三通閥控單作用缸在電液位置伺服系統(tǒng)的應(yīng)用研究
2020-06-15 02:45:48錢占松
液壓與氣動(dòng) 2020年6期
錢占松
(1.南京機(jī)電液壓工程研究中心航空機(jī)電系統(tǒng)綜合航空科技重點(diǎn)實(shí)驗(yàn)室, 江蘇南京 210061; 2.中航工業(yè)南京伺服控制系統(tǒng)有限公司, 江蘇南京 210061)
引言
液壓控制系統(tǒng)具有結(jié)構(gòu)緊湊、功率大、精度高、響應(yīng)速度快等優(yōu)點(diǎn),現(xiàn)已廣泛應(yīng)用于冶金、機(jī)械、飛機(jī)、船舶等領(lǐng)域[1]。目前各領(lǐng)域多數(shù)用液壓位置控制系統(tǒng)及力控制系統(tǒng)[2],系統(tǒng)中關(guān)鍵液壓元件多采用三位四通電液伺服閥,執(zhí)行元件多采用雙作用對稱或非對稱的液壓缸或馬達(dá),這種控制系統(tǒng)往往是要求雙向輸出,并且輸出精度高。有些系統(tǒng)對單向輸出有穩(wěn)定性及高精度要求,但對反向輸出要求并不高,如精軋機(jī)正彎輥液壓系統(tǒng)、電子防滑剎車系統(tǒng)[3]、船舵負(fù)載模擬系統(tǒng)[4],該系統(tǒng)如采用四通伺服閥控單出桿非對稱液壓缸,則非對稱缸在換向的瞬間存在很大的壓力突變[5],這對輸出力的控制很不利;并且四通滑閥需要用配磨[6]來保證4個(gè)軸向配合尺寸,工藝復(fù)雜、成本高。三通閥可用差動(dòng)方式控制單出桿非對稱液壓缸,這樣可以根據(jù)負(fù)載情況調(diào)整系統(tǒng)零位[7],使2個(gè)輸出方向控制性能對稱,避免了換向輸出力突跳的弊端,而三通閥芯僅需要1個(gè)關(guān)鍵性軸向配合尺寸,加工工藝簡單、成本低。
坦克炮控系統(tǒng)定型試驗(yàn)[8]所用施力系統(tǒng)對單方向要求有平穩(wěn)的位置和力的輸出,對反向僅要求有速度、加速度的快速性要求[9-10]。本研究根據(jù)某型坦克定型試驗(yàn)所用施力系統(tǒng)進(jìn)行位置控制系統(tǒng)理論分析及仿真研究。
1 炮控測試系統(tǒng)的組成及工作原理
炮控測試系統(tǒng)結(jié)構(gòu)如圖1所示,主要由工控機(jī)、位置和施力控制器、電液伺服閥,位移傳感器、力傳感器等組成。坦克火炮身管即為測試系統(tǒng)的負(fù)載。

圖1 炮控測試系統(tǒng)結(jié)構(gòu)圖
炮控測試系統(tǒng)有三種工作模式:測試模式、快速撤回模式、施力模式,其中測試模式和快速撤回模式屬于位置閉環(huán)控制,施力模式為力閉環(huán)控制。在測試模式時(shí),系統(tǒng)選擇位置控制器,控制模式為位置閉環(huán),該模式的目的是測試坦克火炮身管的剛度,液壓缸活塞到達(dá)具體位置,力傳感器的顯示值與炮管的轉(zhuǎn)角的比值即為剛度值,此時(shí)該力對位置閉環(huán)來說屬于干擾力;施力模式主要是對坦克炮控系統(tǒng)的機(jī)械傳動(dòng)間隙、摩擦力矩、不平衡力矩的測量,施力模式主要考核快速施力和均勻施力兩個(gè)特性指標(biāo);快速撤回模式是系統(tǒng)施力完成后,使液壓缸活塞快速離開炮管,離開后檢測炮管的振蕩情況[11],同時(shí)也防止炮管的振蕩對力傳感器進(jìn)行撞擊[12],破壞傳感器。
炮控測試系統(tǒng)主要指標(biāo)如下:
(1) 施力要求:①施力范圍:10~600 N;
②施力精度:高于1%。
(2) 位置要求:①全行程:80 mm;
②定位精度:≤0.15 mm。
(3) 撤離:最大加速度:≥2700 mm/s2。
本研究主要研究測試模式和快速撤回模式的實(shí)現(xiàn)。
2 建立系統(tǒng)數(shù)學(xué)模型
炮控測試系統(tǒng)中執(zhí)行機(jī)構(gòu)采用三通閥控制帶復(fù)位彈簧的單出桿液壓缸結(jié)構(gòu)。下面對該動(dòng)力機(jī)構(gòu)建立數(shù)學(xué)模型。
2.1 直驅(qū)三通閥
炮控測試系統(tǒng)中三通閥選用FF-132電液壓力伺服閥,結(jié)構(gòu)原理圖如圖2所示,該閥主要由線性力馬達(dá)及殼體組件組成,線性力馬達(dá)主要由2個(gè)永久磁鋼、控制線圈、軸組件和對中彈簧組成,殼體部分主要包括殼體、閥套、閥芯組件。

圖2 動(dòng)力機(jī)構(gòu)示意圖
線性力馬達(dá)工作是雙向的,輸入信號為0時(shí),銜鐵處于中位,此時(shí)左右氣隙相等;輸入電流信號為正時(shí),馬達(dá)產(chǎn)生正的驅(qū)動(dòng)力,驅(qū)動(dòng)閥芯向左運(yùn)動(dòng);輸入電流信號為負(fù)時(shí),馬達(dá)產(chǎn)生負(fù)的驅(qū)動(dòng)力,驅(qū)動(dòng)閥芯向右運(yùn)動(dòng)。閥芯位移大小與輸入電流成比例關(guān)系。馬達(dá)的對中彈簧具有足夠大的剛度,保證銜鐵在偏離中位的額定工作范圍時(shí),馬達(dá)能可靠的工作,在切斷系統(tǒng)電流信號時(shí),他的向心力剛度足以克服摩擦力使閥芯回到中位,具有失效對中功能。
1) 輸入電流與閥芯位移的關(guān)系[13]
(1)
式中,Xv—— 閥芯位移
I—— 力馬達(dá)輸入電流
Ka—— 力馬達(dá)放大倍數(shù)
ωv—— 力馬達(dá)固有頻率
ζv—— 力馬達(dá)阻尼系數(shù)
2) 閥芯部分——線性化流量方程[14]
三通閥閥芯在零位時(shí),負(fù)載壓力為0.5ps,此時(shí)伺服閥輸出的流量線性化方程為:
QL=KqXv-KcpL
(2)

式中,QL—— 閥輸出流量
Kq—— 閥流量增益
Kc—— 流量-壓力系數(shù)
Kp—— 閥壓力增益
U—— 閥正開口大小
ps—— 供油壓力
ρ—— 液壓油密度
W—— 窗口梯度
2.2 帶彈簧的單作用缸受力分析
當(dāng)閥芯在零位時(shí),設(shè)計(jì)彈簧使彈簧在預(yù)壓狀態(tài)下液壓缸也在零位,液壓缸的零位即為伸出桿端部的力傳感器正好接觸坦克火炮身管。在零位附近時(shí)分析單出桿液壓缸受力情況。
式中,Ap—— 無桿腔作用面積
K1—— 彈簧剛度
Xp—— 活塞移動(dòng)距離
K2—— 火炮身管剛度,y<0時(shí),K2=0
F1—— 彈簧預(yù)壓力
mt—— 活塞質(zhì)量
Bp—— 活塞運(yùn)動(dòng)阻尼系數(shù)
2.3 液壓缸流量連續(xù)性方程
一般閥與液壓缸連接的管道設(shè)計(jì)成對稱的,并且短而粗,這樣管道中的壓力損失可以忽略。則三通閥輸出的流量用于活塞運(yùn)動(dòng)、管路泄漏及油液壓縮,故液壓缸流量連續(xù)性方程為:
(4)
式中,Ctp—— 系統(tǒng)外泄漏系數(shù)
Vt—— 液壓缸初始位置時(shí)無桿腔及油道體積之和,將單出桿缸的初始位置設(shè)定在總行程的1/2
β—— 液壓油體積彈性模量
2.4 單出桿缸初始位置
伺服閥閥芯在零位,輸出壓力為0.5ps,設(shè)計(jì)彈簧使此時(shí)液壓缸活塞達(dá)到力平衡狀態(tài)。故有:
F1=0.5Apps
(5)
2.5 開環(huán)特性分析
對上述式(1)~式(4)整理,可以得出三通閥控單作用缸系統(tǒng)模型框圖,框圖如圖3所示。
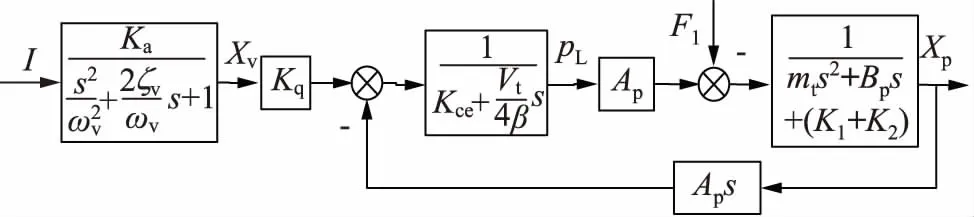
圖3 系統(tǒng)模型框圖
框圖中各參數(shù)如表1所示。
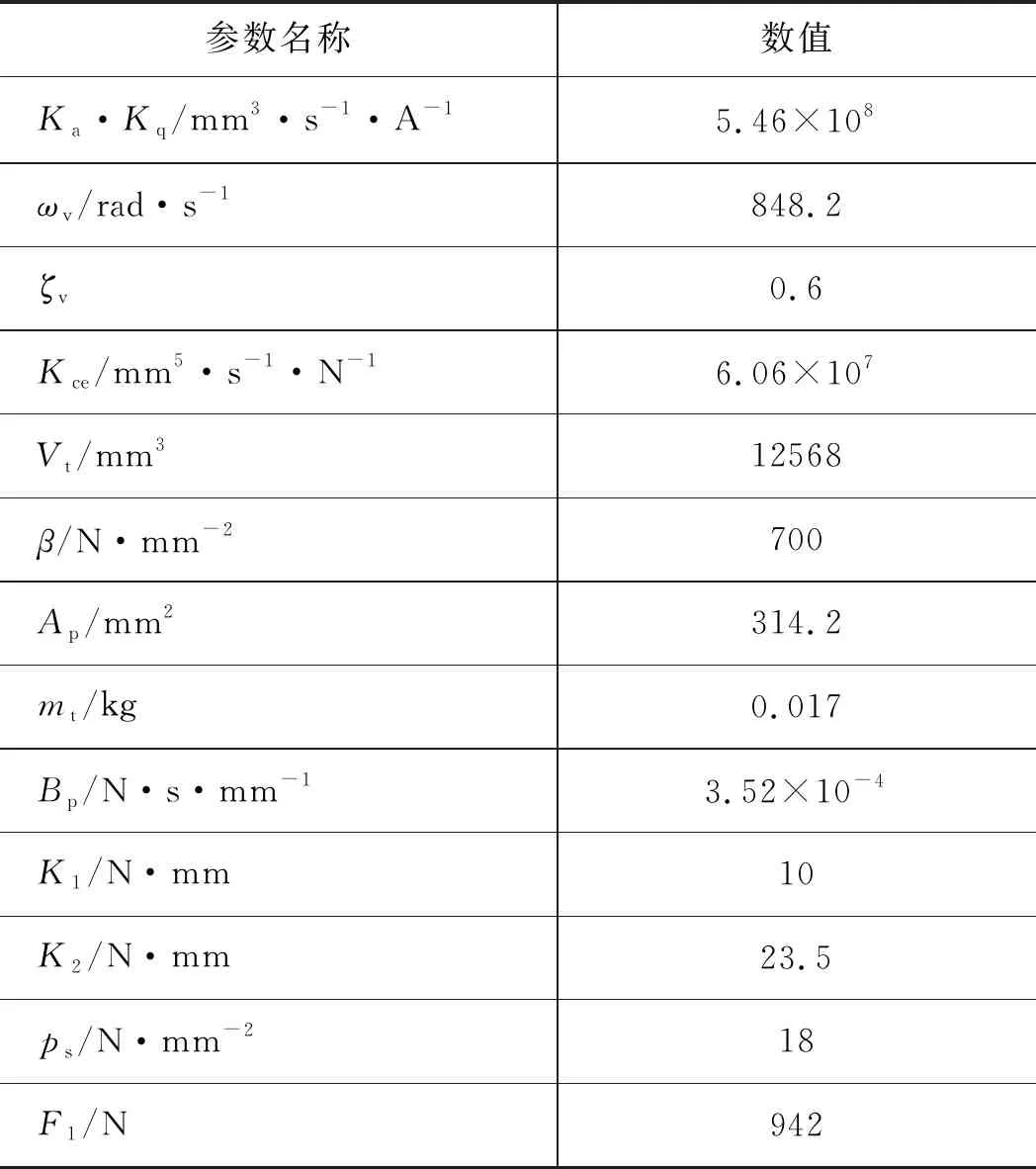
表1 系統(tǒng)基本參數(shù)表
根據(jù)圖3所示系統(tǒng)框圖,在Simulink中搭建系統(tǒng)模型方塊圖,如圖4所示。
從而可以得出三通閥控單作用缸的開環(huán)特性,其Bode圖如圖5所示,系統(tǒng)模型傳遞函數(shù)為:
其中,C(s)=1.616×1020s2+1.616×1022s-0.02672
R(s)=s7+1.351×107s6+1.388×1011s5+
9.852×1014s4+9.816×1016s3+7.158×1018s2+7.056×1020s

圖4 系統(tǒng)模型在Simulink中框圖
從圖5中可以看出本系統(tǒng)中,在13.6 Hz處存在一個(gè)幅值大小為72.2 dB的峰值,并且在峰值附近,相位迅速滯后到180°,從而可知,該系統(tǒng)若想調(diào)試滿足性能指標(biāo)要求,首先需要解決的是閉環(huán)穩(wěn)定性問題。
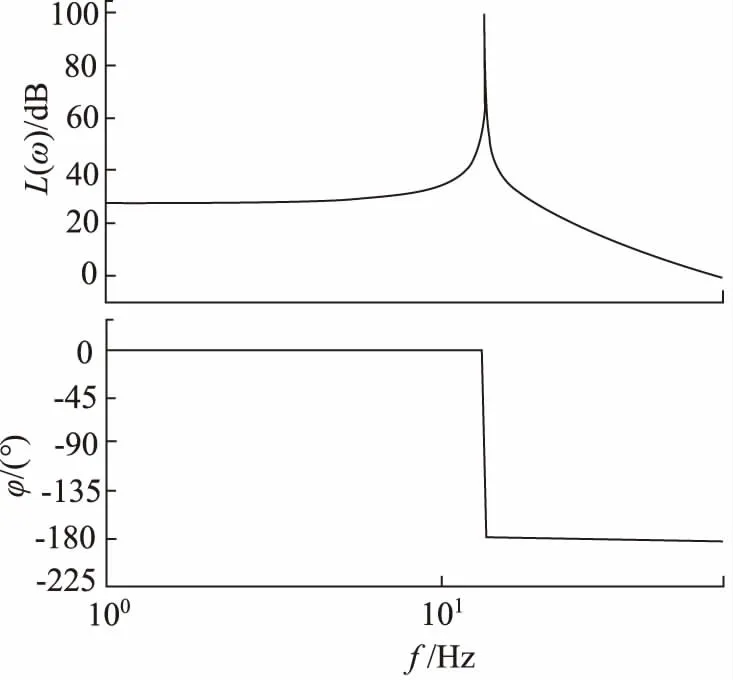
圖5 系統(tǒng)開環(huán)Bode圖
為分析方便,需要求其系統(tǒng)開環(huán)零、極點(diǎn),對高階的零、極點(diǎn)不予以考慮,再進(jìn)行零極點(diǎn)對消,將低階的零、極點(diǎn)進(jìn)行整合,最終得出系統(tǒng)低階模型。各零、極點(diǎn)如表2所示。

表2 系統(tǒng)零、極點(diǎn)
將0、-100,零、極點(diǎn)對消,僅保留極點(diǎn)-0.01±85.2i,可以得出降階后的系統(tǒng)傳遞函數(shù)為:
將降階后的傳遞函數(shù)與系統(tǒng)原模型傳遞函數(shù)對比,其Bode圖如圖6所示,圖中實(shí)線為原系統(tǒng)模型曲線,虛線為降階后的曲線。

圖6 降階后與原模型對比
通過對比可以看出,降階前的模型與降階后的模型在13.6 Hz之前基本接近一致,13.6 Hz之后僅有相位的差異。
3 控制器及仿真
3.1 控制器設(shè)計(jì)
1) 速度反饋
由上述分析可知,系統(tǒng)模型簡化后為二階振蕩環(huán)節(jié),并且阻尼比為1.71×10-4接近0,所以造成了諧振峰值非常大,該峰值嚴(yán)重影響了系統(tǒng)穩(wěn)定性,所以首先考慮采取校正環(huán)節(jié)提高阻尼系數(shù)。
對該系統(tǒng)采用速度反饋,速度可由位置微分得到,反饋系數(shù)為K3,速度閉環(huán)后得到的系統(tǒng)模型為G2。
由G2可知,速度反饋可以提高并且僅影響模型的阻尼比,極大的提高了閉環(huán)后的系統(tǒng)穩(wěn)定性。取K3=0.0018。將速度反饋應(yīng)用到原模型,應(yīng)用前后的對比如圖7所示。
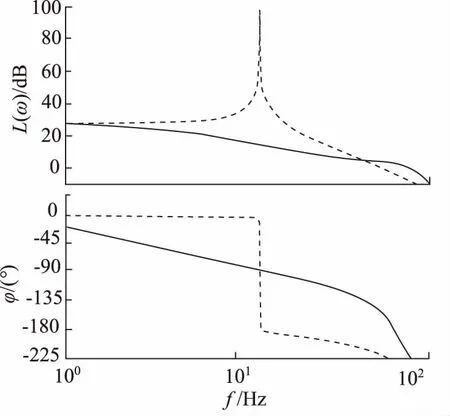
圖7 速度反饋使用前后對比
圖7中虛線與實(shí)線分別代表為未使用和使用速度反饋,從圖中可以看出,使用速度反饋對原系統(tǒng)起到的作用是提高了穿越頻率,并且非常明顯的降低了諧振峰值。
由圖7可得到,增加速度反饋后,系統(tǒng)在截止頻率98.4 Hz處,系統(tǒng)相位為-218°,在穿越頻率82.3 Hz處,系統(tǒng)幅值為2.1 dB,所以速度校正后的系統(tǒng)不穩(wěn)定,采取的措施應(yīng)提高幅值裕度和相位裕度。
2) 串聯(lián)滯后-超前校正
串聯(lián)校正可分為超前校正、滯后校正、滯后-超前校正,超前校正網(wǎng)絡(luò)可以提供很大的相角超前量,從而可以得到系統(tǒng)所需要的相角裕度;滯后校正可以降低系統(tǒng)截止頻率,用來滿足系統(tǒng)相位裕度的要求,并且可以提高系統(tǒng)穩(wěn)態(tài)精度。
針對該系統(tǒng)特點(diǎn), 需要采用串聯(lián)滯后-超前校正,這樣校正后的系統(tǒng)響應(yīng)速度快、相角裕度大、穩(wěn)態(tài)精度高。選用串聯(lián)校正網(wǎng)絡(luò)傳遞函數(shù)為:
串聯(lián)校正網(wǎng)絡(luò)使用前后系統(tǒng)開環(huán)特性對比曲線如圖8所示,圖8中實(shí)線和虛線分別代表校正前和校正后的Bode圖,校正后穿越頻率19.3 Hz,相位裕度78°,幅值裕度10.3 dB。

圖8 串聯(lián)校正使用前后對比
3) 系統(tǒng)閉環(huán)特性
在系統(tǒng)模型中引入速度反饋、串聯(lián)校正控制器再進(jìn)行閉環(huán),其在Simulink中的框圖如圖9所示。
系統(tǒng)閉環(huán)頻率特性如圖10所示。從圖10可知,加入控制器之后,系統(tǒng)幅頻寬(-3 dB)為30.7 Hz,相頻寬(-90°)為36.4 Hz。
3.2 系統(tǒng)指標(biāo)仿真
炮控性能參數(shù)測試系統(tǒng)有平穩(wěn)性要求、快速定位、快速撤回加速的要求。

圖9 閉環(huán)控制框圖
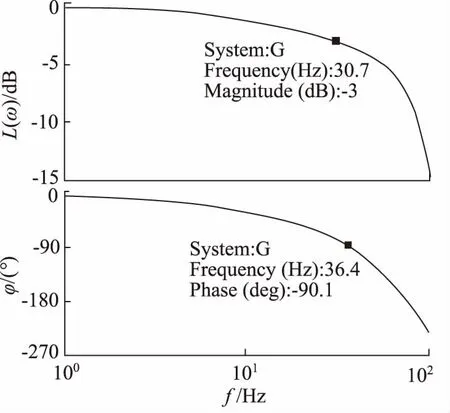
圖10 閉環(huán)頻率特性
1) 平穩(wěn)性測試
平穩(wěn)性要求可以用低速信號來考核,對系統(tǒng)輸入速度為0.5 mm/s,輸出曲線如圖11所示,圖中實(shí)線和虛線分別代表指令信號和跟蹤曲線。由圖11可知,系統(tǒng)低速跟蹤曲線平滑,無突跳現(xiàn)象,并且跟蹤誤差為0.005 mm,滿足指標(biāo)要求。
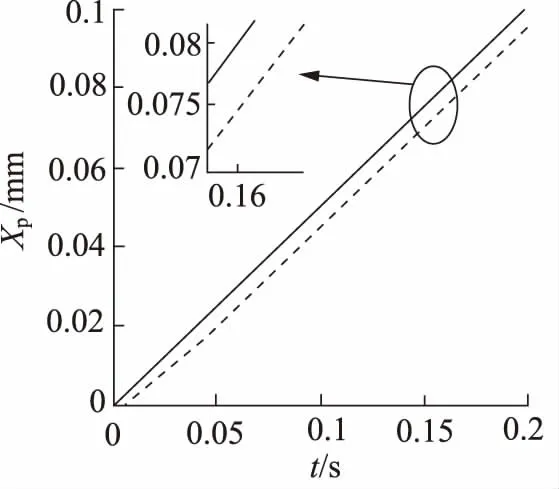
圖11 低速跟蹤曲線
2) 快速性及穩(wěn)態(tài)精度測試
快速性由幅值為40 mm的階躍信號測試,由圖12可知,在0.06 s達(dá)到定位,并且階躍過程中無突跳現(xiàn)象,對力傳感器起到保護(hù)作用,定位精度為0.004 mm。
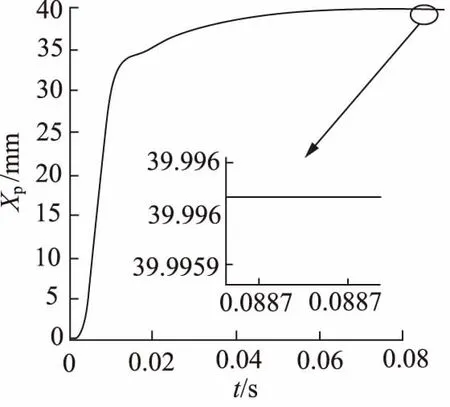
圖12 系統(tǒng)階躍響應(yīng)
3) 反向快速撤離測試
快速撤離時(shí),坦克炮管會(huì)產(chǎn)生自激震蕩,為避免炮管對力傳感器進(jìn)行撞擊,單作用缸開始快速撤離階段0.2 s以內(nèi)加速度a應(yīng)不小于2700 mm/s2,并且撤離時(shí)炮管對單作用缸速度無彈力作用,故K2=0。
撤離按50 mm反向階躍信號來進(jìn)行測試。階躍響應(yīng)及加速度分別如圖13與圖14所示。從圖14中可以看出,快速撤離時(shí)0.02 s以內(nèi)最大加速度為23800 mm/s2,滿足指標(biāo)要求。
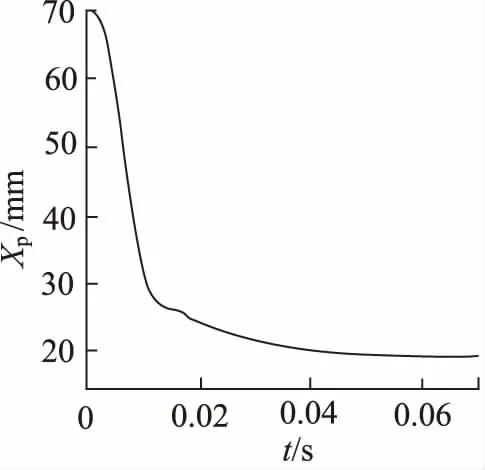
圖13 快速撤離曲線
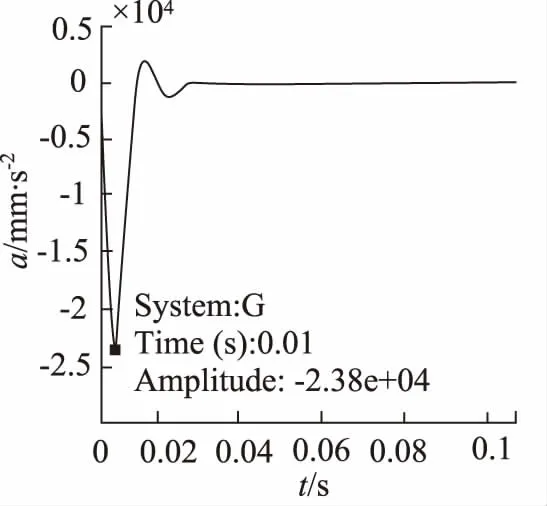
圖14 快速撤離加速度曲線
4 炮控性能測試系統(tǒng)試驗(yàn)
4.1 炮控性能測試系統(tǒng)組成
炮控性能測試系統(tǒng)主要由液壓油源、液壓缸、電液流量伺服閥、工業(yè)控制計(jì)算機(jī)、控制電路、控制測試軟件等組成,如圖15所示。
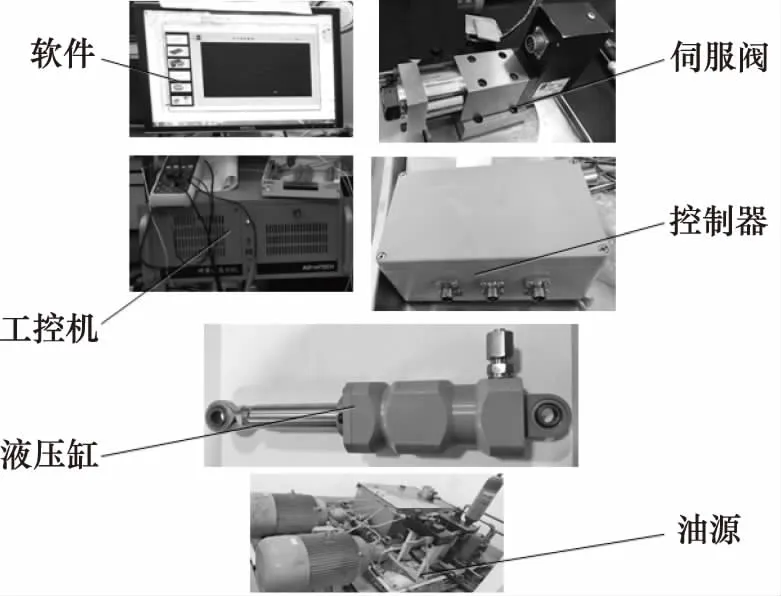
圖15 炮控性能測試系統(tǒng)組成
控制軟件使用經(jīng)典的Visual C++6.0和LABVIEW 2019[15]開發(fā),選定了采樣周期為1 ms,在每1 ms周期內(nèi)需要完成控制參數(shù)的更新數(shù)據(jù)輸入、數(shù)據(jù)運(yùn)算、數(shù)據(jù)輸出等主要工作。
該炮控性能測試系統(tǒng)的主要硬件如下:
(1) 研華610H工業(yè)控制計(jì)算機(jī);
(2) 研華AD7606模數(shù)轉(zhuǎn)換芯片;
(3) STM32F407VGT6高性能微控制器[16]。
4.2 炮控性能測試系統(tǒng)試驗(yàn)
1) 平穩(wěn)性測試
對系統(tǒng)輸入速度為0.5 mm/s的指令,輸出曲線如圖16所示,系統(tǒng)低速跟蹤曲線平滑,無突跳現(xiàn)象,并且跟蹤精度0.057 mm,滿足指標(biāo)要求。
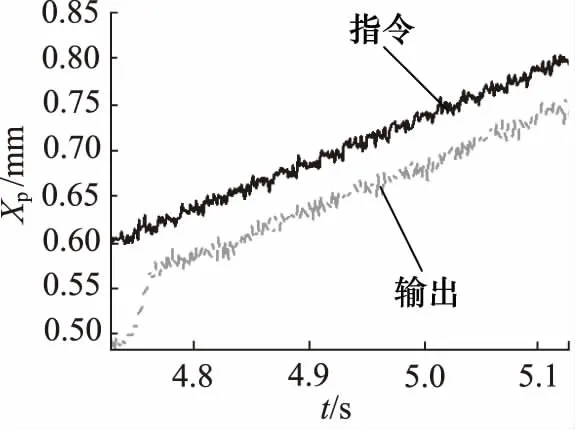
圖16 低速跟蹤曲線
2) 快速性及穩(wěn)態(tài)精度測試
快速性由位置為20 mm階躍至60 mm指令信號測試,由圖17可知,在0.0415 s達(dá)到定位,并且階躍過程中無突跳現(xiàn)象,對力傳感器起到保護(hù)作用,定位精度為0.05 mm。
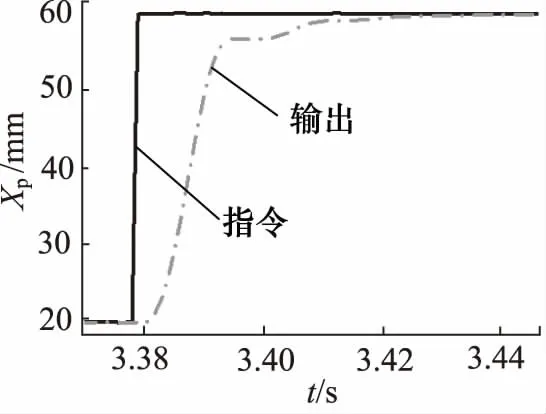
圖17 系統(tǒng)階躍響應(yīng)測試
3) 反向快速撤離測試
撤離從位置70 mm反向階躍至20 mm的指令信號進(jìn)行測試。階躍響應(yīng)及加速度分別如圖18與圖19所示。從圖18中可以看出,反向階躍響應(yīng)0.0502 s,從圖19中可以看出,快速撤離時(shí),最大加速度a為3686.6 mm/s2,滿足指標(biāo)要求。

圖18 快速撤離曲線
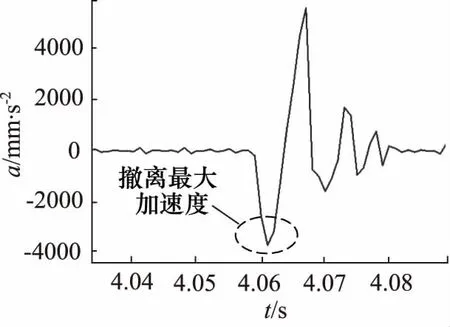
圖19 快速撤離加速度曲線
5 結(jié)論
本研究以炮控測試系統(tǒng)為例,對三通閥控單作用缸在位置系統(tǒng)進(jìn)行了建模、仿真、試驗(yàn)驗(yàn)證,發(fā)現(xiàn)系統(tǒng)模型具有諧振峰值大、不穩(wěn)定等特點(diǎn)。通過設(shè)計(jì)速度反饋校正提高了系統(tǒng)的阻尼,極大減小了諧振峰值,前向通道通過應(yīng)用串聯(lián)滯后-超前校正網(wǎng)絡(luò),閉環(huán)后的系統(tǒng)滿足平穩(wěn)性、快速定位、快速撤離等指標(biāo)要求。
三通閥具有配合尺寸少、工藝簡單、成本低等優(yōu)點(diǎn),本研究探究了三通閥控單作用缸的模型及控制策略,拓展了三通閥在伺服系統(tǒng)中的應(yīng)用范圍,對工程具有很強(qiáng)的指導(dǎo)意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19