氣吸式袋裝中藥配方顆粒自動取藥機構的設計
2020-06-15 02:45:46劉凱,姜凱
液壓與氣動 2020年6期
關鍵詞:中藥
劉 凱, 姜 凱
(1.廣東機電職業(yè)技術學院電氣技術學院, 廣東廣州 510550; 2.北京農(nóng)業(yè)智能裝備技術研究中心, 北京 100097)
引言
開發(fā)具有自動取藥功能的自動化設備可以縮短患者排隊候藥的時間,降低藥師的勞動強度,提高醫(yī)院自動化水平[1-2]。國外從20世紀90年代,就已經(jīng)大規(guī)模開展取藥設備的研究,我國從2000年開始逐漸引進進口設備,并逐漸實現(xiàn)自主研發(fā)并生產(chǎn),江蘇、廣東等藥廠也生產(chǎn)了一系列取藥設備[3-4]。
目前,針對盒裝藥品(西藥、中成藥)的自動取藥設備研究已比較成熟[5],但中藥房的傳統(tǒng)中藥飲片由于形態(tài)各異,較難實現(xiàn)自動化取藥。近十幾年,市面上出現(xiàn)了一種袋裝中藥配方顆粒,憑借其安全衛(wèi)生、藥效高、使用方便等優(yōu)點,得到各大醫(yī)院的廣泛使用[6-8]。
通過調(diào)查發(fā)現(xiàn),國內(nèi)針對中藥配方顆粒的取藥工作仍普遍由人工完成,實際取藥過程中常出現(xiàn)取錯藥的情況,主要原因是配方顆粒均采用袋式包裝,其形態(tài)相似、尺寸規(guī)格相同[9-10],但是這一特點反而利于實現(xiàn)機械化取藥,因此開發(fā)一種針對袋裝中藥配方顆粒的取藥設備勢在必行,本研究基于氣吸原理,設計了一種自動取藥設備,并進行了作業(yè)性能試驗。
1 總體方案設計
1.1 機械手搬運機械臂
自動取藥機主要結構如圖1所示,機械手搬運機械臂由1個垂直方向的鏈傳動機構和2個水平方向的同步帶傳動機構組成,2個抓藥機械手分別固定在2個滑塊上,在同步帶的帶動下沿導軌做水平方向運動,并在鏈傳動機構的帶動下整體做垂直方向運動。由于發(fā)藥系統(tǒng)使用了2個抓藥機械手,既提高了發(fā)藥效率,又兼顧了設備成本,同時避免因抓藥機械手故障造成整機無法正常發(fā)藥的情況發(fā)生。2個抓藥機械手可獨立動作,根據(jù)控制系統(tǒng)的安排分別完成各自的抓取動作。當其中1個抓藥機械手發(fā)生故障時,自動采用應急方案,將故障的抓藥機械手停靠在一側(cè)等待維修,另1個抓藥機械手完成所有抓取動作,此時發(fā)藥時間有所增加,但不會產(chǎn)生停滯。待故障的抓藥機械手修復后,2個抓藥機械手再次同時工作。
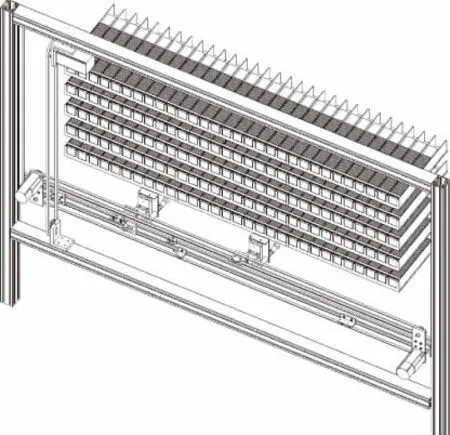
圖1 自動取藥機主要結構
1.2 自動供藥裝置
如圖2所示,市面上常用的配方顆粒普遍為方形袋式塑料包裝,最常見的有50 mm×60 mm和60 mm×60 mm,設計自動供藥裝置的關鍵是有效存儲藥品且方便依次提取顆粒袋。自動供藥裝置如圖3所示,由藥盒、卷簧推進器、柔性阻尼條構成。所有顆粒袋均整齊擺放在儲藥盒內(nèi),并在卷簧推進器的預緊壓片作用下緊密貼合,每次機械手取出1袋顆粒袋后,其他顆粒袋自動向前依次補充。出藥口處安裝的柔性阻尼條的作用是防止中藥顆粒袋取出時因相鄰2袋發(fā)生摩擦作用引起多取的情況發(fā)生。
圖2 袋式中藥配方顆粒
1.3 取藥機械手設計
本研究設計的取藥機械手包括水平雙桿氣缸、豎直雙桿氣缸和1個吸嘴組成,如圖3所示。水平氣缸用于機械手的伸出與縮回,豎直氣缸用于機械手的上升與下降,吸盤用于中藥配方顆粒袋的吸取與釋放。
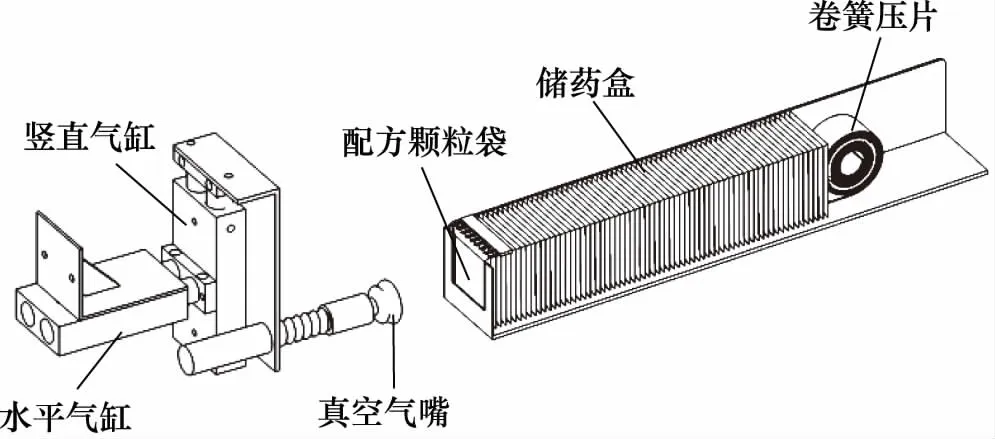
圖3 中藥配方顆粒取藥機構結構圖
吸盤按材質(zhì)分為剛性吸盤和柔性吸盤,柔性吸盤整體硬度比較小,一般只受垂直于吸附面的力。與柔性吸盤相比,剛性吸盤可以承受與吸附面平行的力,而且在吸附柔性吸附面時還可以保證良好的密封性[11],因此取藥機械手采用了剛性吸盤。為了維持機械手吸取配方顆粒的穩(wěn)定性,在吸盤真空回路中串聯(lián)了1個真空壓力傳感器,用于檢測真空度,始終保證吸盤的真空度在一定范圍內(nèi)。
如圖4所示,儲藥盒中藥袋露在取藥機械手前端的范圍較小(15 mm×15 mm),且機械手定位精度小于1 mm,故本研究使用的吸盤直徑為12 mm,通過抓取試驗證明效果較好,未發(fā)生因定位導致的漏抓問題。
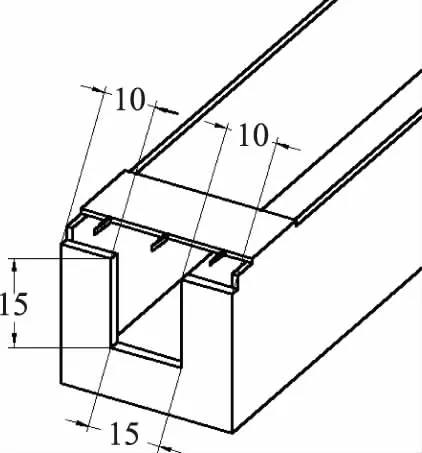
圖4 藥盒尺寸簡圖
1.4 工作原理
取藥機械手的動作過程如圖5所示。初始時氣缸都處于縮回位置,具體動作過程如下:
(1) 取藥機械手移動到待發(fā)藥品位置,水平氣缸伸出,同時真空發(fā)生器啟動;
(2) 當氣嘴接觸到顆粒袋時且真空壓力達到設定值后豎直氣缸伸出,在儲藥盒中的顆粒袋被提起;
(3) 水平氣缸縮回,氣嘴吸力保持;
(4) 豎直氣缸縮回,真空發(fā)生器停止工作,失去吸力的顆粒袋在重力的作用下掉落,完成一次取藥和放藥過程。
一次取藥作業(yè)結束后,所有氣缸回到初始狀態(tài),等待到下一個位置進行取藥。
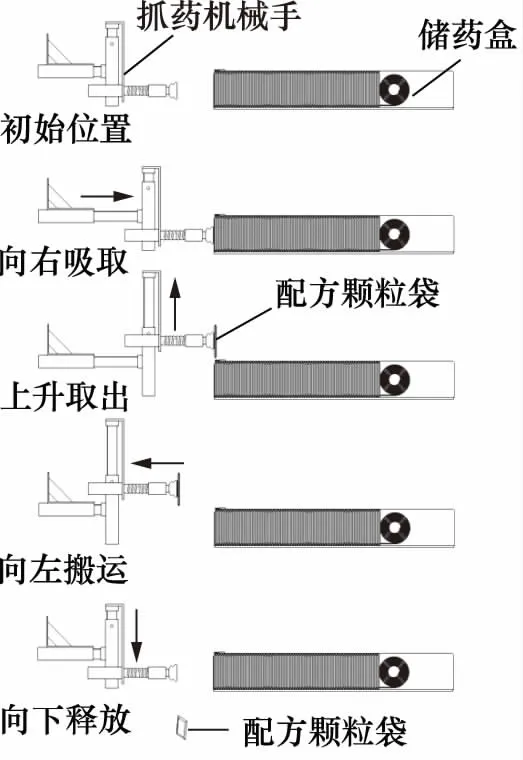
圖5 取藥機械手動作過程
2 氣動系統(tǒng)設計計算
2.1 取藥機械手氣動回路設計
圖6為取藥機械手的氣動回路,取藥機械手以氣吸為主,氣壓驅(qū)動為輔,氣缸和電磁閥均采用無油潤滑型。吸盤與真空發(fā)生器相連,當真空發(fā)生器啟動,吸盤對配方顆粒袋表面可產(chǎn)生吸力。
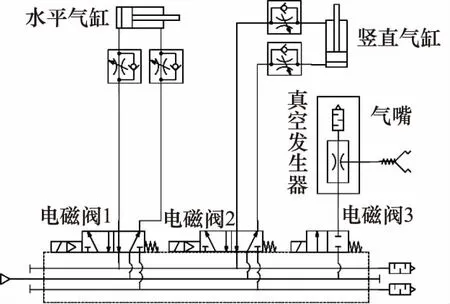
圖6 取藥機械手氣動回路
2個電控二位三通電磁閥分別控制豎直氣缸和水平氣缸;平移氣缸和升降氣缸分別采用雙作用氣缸,通過單向節(jié)流閥調(diào)節(jié)運行速度。
2.2 氣嘴吸附力的分析計算
真空吸盤是真空系統(tǒng)的執(zhí)行元件,由于周圍壓力高于真空吸盤和配方顆粒袋表面間的壓力,故真空吸盤吸附于表面。真空吸盤與真空發(fā)生器相連,壓力越低,吸盤里面的真空度越高[12],真空吸盤的吸附力越大,吸盤吸附就越牢靠。
大氣作用下的壓力計算公式為:
式中,W為吸附力(在1個標準大氣壓下產(chǎn)生的壓力); Δp為真空度(壓強差),MPa;S為吸盤與吸盤面接觸的有效接觸面積,mm2。
由于中藥配方顆粒的可作用面積僅在25 mm直徑范圍內(nèi),為了保障抓取的穩(wěn)定性,滿足對配方顆粒袋的吸附需求本研究設計的取藥機械手的吸盤直徑為20 mm,由于真空發(fā)生器最大壓強差為0.68 MPa,經(jīng)過試驗和計算,得出吸盤吸力為2.19 N。
3 取藥作業(yè)性能試驗
為了檢驗取藥機構的作業(yè)性能,本研究進行了中藥袋取藥作業(yè)性能試驗,在儲藥盒內(nèi)放置70袋以上的中藥配方顆粒,取藥機械手由PLC控制電磁閥實現(xiàn)運動,配方顆粒袋的規(guī)格是50 mm×60 mm,氣嘴真空度為0.68 MPa。圖7為取藥機構試驗臺。

圖7 取藥機構試驗臺
試驗過程機械手按照預設好的路徑進行取藥動作,過程中采用攝像機進行攝錄,同時記錄100 s內(nèi)漏抓次數(shù)、多抓次數(shù)和成功次數(shù),并計算成功率。試驗結果如表1所示。
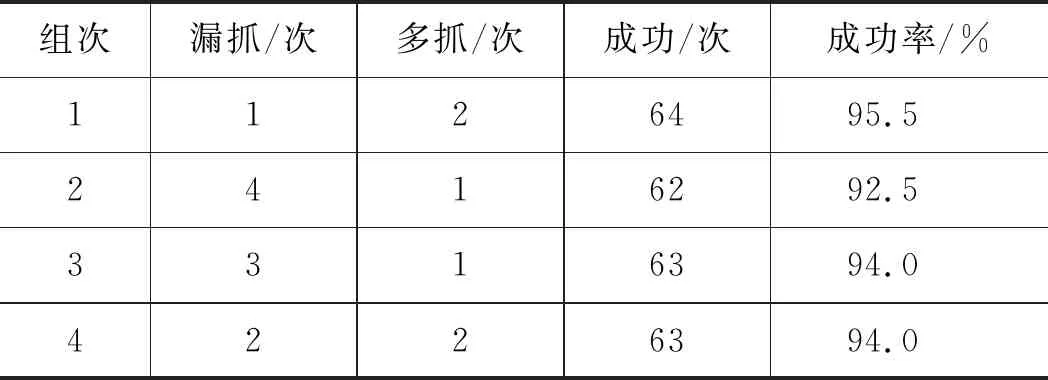
表1 試驗結果
在總共進行的4次試驗過程中,268個中藥配方顆粒袋進行了抓取,成功率在92%~96%之間變動,平均成功率在94%。
不同取藥失敗的原因見表2,造成漏取得原因主要有2個,第1個原因是機械手安裝誤差造成的氣嘴沒有完全接觸到顆粒袋,取藥機械手定位不準確造成氣嘴沒有吸取顆粒袋正中位置;造成多取的原因同樣有2個,第1個原因是儲藥盒上方的阻尼條阻力過小,第2個原因是取藥機械手的豎直氣缸提升過快。
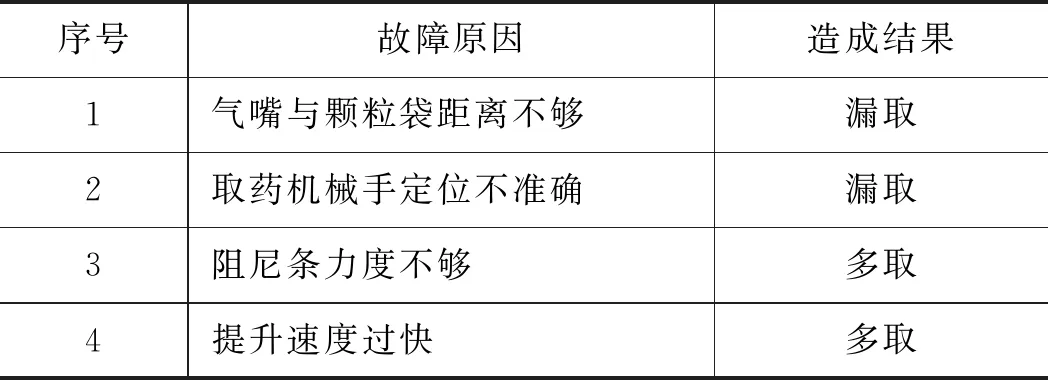
表2 失敗原因分析
通過對試驗臺的位置進行校對后再次進行作業(yè)性能試驗,試驗成功率顯著提高,漏抓、多抓情況較少出現(xiàn),機構運行穩(wěn)定。
4 結論
本研究介紹了一種中藥配方顆粒自動取藥設備,采用氣吸機理實現(xiàn)了配方顆粒的1次取1袋的作業(yè)要求,為突破中藥自動化取藥這一瓶頸提供了新的思路。
根據(jù)成功率、漏取、多取等方面分析了4次取藥試驗出現(xiàn)失敗的原因,為設備的調(diào)整優(yōu)化提供了依據(jù)。
猜你喜歡
中老年保健(2021年5期)2021-12-02 15:48:21
中老年保健(2021年4期)2021-12-01 11:19:40
中老年保健(2021年4期)2021-08-22 07:08:32
中國現(xiàn)代中藥(2020年10期)2020-12-16 08:53:18
金橋(2020年7期)2020-08-13 03:07:00
基層中醫(yī)藥(2020年12期)2020-07-22 06:34:38
中國現(xiàn)代中藥(2020年4期)2020-06-10 09:56:34
基層中醫(yī)藥(2018年6期)2018-08-29 01:20:20
長春中醫(yī)藥大學學報(2017年1期)2017-04-16 05:56:49
肝博士(2015年2期)2015-02-27 10:49:49