三維空間機(jī)器人主動(dòng)嗅覺(jué)煙羽源自主定位策略
2020-06-18 05:56:26黃建新
計(jì)算機(jī)工程與應(yīng)用 2020年12期
黃建新,袁 杰
新疆大學(xué) 電氣工程學(xué)院,烏魯木齊830047
1 引言
大氣中一些有害氣體通過(guò)煙羽擴(kuò)散方式,對(duì)環(huán)境和健康造成危害。煙羽是指從煙羽源釋放的分子團(tuán)被空氣流吹散后,像羽毛一樣在空氣介質(zhì)中擴(kuò)散,形成的軌跡[1]。若能定位到有害氣體煙羽源,便于及時(shí)預(yù)警和救援。煙羽源定位分為三個(gè)過(guò)程,即煙羽發(fā)現(xiàn)、煙羽追蹤、煙羽源定位。本文研究的是在已知煙羽發(fā)現(xiàn)的情況下,機(jī)器人如何自主追蹤煙羽,直至定位到煙羽源附近。基于仿生行為的機(jī)器人主動(dòng)嗅覺(jué)在這方面有突出優(yōu)勢(shì),眾多學(xué)者對(duì)煙羽源定位問(wèn)題進(jìn)行了研究,提出了相應(yīng)的方法。王儉等[2-4]采用變步長(zhǎng)六邊形算法定位煙羽源。田宇等人[5]針對(duì)深海熱源探測(cè)、定位效率低下的問(wèn)題,設(shè)計(jì)出了自主水下深海熱源定位仿真環(huán)境。魏傳鋒等人[6]針對(duì)三維密閉空間突發(fā)持續(xù)污染源定位問(wèn)題,提出了一種基于位置多假設(shè)的污染源定位方法。余瀟瀟等人[7]針對(duì)傳統(tǒng)的設(shè)置固定監(jiān)測(cè)站進(jìn)行污染源監(jiān)測(cè)問(wèn)題,提出了一種基于移動(dòng)車載傳感器網(wǎng)絡(luò)的空間污染源定位算法。王陽(yáng)等[8]針對(duì)室內(nèi)通風(fēng)環(huán)境下煙羽源定位問(wèn)題,提出了一種基于模擬退火算法的單機(jī)器人煙羽源定位方法。張建化等[9]針對(duì)機(jī)器人通信受限問(wèn)題,提出了一種基于微粒群優(yōu)化的有限通信多機(jī)器人煙羽源定位方法。張思齊等[10]針對(duì)湍流環(huán)境中機(jī)器人空間感知能力不足問(wèn)題,提出一種多弱感知機(jī)器人煙羽源搜索算法。陳一村等人[11],針對(duì)室內(nèi)時(shí)變污染源定位問(wèn)題,采用粒子群智能搜索算法定位室內(nèi)時(shí)變污染源。宋程等[12]針對(duì)共享源概率地圖方法不足問(wèn)題,提出了一種基于認(rèn)知差異的多機(jī)器人協(xié)同信息趨向煙羽源搜索方法。Jatmiko等人[13]將粒子群優(yōu)化算法用于群體機(jī)器人煙羽源定位。Ghods等[14]采用極值搜索方法定位煙羽源。
以上學(xué)者提出的方法雖然能夠定位到煙羽源,但根據(jù)作者掌握的國(guó)內(nèi)外資料,目前鮮有人研究三維空間下煙羽源自主定位問(wèn)題。因此,本文提出了布谷鳥(niǎo)搜索算法結(jié)合改進(jìn)的模糊C均值聚類算法的自主定位策略。采用布谷鳥(niǎo)搜索算法生成機(jī)器人搜索的位置信息,避免搜索盲目性;將該位置信息及該位置處對(duì)應(yīng)的煙羽濃度構(gòu)成四維特征向量,采用改進(jìn)的模糊C均值算法對(duì)該組特征向量和歷史特征向量構(gòu)成的一組性的特征向量聚類分析,獲取濃度最大類對(duì)應(yīng)的三維坐標(biāo),便于構(gòu)建布谷鳥(niǎo)搜索算法的目標(biāo)函數(shù),為布谷鳥(niǎo)算法搜索提供了搜索范圍。
2 布谷鳥(niǎo)搜索算法
布谷鳥(niǎo)算法(Cuckoo Search,CS)是由英國(guó)學(xué)者Yang Xinshe和Suash Deb于2009年在群體智能技術(shù)的基礎(chǔ)上提出的一種新型基于自然元啟發(fā)式算法。對(duì)于布谷鳥(niǎo)搜索算法,理想情況下假設(shè)如下3條規(guī)則:
(1)每只布谷鳥(niǎo)每次隨機(jī)選擇一個(gè)其他鳥(niǎo)類的巢穴,并且每次只產(chǎn)一個(gè)蛋,放入選中的巢穴中。
(2)具有最高質(zhì)量鳥(niǎo)蛋的巢穴會(huì)被保留至下一代。
(3)可用的寄主巢穴數(shù)量是固定的,并且寄主按概率pa∈(0,1)發(fā)現(xiàn)布谷鳥(niǎo)放的蛋。在這種情況下,寄主鳥(niǎo)類可以破壞該蛋或者放棄該巢穴,選擇重新建立新的巢穴。
該算法采用局部隨機(jī)游走和全局探索隨機(jī)游走,局部隨機(jī)游走滿足方程式(1):

另一方面,全局隨機(jī)搜索采用Lévy飛行,滿足方程(2):

方程(2)中的α>0,是步長(zhǎng)縮放因子,其中,L( s,λ)表達(dá)式為:

用Lévy飛行生成隨機(jī)數(shù)應(yīng)包括兩個(gè)步驟:隨機(jī)方向的選擇和服從Lévy分布的步長(zhǎng)生成。方向的隨機(jī)選擇應(yīng)服從均勻分布,而Lévy分布的步長(zhǎng)生成則采用Mantegna算法來(lái)實(shí)現(xiàn)。在Mantegna算法中,步長(zhǎng)s可以通過(guò)使用兩個(gè)服從高斯分布的變量U和V計(jì)算,如方程(4):

其中,U~N( 0,σ2),V~N( 0,1),這里的U~N( 0,σ2)意味著樣本服從均值為0,方差為σ2的高斯正態(tài)分布,方差σ2滿足方程(5):

布谷鳥(niǎo)搜索算法步驟如下:
步驟1設(shè)置巢穴個(gè)數(shù)為n,搜索空間維度為d,初始化巢穴位置,將P0代入目標(biāo)函數(shù),求出最優(yōu)巢穴的位置
步驟2循環(huán)體
巢穴位置更新:保留上代最優(yōu)巢穴位置xt-1b,t為整數(shù),并且利用公式(2)對(duì)其他巢穴位置進(jìn)行更新,得到一組新的巢穴位置解,將這組新解代入目標(biāo)函數(shù),與上代巢穴位置得到的適應(yīng)度值進(jìn)行對(duì)比,用適應(yīng)度值較好的巢穴位置替換適應(yīng)度值較差的巢穴位置,從而能夠得到一組優(yōu)于上代的巢穴位置
存安去險(xiǎn):用服從均勻分布的隨機(jī)數(shù)ε∈[0,1]作為巢穴主人發(fā)現(xiàn)外來(lái)鳥(niǎo)蛋的可能性,并且與設(shè)定值pa進(jìn)行比較,通過(guò)方程(1)得到一組新巢穴位置Kt=,計(jì)算新巢穴位置對(duì)應(yīng)的適應(yīng)度值,與得到的適應(yīng)度值進(jìn)行比較,用適應(yīng)度值較好的巢穴位置替換適應(yīng)度值較差的巢穴位置,從而能夠得到一組優(yōu)于上代的巢穴位置
步驟3判斷是否滿足迭代終止條件若達(dá)到迭代條件終止條件,若滿足輸出最優(yōu)一組巢穴Pt,反之,返回步驟2循環(huán)體繼續(xù)進(jìn)行迭代更新。
布谷鳥(niǎo)搜索算法流程圖如圖1所示。
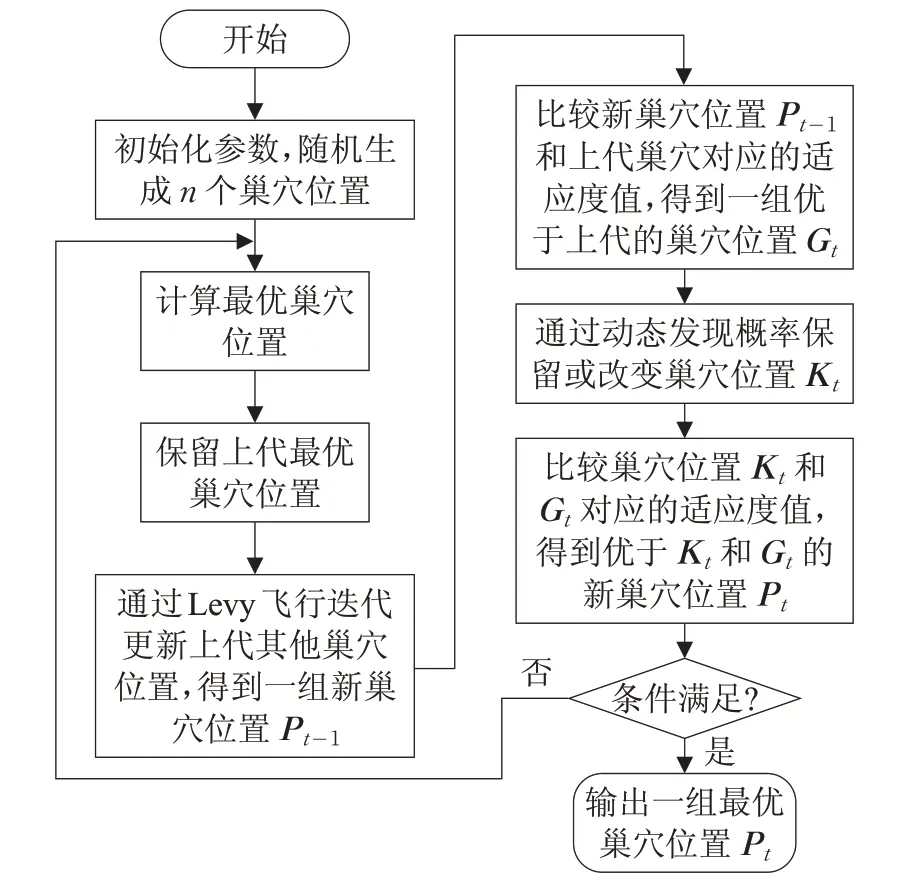
圖1 布谷鳥(niǎo)搜索算法流程圖
3 模糊C均值聚類算法
Bezdek[15]提出了模糊C均值(Fuzzy C-Means)算法,簡(jiǎn)稱FCM算法。該算法通過(guò)計(jì)算每個(gè)樣本屬于所有類的隸屬度,比較每個(gè)樣本屬于各個(gè)類的隸屬度大小,確定每個(gè)樣本所屬類別。
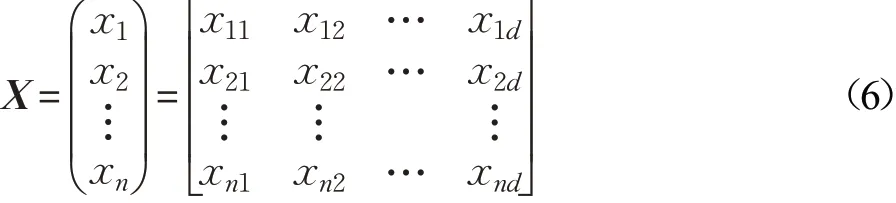
設(shè)樣本X={x1,x2,…,xn-1,xn},其中每個(gè)樣本xk均有d個(gè)特征,其特征矩陣為:
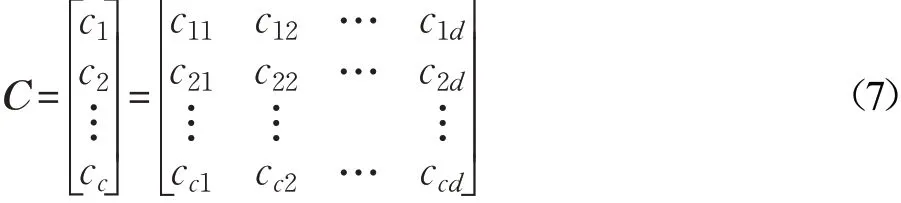
將樣本X分成c類(2≤c≤n),設(shè)c個(gè)聚類中心向量為:
設(shè)uij∈[0,1]表示第j個(gè)樣本屬于第i類的隸屬度,且滿足:

模糊劃分的隸屬度矩陣U為:
FCM算法目標(biāo)函數(shù)J為:

約束條件為:

利用拉格朗日乘子法將約束問(wèn)題轉(zhuǎn)化成無(wú)約束問(wèn)題,即目標(biāo)函數(shù)J轉(zhuǎn)化為:
將式(13)中所有元素求和,計(jì)算目標(biāo)函數(shù)J,分別對(duì)其中uij、ci求導(dǎo),令導(dǎo)數(shù)為零,計(jì)算目標(biāo)函數(shù)J的極小值,求出uij、ci如下:
FCM算法步驟:
步驟1確定FCM算法聚類數(shù)目Cluster,加權(quán)指數(shù)m。
步驟2初始化隸屬度矩陣U。
步驟3根據(jù)式(15)計(jì)算聚類中心C。
步驟4根據(jù)式(12)計(jì)算目標(biāo)函數(shù)J。
步驟5根據(jù)步驟3求得的C和式(14)計(jì)算U。
步驟6判斷是否滿足迭代次數(shù),若不滿足,返回步驟3,否則,算法終止,返回聚類結(jié)果。
4 改進(jìn)的模糊C均值聚類算法
因傳統(tǒng)的模糊C均值聚類算法中n個(gè)聚類樣本X={x1,x2,…,xn-1,xn}的聚類中心點(diǎn)初始值是隨機(jī)選取的,聚類中心初始值的選取嚴(yán)重影響聚類效果,在本論文中,通過(guò)構(gòu)造密度指標(biāo)函數(shù)對(duì)該算法改進(jìn),確定聚類中心的初始值。構(gòu)造的密度指標(biāo)函數(shù)如方程(16):

其中,ra是定義的樣本的鄰域半徑,半徑以外的樣本點(diǎn)對(duì)該樣本點(diǎn)的影響甚小,為了較好確定聚類中心初始值,不至于跨度太大,設(shè)定ra=0.5。
具體實(shí)現(xiàn)步驟如下:
步驟1根據(jù)方程(16)計(jì)算樣本X中每個(gè)樣本點(diǎn)的密度指標(biāo)值,密度指標(biāo)值越大,則該樣本點(diǎn)周圍的點(diǎn)越多,以密度指標(biāo)值最大的樣本點(diǎn)作為聚類中心點(diǎn)的一個(gè)初始值。
步驟2設(shè)xck為第k次計(jì)算的聚類中心初始值,相應(yīng)的密度指標(biāo)為Dck,對(duì)于其他每個(gè)樣本點(diǎn)xk(xk≠xck)的密度指標(biāo)按方程(17)進(jìn)行修正。

其中,rb定了一個(gè)密度指標(biāo)函數(shù)顯著減小的領(lǐng)域,領(lǐng)域中靠近第k個(gè)聚類中心初值樣本點(diǎn)的密度指標(biāo)顯著減小,這些樣本點(diǎn)成為下一個(gè)聚類中心的可能小甚微。為了避免出現(xiàn)距離很近的聚類中心點(diǎn),一般取rb=(1 .2~1.5) ra,本文取rb=0.6。
步驟3根據(jù)FCM算法確定的聚類數(shù)目,判斷計(jì)算的聚類中心初始值個(gè)數(shù)是否等于聚類數(shù)目,若滿足,則計(jì)算終止,否則,返回步驟2。
5 煙羽源定位策略實(shí)驗(yàn)驗(yàn)證及分析
5.1 污染源模擬與空間坐標(biāo)系建立
為了采集煙羽濃度信息及濃度信息對(duì)應(yīng)的空間坐標(biāo),把加入乙醇的加濕器模擬為污染源,在實(shí)驗(yàn)室建立三維空間坐標(biāo)系,見(jiàn)圖2。
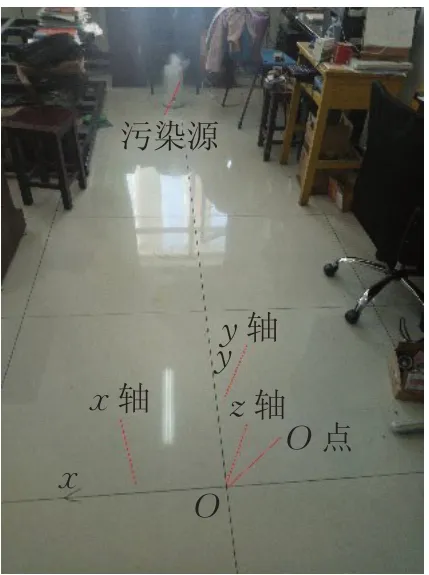
圖2 實(shí)驗(yàn)室模擬污染源及空間坐標(biāo)系
圖2 中,以加滿乙醇的加濕器作為污染源,放在實(shí)驗(yàn)室固定位置,距離污染源約4 m的地方建立了如圖所示的空間坐標(biāo)系,圖中的O點(diǎn)即為x軸、y軸和z軸的交點(diǎn)。完成污染源模擬和坐標(biāo)系建立后,采用Arduino控制器、兩個(gè)MQ-3濃度傳感器、筆記本電腦、Kobuki移動(dòng)機(jī)器人、卷尺對(duì)實(shí)驗(yàn)室空間煙羽濃度分布進(jìn)行采集,直至采集到模擬的污染源附近為止,實(shí)驗(yàn)平臺(tái)如圖3所示。

圖3 實(shí)驗(yàn)平臺(tái)
采集的部分?jǐn)?shù)據(jù)如表1所示。
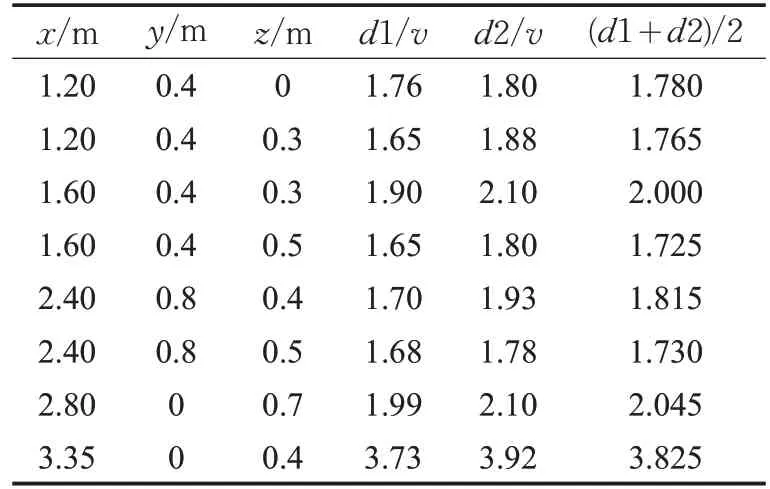
表1 采集的部分?jǐn)?shù)據(jù)
5.2 FCM算法參數(shù)確定
FCM算法中需要確定兩個(gè)參數(shù),即聚類數(shù)目Cluster和加權(quán)指數(shù)m。采用兩種評(píng)價(jià)指標(biāo),即Xie-Beni評(píng)價(jià)指標(biāo)和緊致性度量指標(biāo)Com(Cluster),通過(guò)實(shí)驗(yàn)確定聚類數(shù)目Cluster和加權(quán)指數(shù)m。Xie-Beni評(píng)價(jià)指標(biāo)通過(guò)尋找類內(nèi)緊湊度和類間分離度之間的平衡點(diǎn),來(lái)衡量聚類效果,如方程(18):
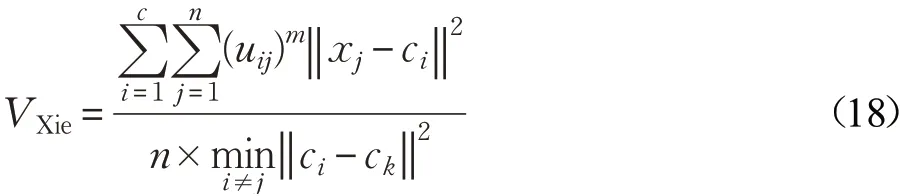
其中,c是聚類數(shù)目,n是樣本數(shù)目,m是FCM算法中加權(quán)指數(shù)參數(shù)。uij表示第j個(gè)樣本屬于第i類的隸屬度,ci是某一類聚類中心,ck也是某一類聚類中心,Xie-Beni指標(biāo)越小,聚類效果越好。緊致性度量是評(píng)價(jià)類內(nèi)的內(nèi)聚程度,如式(19)所示:
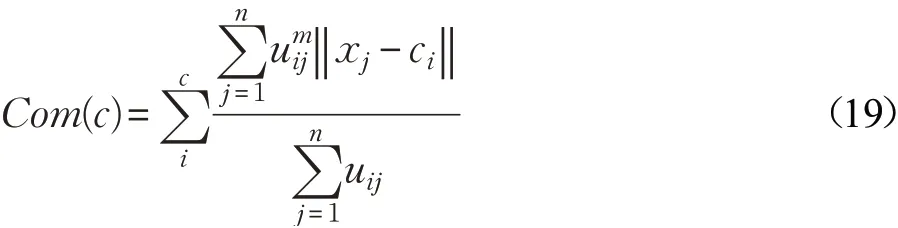
其中,c是聚類數(shù)目,n是樣本數(shù)目,m是FCM算法加權(quán)指數(shù)參數(shù),uij表示第j個(gè)樣本屬于第i類的隸屬度,ci是某一類聚類中心,ck也是某一類聚類中心,Com(c)值越小,聚類效果越好。
Bezdek[15]指出FCM算法中加權(quán)指數(shù)m理想范圍為[1.6,2.6]。故依次取加權(quán)指數(shù)m為1.6、1.8、2.0、2.2、2.4、2.6。在Matlab2017a軟件平臺(tái)上,針對(duì)m不同取值,分別將實(shí)驗(yàn)室采集的380個(gè)由x、y、z坐標(biāo)和有害氣體濃度構(gòu)成的四維數(shù)據(jù)聚成2~16類,以此確定FCM算法聚類數(shù)目和加權(quán)指數(shù)。實(shí)驗(yàn)效果如圖4~圖6。
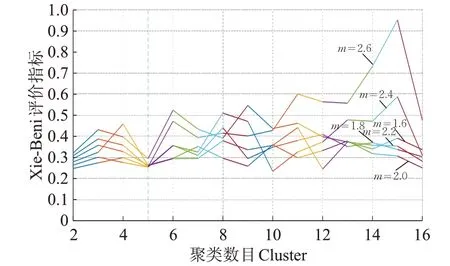
圖4 Xie-Beni指標(biāo)與聚類數(shù)目關(guān)系曲線
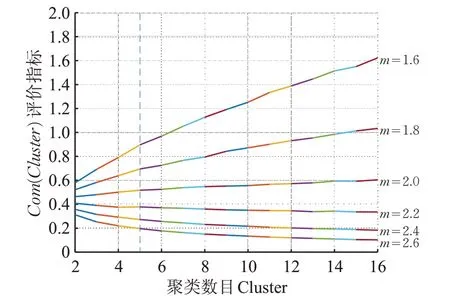
圖5 Com(Cluster)指標(biāo)與聚類數(shù)目關(guān)系曲線
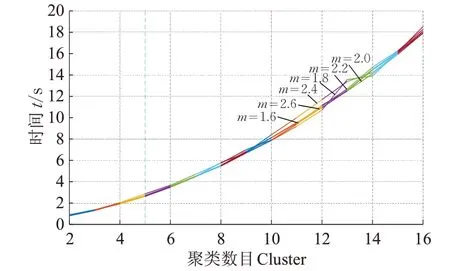
圖6 仿真時(shí)間與聚類數(shù)目關(guān)系曲線
圖4 是Xie-Beni評(píng)價(jià)指標(biāo)與聚類數(shù)目關(guān)系曲線圖,圖中六條曲線分別是加權(quán)指數(shù)m取1.6、1.8、2.0、2.2、2.4、2.6時(shí)對(duì)應(yīng)的曲線。由圖4知,隨著m取值及聚類數(shù)目的變化,Xie-Beni評(píng)價(jià)指標(biāo)也隨著變化,且每條曲線在聚類數(shù)目為5時(shí),都取得極小值,且所取得的極小值僅比聚類數(shù)目10和12時(shí)取得極小值稍大。圖5是Com(Cluster)評(píng)價(jià)指標(biāo)與聚類數(shù)目關(guān)系曲線圖,圖中六條曲線分別是加權(quán)指數(shù)m取1.6、1.8、2.0、2.2、2.4、2.6時(shí)對(duì)應(yīng)的曲線。對(duì)比圖5六條曲線可知,隨著加權(quán)指數(shù)m取值增加,Com(Cluster)評(píng)價(jià)指標(biāo)逐漸減小,故m取值越大,Com(Cluster)評(píng)價(jià)指標(biāo)越小。圖6是仿真時(shí)間與聚類數(shù)目關(guān)系曲線圖,圖中六條曲線分別是加權(quán)指數(shù)m取1.6、1.8、2.0、2.2、2.4、2.6時(shí)對(duì)應(yīng)的曲線。由圖6知,不論m取值如何,隨著聚類數(shù)目增加,運(yùn)行時(shí)間一直增加。對(duì)比圖4~圖6可知,圖4中,盡管聚類數(shù)目為10和12時(shí)取得極小值比聚類數(shù)目為5時(shí)取得的極小值稍小,但在圖5中對(duì)應(yīng)的時(shí)間比聚類數(shù)目為5時(shí)所用時(shí)間長(zhǎng)很多,故聚類數(shù)目取5時(shí),較為合適。綜上分析,本論文聚類數(shù)目取5,加權(quán)指數(shù)m取2.6。
5.3 自主定位策略效果分析
5.3.1 自主定位策略
布谷鳥(niǎo)搜索算法結(jié)合改進(jìn)的模糊C均值聚類算法的自主定位策略包括七個(gè)部分,即:模擬煙羽發(fā)現(xiàn),采用改進(jìn)的FCM聚類算法對(duì)四維特征向量聚類,構(gòu)造目標(biāo)函數(shù),采用布谷鳥(niǎo)搜索算法迭代生成三維路徑點(diǎn),計(jì)算三維路徑點(diǎn)對(duì)應(yīng)的等效濃度,利用歷史四維特征向量數(shù)據(jù)和當(dāng)前迭代的四維特征向量數(shù)據(jù)構(gòu)造新的四維特征向量數(shù)據(jù),以及反復(fù)交替采用布谷鳥(niǎo)搜索算法和改進(jìn)的FCM聚類算法。
模擬煙羽發(fā)現(xiàn):任取實(shí)際采集的由x、y、z和該位置處的煙羽濃度構(gòu)成的380個(gè)四維特征向量中的50個(gè)作為初始點(diǎn),這些初始點(diǎn)即作為煙羽發(fā)現(xiàn)的數(shù)據(jù)點(diǎn)。
采用改進(jìn)的FCM聚類算法對(duì)四維特征向量聚類:采用改進(jìn)的FCM聚類算法對(duì)四維特征向量數(shù)據(jù)聚類分析。
構(gòu)造目標(biāo)函數(shù):根據(jù)改進(jìn)的FCM聚類算法的聚類結(jié)果,獲取濃度最大類對(duì)應(yīng)的三維坐標(biāo)及其對(duì)應(yīng)的濃度,如圖7中的“●”所示,分別求取濃度最大類中所有四維特征向量的三維坐標(biāo)x、y、z的平均值,作為布谷鳥(niǎo)搜索算法的初始值,以“●”作為參照點(diǎn),計(jì)算布谷鳥(niǎo)搜索算法生成的三維路徑點(diǎn)和該參照點(diǎn)的距離平方和,作為目標(biāo)函數(shù)。根據(jù)目標(biāo)函數(shù),以“●”為參照點(diǎn),采用布谷鳥(niǎo)搜索算法迭代生成四軸飛行器下一步要搜索的空間區(qū)域,如圖7中“×”所示。
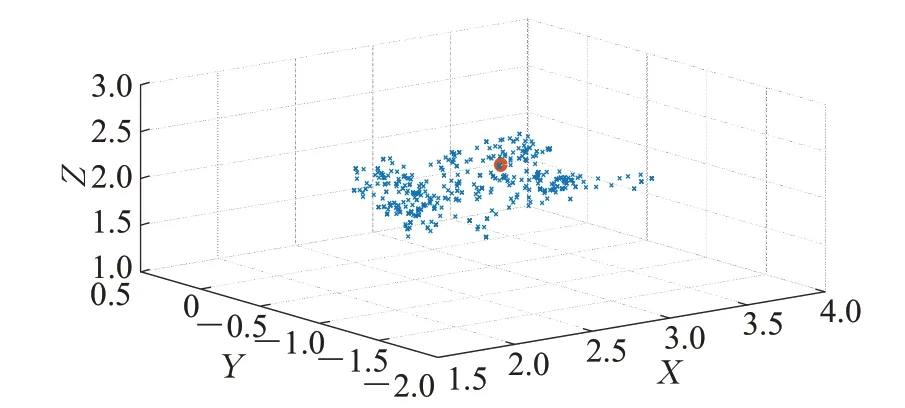
圖7 聚類后濃度最大點(diǎn)和布谷鳥(niǎo)搜索算法迭代的路徑點(diǎn)
采用布谷鳥(niǎo)搜索算法迭代生成三維路徑點(diǎn):根據(jù)構(gòu)造的目標(biāo)函數(shù),采用布谷鳥(niǎo)搜索算法迭代生成三維路徑點(diǎn)。
計(jì)算三維路徑點(diǎn)對(duì)應(yīng)的等效濃度:計(jì)算布谷鳥(niǎo)搜索算法迭代生成的每個(gè)路徑點(diǎn)與如圖8所示的實(shí)際采集的380個(gè)三維坐標(biāo)數(shù)據(jù)點(diǎn)的距離,以最近的距離對(duì)應(yīng)的實(shí)際采集的濃度作為布谷鳥(niǎo)搜索算法迭代生成的三維路徑點(diǎn)的等效濃度。
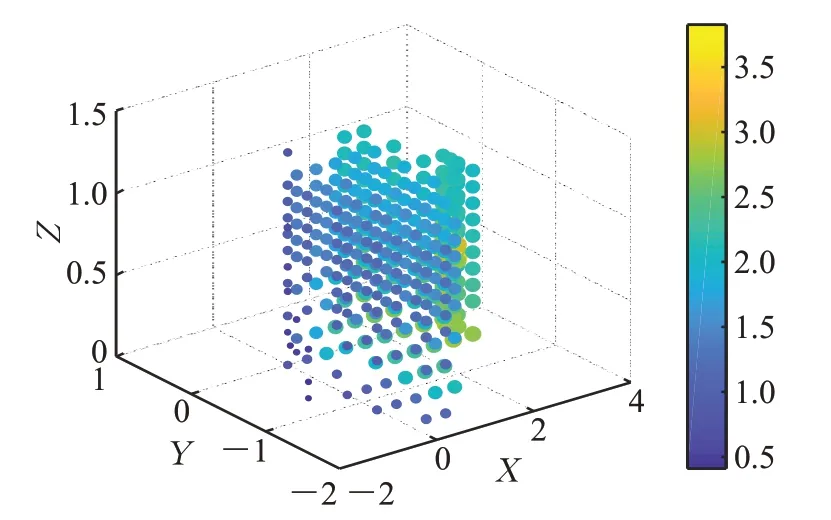
圖8 真實(shí)采集的三維數(shù)據(jù)及對(duì)應(yīng)濃度散點(diǎn)圖
利用歷史四維特征向量數(shù)據(jù)和當(dāng)前迭代的四維特征向量數(shù)據(jù)構(gòu)造新的四維特征向量數(shù)據(jù):利用歷史數(shù)據(jù)指的是將前幾次迭代和當(dāng)前布谷鳥(niǎo)搜索算法迭代生成的三維路徑點(diǎn)和對(duì)應(yīng)的等效濃度構(gòu)成一組新的四維特征向量,為改進(jìn)的FCM聚類算法提供了聚類數(shù)據(jù)。
反復(fù)交替采用布谷鳥(niǎo)搜索算法和改進(jìn)的FCM聚類算法:再次采用改進(jìn)的FCM聚類算法對(duì)采用歷史數(shù)據(jù)機(jī)制構(gòu)成的新的一組四維特征向量聚類,再次根據(jù)濃度最大值,構(gòu)造目標(biāo)函數(shù),采用布谷鳥(niǎo)搜索算法迭代生成新的路徑點(diǎn)。反復(fù)采用布谷鳥(niǎo)搜索算法結(jié)合改進(jìn)的FCM聚類算法,直到定位到煙羽源附近為止,實(shí)現(xiàn)了定位的自主性,布谷鳥(niǎo)搜索算法結(jié)合改進(jìn)的FCM聚類算法自主定位策略流程圖如圖9所示。
5.3.2 實(shí)驗(yàn)效果分析
利用該方法在Matlab中的運(yùn)行結(jié)果如圖10~圖16所示。
圖8是根據(jù)實(shí)驗(yàn)室實(shí)際采集的380個(gè)三維坐標(biāo)數(shù)據(jù)及對(duì)應(yīng)濃度畫(huà)出的散點(diǎn)圖,右側(cè)的柱狀顏色條代表實(shí)際采集的濃度信息,隨著顏色的不同,濃度值也不同。因?qū)嶒?yàn)室模擬的污染源實(shí)際對(duì)應(yīng)的濃度范圍為:[0.41,3.825],該范圍與柱狀條顏色一一對(duì)應(yīng)。圖10是根據(jù)實(shí)際采集的380個(gè)數(shù)據(jù)點(diǎn)中前50個(gè)三維坐標(biāo)數(shù)據(jù)及其對(duì)應(yīng)的濃度,畫(huà)出的散點(diǎn)圖,從圖中可以看出,該50個(gè)數(shù)據(jù)點(diǎn)對(duì)應(yīng)的濃度大致范圍在[0.5,1.2]。對(duì)比圖10~圖16可知,僅僅采用已知的50個(gè)實(shí)驗(yàn)室采集的濃度數(shù)據(jù)作為煙羽發(fā)現(xiàn),反復(fù)交替使用改進(jìn)的模糊C均值算法及布谷鳥(niǎo)搜索算法,后一次迭代總能比前一次迭代獲取的煙羽濃度范圍大,通過(guò)6次迭代,最終能夠自主定位到煙羽源附近。圖16對(duì)應(yīng)的煙羽濃度范圍為[2.2,3.8],該范圍是圖8實(shí)驗(yàn)室采集的煙羽濃范圍[0.41,3.825]的子集,且最大濃度很接近,驗(yàn)證了該定位策略的有效性。為進(jìn)一步驗(yàn)證該策略的有效性,做了5次實(shí)驗(yàn),結(jié)果見(jiàn)圖17及表2。
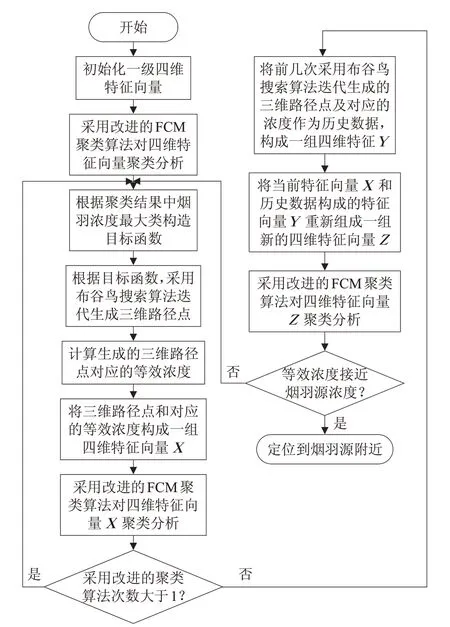
圖9 布谷鳥(niǎo)搜索算法結(jié)合FCM聚類算法自主定位策略流程圖
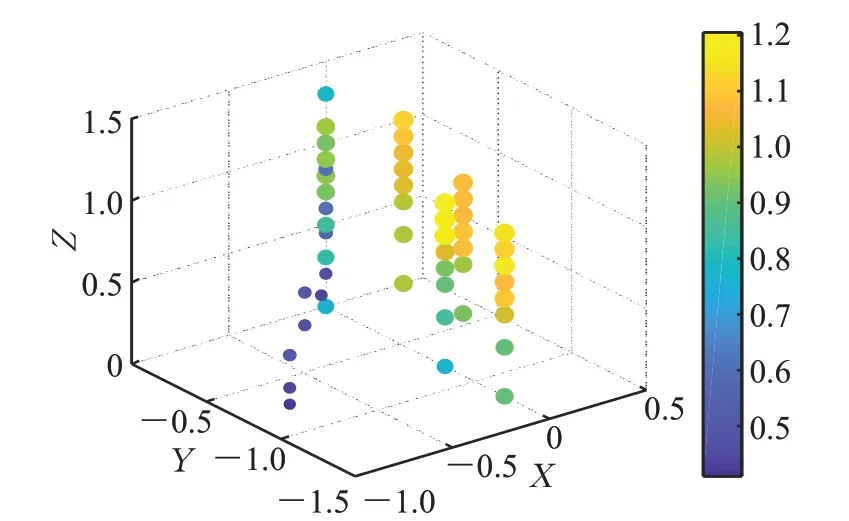
圖10 真實(shí)采集的數(shù)據(jù)點(diǎn)前50個(gè)數(shù)據(jù)對(duì)應(yīng)的散點(diǎn)圖
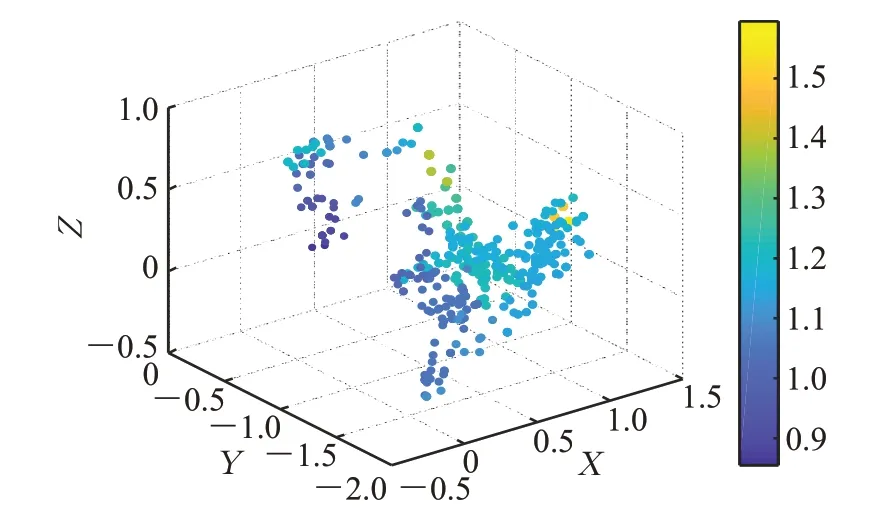
圖11 第一次迭代產(chǎn)生的坐標(biāo)及等效濃度散點(diǎn)圖
其中收斂精度是指在每次實(shí)驗(yàn)中,最大等效濃度所對(duì)應(yīng)的三維坐標(biāo)與實(shí)驗(yàn)室實(shí)際采集的煙羽最大濃度所對(duì)應(yīng)的三維坐標(biāo)的平方和,平方和越小,越能說(shuō)明收斂到煙羽源附近;收斂時(shí)間是指每次實(shí)驗(yàn)總共所用時(shí)間。
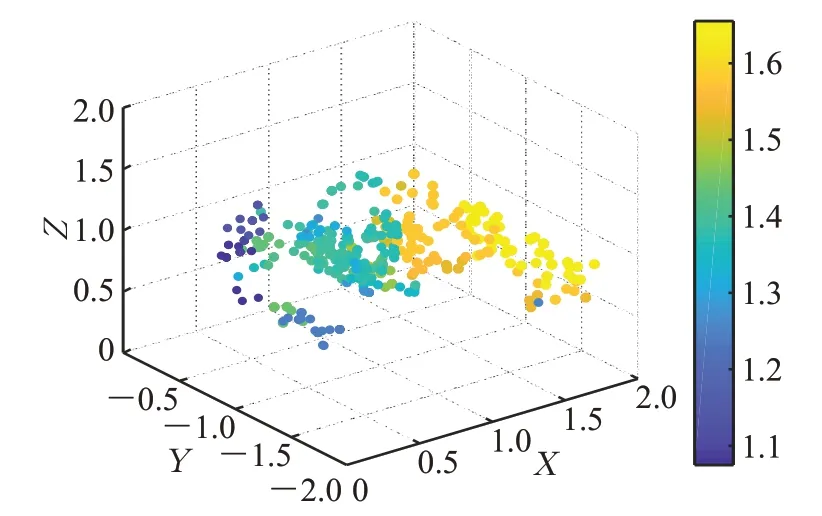
圖12 第二次迭代產(chǎn)生的坐標(biāo)及等效濃度散點(diǎn)圖
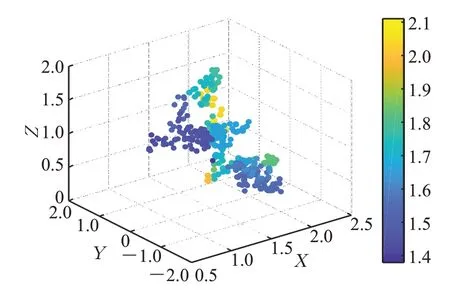
圖13 第三次迭代產(chǎn)生的坐標(biāo)及等效濃度散點(diǎn)圖
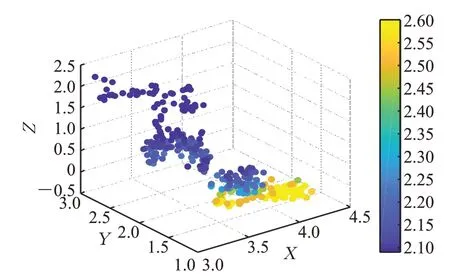
圖14 第四次迭代產(chǎn)生的坐標(biāo)及等效濃度散點(diǎn)圖
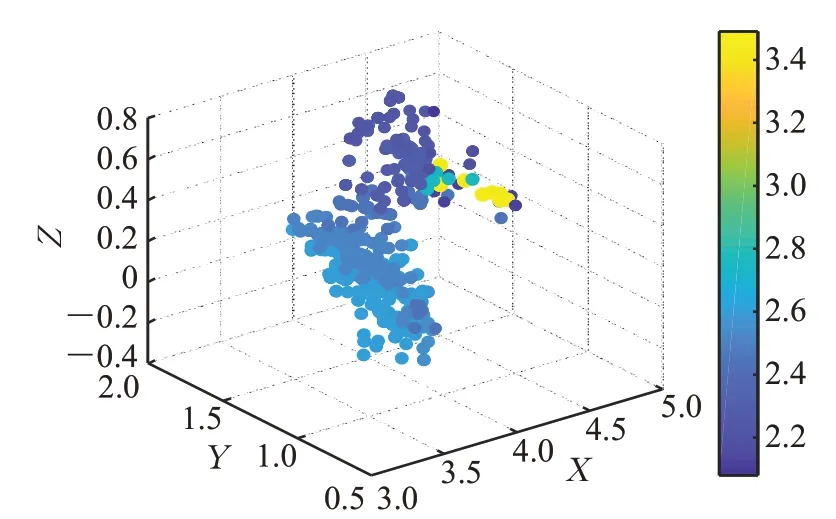
圖15 第五次迭代產(chǎn)生的坐標(biāo)及等效濃度散點(diǎn)圖
由表2及圖17知,每次實(shí)驗(yàn)最大濃度所在位置都比較接近實(shí)際的煙羽最大濃度所在位置,進(jìn)一步驗(yàn)證了該策略的可行性及有效性。
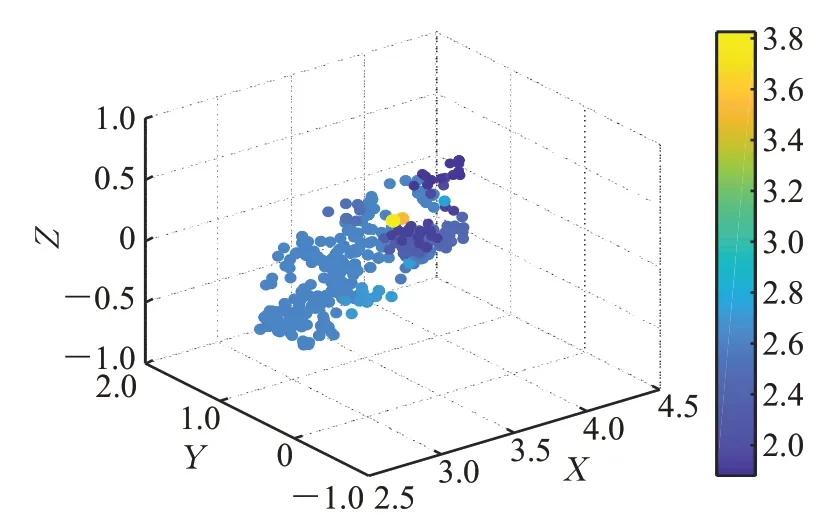
圖16 第六次迭代產(chǎn)生的坐標(biāo)及等效濃度散點(diǎn)圖
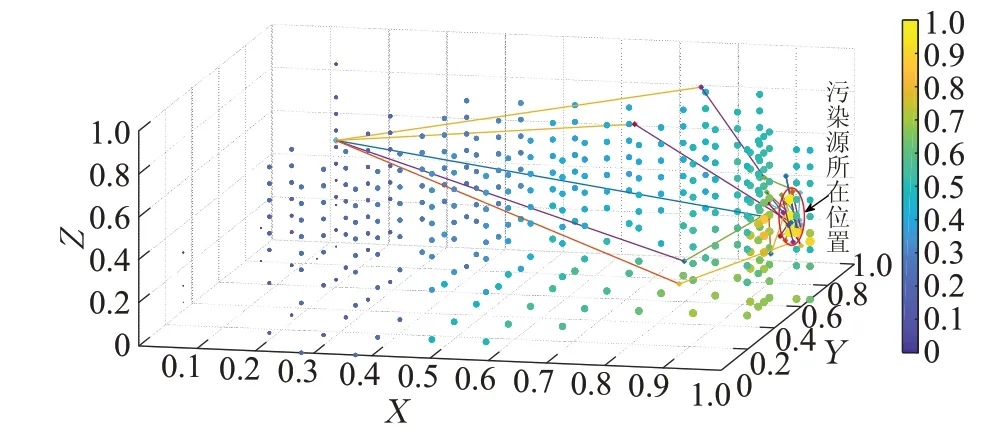
圖17 5次煙羽源定位實(shí)驗(yàn)效果圖
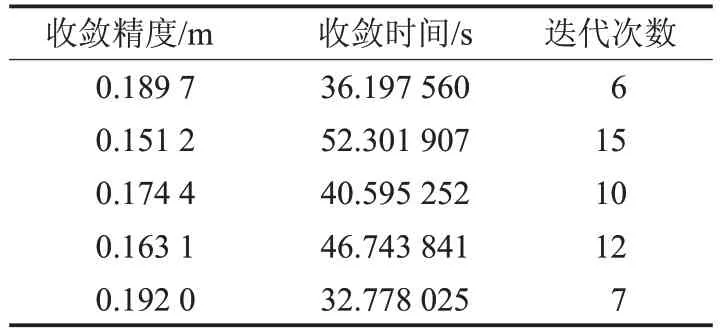
表2 收斂精度及收斂時(shí)間
為了進(jìn)一步驗(yàn)證改進(jìn)的模糊C均值聚類算法的效果,采用同樣步驟,交替反復(fù)采用布谷鳥(niǎo)搜索算法和未改進(jìn)的模糊C均值聚類算法,同樣實(shí)驗(yàn)5次,實(shí)驗(yàn)結(jié)果見(jiàn)表3。由表3知,采用布谷鳥(niǎo)搜索算法結(jié)合改進(jìn)的模糊C均值聚類算法在煙羽源定位精度、平均迭代次數(shù)等方面均優(yōu)于未改進(jìn)的模糊C均值聚類算法。
為了更進(jìn)一步驗(yàn)證本文所提出的布谷鳥(niǎo)搜索算法結(jié)合改進(jìn)的模糊C均值聚類方法(CS-IFCM)的效果,將該方法與Yan等人[16]提出的改進(jìn)保證收斂粒子群優(yōu)化算法(MGC-PSO),Chen等人[17]提出的改進(jìn)的螢火蟲(chóng)優(yōu)化算法(IGSO)及梁志剛等人[18]提出的改進(jìn)的頭腦風(fēng)暴優(yōu)化算法(MBSO)進(jìn)行對(duì)比,結(jié)果如表4所示。由表4可以看出,本文所提出的方法(CS-IFCM)平均運(yùn)行時(shí)間最短,收斂精度最高,但平均迭代次數(shù)比MGC-PSO算法和IGSO算法的平均迭代次數(shù)高,但MGC-PSO算法和IGSO算法的運(yùn)行時(shí)間和收斂精度沒(méi)有CS-IFCM方法優(yōu)。綜合來(lái)看,相比算法MGC-PSO、IGSO、MBSO,本文所提出的方法(CS-IFCM)收斂精度分別提高了1.76%、3.0%、2.1%,平均時(shí)間分別縮短了28.42%、31.31%、26.86%,定位效果明顯優(yōu)于其他三種算法。

表3 FCM聚類算法改進(jìn)前后效果對(duì)比
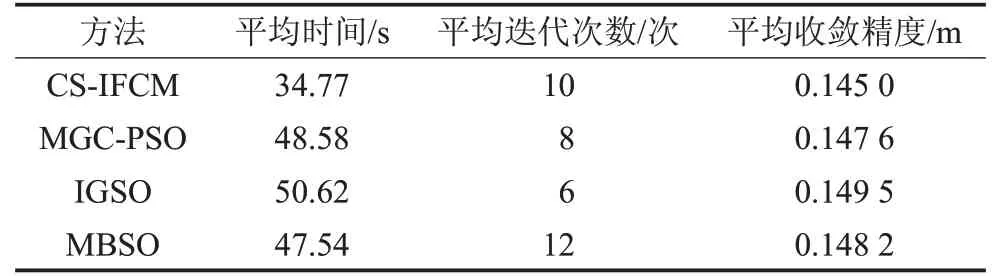
表4 不同定位算法結(jié)果對(duì)比
6 結(jié)束語(yǔ)
針對(duì)三維空間鮮有人研究煙羽源自主定位的問(wèn)題,引入利用歷史數(shù)據(jù)機(jī)制,提出了布谷鳥(niǎo)搜索算法結(jié)合改進(jìn)的模糊C均值聚類算法的自主定位策略。采用評(píng)價(jià)指標(biāo),通過(guò)多組實(shí)驗(yàn)確定了模糊C均值算法參數(shù),為驗(yàn)證所提出的策略獲取了合適的參數(shù)。通過(guò)布谷鳥(niǎo)搜索算法產(chǎn)生三維空間坐標(biāo)數(shù)據(jù),為煙羽源自主定位提供了位置信息,避免了自主定位的盲目性,實(shí)現(xiàn)了定位的自主性;通過(guò)引入密度指標(biāo)函數(shù)對(duì)模糊C均值聚類算法進(jìn)行改進(jìn),確定了聚類算法的初始聚類中心,采用改進(jìn)的FCM算法對(duì)歷史四維特征向量及當(dāng)前迭代生成的四維特征向量構(gòu)成一組新的特征向量聚類分析,獲取三維空間煙羽濃度分布區(qū)域,為布谷鳥(niǎo)搜索算法向濃度大的方向搜索提供了支撐。通過(guò)5次實(shí)驗(yàn)對(duì)所提策略進(jìn)行驗(yàn)證并和最近兩年的定位算法對(duì)比,結(jié)果表明:該方法能夠在已知煙羽發(fā)現(xiàn)情況下,通過(guò)反復(fù)交替使用布谷鳥(niǎo)搜索算法及改進(jìn)的FCM聚類算法,在平均運(yùn)行時(shí)間和收斂精度上均優(yōu)于最近兩年的定位算法,且能夠以平均0.145 0 m的收斂精度自主定位到煙羽源附近,為煙羽源定位提供了方法支持。