J].軟件導刊,2016,15(9):127-129
[2]王婭.一種基于UWB的WSN節點定位技術[J]軟件導刊,2010,9(6):129-131
[3]盛利,段斌,鐘小鵬.基于UWB技術的無人機室內飛行測試平臺設計[J].傳感器與微系統,2019,38(6):79-82
[4]劉超,符世琛,成龍,等.基于超寬帶TSOA定位原理的掘進機定位誤差分析[J].煤炭工程,2019,51(6):133-135.
[5]FLATT H. KOCH N. ROCKER C, et al.A context aware assistancesvstem for maintenance applications in smart factories hased on aug-mented realitY and indoor localization[C]. IEEE 20th Conference onEmerging Technologies& Factorv Automation. 2015: 1-4.
[6]DARDARI D. CLOSAS P, DJURIC P M. Indoor tracking: theory,methods, and technologies[J] IEEE Transactions on Vehicular Tech-nology, 2015, 64(4): 1263-1278.
[7]GHENDIR S,SBAA S,AL-SHERBAZ A. et al. Tr,wards 5G Wirelesssvstems:a modified rake receirer for UWB indoor multipath channels[J]Physical Communication. 2019.35:1156-1198.
[8]胡瑜基于UWB通信的無線傳感網絡技術研究[D].哈爾濱:哈爾濱工業大學,2018
[9]Universitv of Science and Technology of China. Design of an interac-tive spatial augmented realitv system fnr stage performance based onUWB positioning and wireless triggering technolrigy[R].2019.
[10]GAO H K, LI X. Tightly-coupled ,Vehicle positioning method at inter-sections aided by UWB[J]. Sensors(Basel, Switzerland), 2019.19(13):944-949.
[11]YANC Y. ZHAO Y,KYAS M.A statistics-based least squares(SLS)method for non-line-of-sight error of indoor localizatinn[C].Wire-less Communications and Networking Conference, 2013: 2299-2304.
[12]胡海兵,張文達,鄭希鵬,等基于UWB的智能跟隨車導航定位算法研究[J].電子技術應用,2019,45(3):80-83,87.
[13] 梁豐,熊凌.基于GA-BP神經網絡的移動機器人UWB室內定位[J].微電子學與計算機,2019. 36( 4):33-37 .42.
[14]王勇,張新景,史穎剛.UWB/陀螺儀組合的溫室噴藥機器人導航系統設計[j]信息技術與信息化,2019(6):60-62
[15]李國友,宋成全,孟巖.基于超寬帶室內定位聯合算法的研究[J].電子技術應用,2019.45(7):93-96,101.
[16]ALBAIDHANI A,MORELL A. VICARIO J L.Anchor selection forUWB indoor positioning[J]. Transactions on Emerging Telecommu-nications Technologies, 2019.30(6): 168-178
[17]RETSCHER G,GIKAS V, HOFER H. et al. Range validation ofUWB and Wi-Fi for integrated indoor positioning[J]. Applied Ceo-matics.2019. 11(2): 187-195
[18]XIN L.YAN W,KHOSHELHAM K. Comparative anal、sis of rohustextended Kalman filter and incremental smoothing for LWB/PDR fu-sion positioning in NLOS environmentsFJl. Acta Geodaetica et Ceo-physica, 2019, 54(2): 157-179.
[19]董云峰,劉強.基于UWB的化工廠人員定位系統設計[J].智能物聯技術.2019, 51(3):42-48.
[20]羅晴明基于北斗/LWB的高精度室內外定位系統及其定位方法[J].電子世界,2019(7):184-185
[21]梁豐,熊凌.基于CA-BP神經網絡的移動機器人UWB室內定位 [J].微電子學與計算機,2019.36(4):33-37.42.
[22]姜春生,廖穎慧,蔡博基于UWB的物流倉儲自動導引車的定位系統研究[J].計算機時代,2019(5):5-8
(責任編輯:江艷)
收稿日期:2019-07-25
基金項目:國家自然科學基金項目(61272097);上海市科技學術委員會重點項目(18511101600)
作者簡介:張峻豪(1995-),男,上海工程技術大學電子電氣工程學院碩士研究生,研究方向為無線定位;朱海(1992-),男,博士,上海
工程技術大學講師,研究方向為無限感知、室內定位;韓寶磊(1995-),男,上海工程技術大學電子電氣工程學院碩士研究
生,研究方向為室內定位。