閥控液壓馬達角位移隨動系統動態特性研究
2020-06-15 02:45:42閆政
液壓與氣動 2020年6期
關鍵詞:系統
閆 政
(晉中學院機械學院, 山西晉中 030600)
引言
閥控液壓馬達作為一種典型的液壓控制系統,廣泛被應用于礦山、建筑及工程機械等領域[1]。根據被控物理量的不同,閥控液壓馬達可以分為閥控馬達角位移控制系統和角速度控制系統。然而, 現有針對閥控液壓馬達系統的控制方法多是基于PID控制器實現對馬達輸出軸轉角和轉速的控制,雖然這種方法具有簡單易實現的優點,但就設計而言,不具有任意性,且PID參數整定過程需要很強的經驗性[2]。為此,對閥控液壓馬達控制器設計方法進行改進,對改善系統控制特性具有重要意義。
針對閥控液壓馬達系統的控制特性,李軍等[3]建立了閥控液壓馬達角位移控制系統的數學模型,并通過仿真驗證了所建立模型的正確性;DASGUPTA K等[4]基于鍵合圖仿真技術構建了伺服閥控液壓馬達系統的仿真模型,并對伺服閥PI控制器參數對系統動態特性的影響進行仿真分析;JIANG等[5]提出一種基于模糊神經網絡控制的閥控馬達角速度智能控制方法,并利用MATLAB軟件進行仿真分析,研究結果表明,所提出的智能控制方法能夠提高閥控馬達系統的自適應能力與魯棒性;王存堂等[6]以提高葉片馬達速度控制精度為目的,結合理論模型建立了高速開關閥控葉片馬達的數學模型,并基于 PID 控制算法對該系統進行仿真分析,證明了PID控制器對該系統具有良好的轉速控制效果;楊前明等[7]以某閥控雙馬達角速度控制系統為對象,將PID控制器應用到基于PLC的速度同步控制方案中,通過仿真研究證明了PID控制器能夠提高系統的同步控制性能;楊國來等[8]建立了閥控液壓馬達速度控制系統的數學模型,并基于MATLAB/Simulink軟件對系統進行仿真分析,研究結果表明:PID控制器能夠改善系統的抗負載性;雷曉順等[9]針對閥控馬達速度系統采用PID控制器時易受負載干擾的缺陷,提出采用模糊PID控制算法,通過計算機仿真和試驗研究表明,采用模糊PID控制器,可以改善閥控液壓馬達恒轉速控制系統的抗負載性能。畢世書等[10]針對閥控液壓馬達速度控制系統中采用PID控制器存在的參數整定復雜且魯棒性較低的問題,提出采用遺傳算法對系統PID控制參數進行優化,通過仿真實驗證明了該方法能夠提高系統的魯棒性及動態特性。晉民杰等[11]以某型液壓起重機為研究對象,建立了基于PID控制器的閥控液壓馬達系統的閉環控制系統, 并對PID參數進行非線性優化,改善了系統的控制特性;KUMAR S等[12]針對比例閥控液壓馬達特性進行了仿真與試驗研究,結果表明:采用閉環控制可以降低系統對負載變化的敏感度,且閉環反饋增益系數會對系統穩定性與能效產生影響。
綜合分析上述研究可知,現有針對閥控液壓馬達控制特性的研究多是基于PID控制算法,其在控制器設計時需要在參數整定方面具有很強的經驗性。另一方面,PID控制方法屬于經典控制范疇,其設計過程不具有任意性。此外,現有研究多是針對閥控液壓馬達速度控制系統的控制特性進行研究,而對閥控液壓馬達位置控制系統的研究較少。
針對上述問題,本研究采用極點配置法對閥控液壓馬達角位移控制系統進行設計,并對基于PID閉環控制、極點配置法及含有狀態觀測器的極點配置法的閥控液壓馬達角位移控制系統特性進行對比研究。簡要介紹閥控液壓馬達系統工作原理;分別建立閥控液壓馬達角位移控制系統的傳遞函數、方框圖以及狀態空間表達式,并對該系統的時-頻域特性與能控-能觀測性進行分析;在此基礎上,分別基于3種控制方法對閥控液壓馬達角位移控制系統進行設計,并利用MATLAB/Simulink軟件對系統階躍響應進行了仿真分析,以對比各控制方法在閥控液壓馬達系統中的應用效果以及狀態觀測器極點位置對系統動態特性的影響,為改善閥控液壓馬達系統的動態特性提供理論依據。
1 閥控液壓馬達工作原理
閥控液壓馬達是一種典型的開式液壓系統,主要包括動力元件(液壓泵)、控制元件(三位四通閥)、執行元件(液壓馬達)以及外部負載,其原理圖如圖1所示。通過控制三位四通閥的位置以及開度實現對液壓馬達輸出軸角速度和角位移的控制。
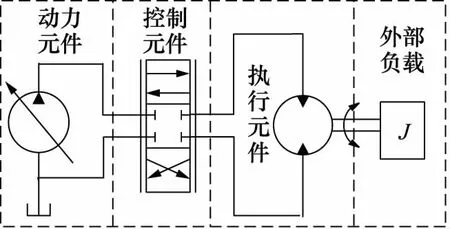
圖1 閥控液壓馬達系統原理圖
2 閥控液壓馬達數學模型
2.1 傳遞函數及方框圖
為了建立閥控馬達角位移控制系統的傳遞函數和方框圖。首先,在假定三位四通閥為零開口四邊滑閥,液壓泵出口壓力恒定不變,油箱壓力為0的基礎上,設系統的負載流量為QL,流量增益系數為Kq,滑閥閥芯位移為Xv,流量-壓力增益系數為Kc,負載壓力pL,則滑閥的線性化流量基本方程為:
QL=KqXv-KcpL
(1)
其次,在忽略三位四通閥與馬達之間管路的壓力損失及動態特性的前提下,設馬達排量和輸出軸旋轉角度分別為Dm和θm,馬達兩邊腔室及管路的等效總體積和泄漏系數分別為Vt和Ctm,馬達的輸出軸及外部負載的等效轉動慣量為Jt, 黏性阻尼系數為Bm,外部負載扭矩及彈簧剛度分別為TL和G,建立液壓馬達的流量連續性方程與外負載平衡方程如式(2)和式(3)所示:

(2)
pLDm=Jts2θm-Bmsθm+Gθm+TL
(3)
根據上述式(1)~式(3)所示的閥控馬達基本方程,繪制閥控馬達角位移控制系統方框圖如圖2所示,圖中,輸入信號為液壓閥芯位移,輸出量為液壓馬達輸出軸的旋轉角度。同時,聯立上述基本方程,消去相應的中間變量,便可以得到馬達輸出軸轉角公式如式(4)所示:
(4)

圖2 液壓閥控馬達系統方框圖
閥控液壓馬達系統的外部負載多為慣性負載[13],即外負載扭轉彈簧剛度G一般為0,且馬達與負載之間的黏性阻尼系統極小(忽略不計)。 因此,將式(4)進行化簡,可以得到閥控液壓馬達角位移控制系統的傳遞函數為:
(5)

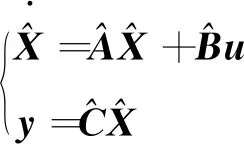
2.2 系統狀態空間表達式


(6)
3 閥控液壓馬達系統特性分析
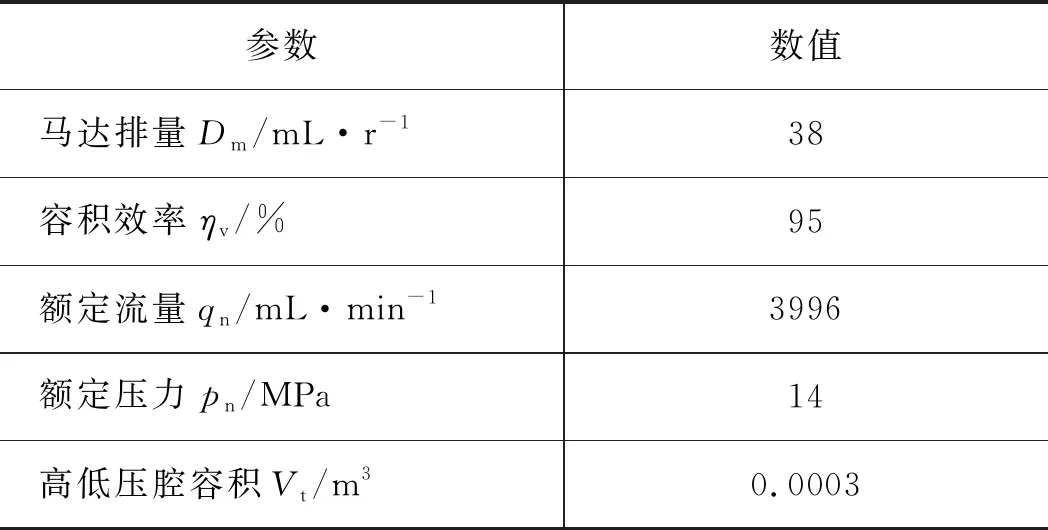
以某閥控液壓馬達系統為研究對象,對系統時域、頻域特性、能控及能觀性進行分析,為后文閉環控制系統設計奠定基礎。所述閥控馬達系統中的滑閥流量增益和流量-壓力系數分別為1.5×10-16m3·s-1·Pa-1和4 m2·s-1,馬達輸出軸所連接外部慣性負載及其輸出軸的等效轉動慣量為0.2 kg·m2,馬達主要參數如表1所示。
根據推導過程,代入具體參數,得到該閥控馬達角位移控制系統的傳遞函數如式(7)所示:
(7)
需要注意的是,這里得出的傳遞函數是指系統開環傳遞函數。圖3為利用MATLAB軟件繪制的系統極點分布位置示意圖,由圖可知,該系統開環傳遞函數的3個極點分別為0和-11±39.5i,存在零極點,故該系統為非最小相位系統。

圖3 極點分布位置示意圖
3.1 時域分析
圖4和圖5為閥控液壓馬達角位移控制系統的開環單位階躍響應曲線和單位脈沖響應曲線,由圖4可知,該系統的單位階躍響應曲線隨時間的推移呈現出無限上升的趨勢,這是因為當系統輸入信號為單位階躍信號時,根據Laplase變換的終值定理,可得其穩態輸出值為:
(8)

圖4 單位階躍響應曲線
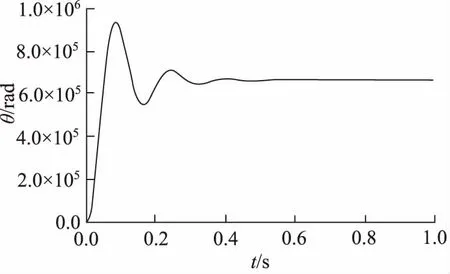
圖5 單位脈沖響應曲線
由圖5可知,該系統的單位脈沖響應曲線隨時間的推移呈欠阻尼震蕩并最終到達恒定值,究其原因,是因為當輸入信號為單位脈沖信號時,根據Laplase變換的終值定理,其穩態輸出值為:

=6.67×105
(9)
3.2 頻域分析
圖6和圖7為該系統開環傳遞函數的奈奎斯特圖和伯德圖,由圖6可知,系統開環奈奎斯特圖曲線按照逆時針方向包圍(-1,j0)點2圈,而系統開環傳遞函數在[s]右半平面沒有極點,根據奈奎斯特穩定性判據,可以判定該閥控液壓馬達角位移控制系統是閉環不穩定,開環穩定的。另外,由圖7可知,系統的幅值裕度Kg和相位裕度γ均為負值,同樣印證了系統閉環不穩定的結論。
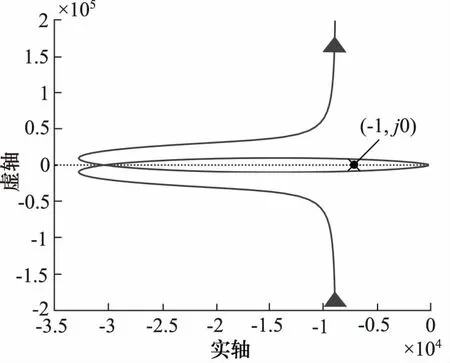
圖6 奈奎斯特圖

圖7 伯德圖
3.3 能控能觀性分析
系統的能控性與能觀性是實現狀態反饋控制的基礎,因此,需要結合閥控馬達系統的具體參數,對該系統的能控性與能觀性進行分析,該系統的狀態方程與輸出方程為:
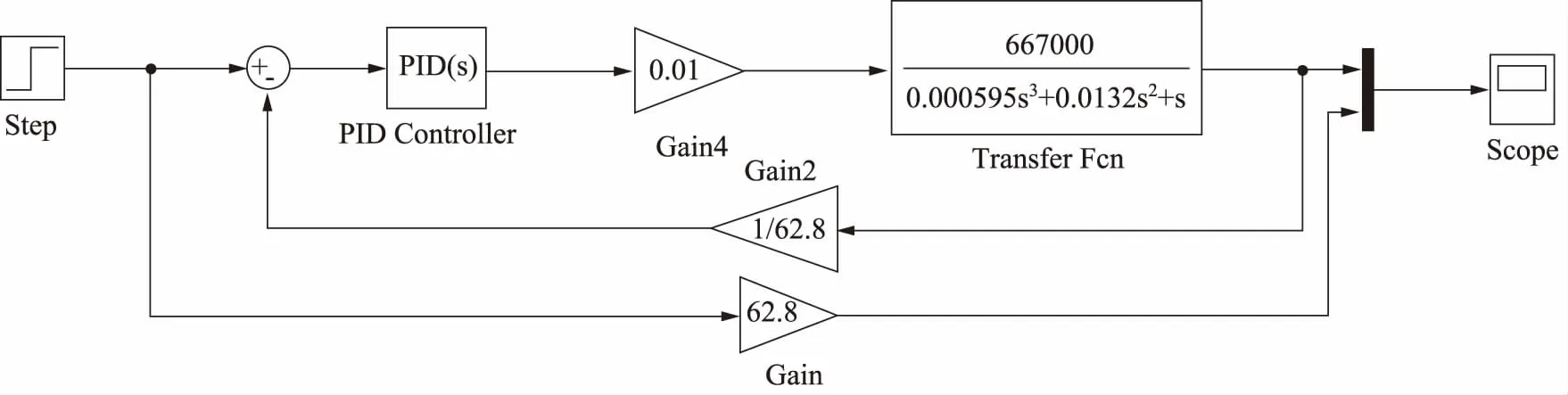
圖8 PID控制閉環仿真模型圖
(10)

(11)
(12)
由上述公式可知,該系統的能控性矩陣與能觀測性矩陣均滿秩,故該系統完全能控且能觀測,這為進行狀態反饋控制系統設計奠定了基礎。
4 閉環控制系統設計及對比分析
假設該閥控液壓馬達角位移控制系統的控制要求為:閥芯移動0.01 m,液壓馬達的輸出軸角位移在0.5 s內達到62.8 rad(20圈),超調量Mp小于5%,超調時間tp小于0.3 s,系統頻寬ωb小于50 rad/s,穩態誤差ep為0,分別采用PID、極點配置法和含有狀態觀測器的極點配置法設計閉環控制系統,并利用MATLAB/Simulink對3種方法的控制特性進行仿真分析與對比。
4.1 基于PID控制器的閉環控制系統設計
基于PID控制器的閥控液壓馬達角位移控制系統的基本原理為:輸入量與反饋量(輸出值)進行比較構成系統偏差,并通過PID控制器對系統的偏差進行調節,以使系統的輸出盡量接近期望值,在系統設計過程中,如何設置合理的PID調節參數(即比例、積分、微分系數)是影響系統控制性能的關鍵[14]。圖 8為基于PID控制器的閥控液壓馬達角位移閉環控制系統Simulink仿真模型。
4.2 基于極點配置法的狀態反饋控制系統設計
基于PID控制器的閉環系統設計屬于經典控制理論范疇,無法實現對閉環系統極點的任意配置,只有采取引入附加校正網絡,通過增加開環零極點的方法以變更軌跡走向,從而使系統極點落在指定的期望位置上,這樣增加了控制系統的難度。為克服這一缺點,基于現代控制理論的分析方法,在實現狀態反饋控制系統的基礎上,采用極點配置法,根據所期望的控制性能指標,直接對該系統極點位置進行配置。
該閥控液壓馬達角位移控制系統完全能控且能觀測的,其能控規范型為:

(13)
在確定了系統能控規范型的基礎上,需要根據所期望的控制性能指標以確定所希望的3個極點位置。選定s1和s2為1對主導極點,另外1個極點為遠極點。該系統的性能主要由主導極點s1,s2決定,遠極點的影響甚微。
首先需要確定主導極點位置,根據二階系統的性能指標關系式,系統超調量一般小于5%,可得:
(14)
式中,ξ為系統的阻尼比。
由式(14)可知,系統阻尼比ξ≥0.707。在工程中,二階系統阻尼比一般在0.4~0.8之間[15],故選取ξ為0.707。
由系統超調時間小于0.3 s,可得:
(15)
(16)
式中,ωn為系統的自振頻率。
此外,二階系統的頻寬ωb與自振頻率ωn有如下關系:

(17)
根據控制性能指標,系統頻寬ωb小于50,且系統阻尼比ξ選定為0.707,代入式(17)可得:系統自振頻率ωn≤50,這里取自振頻率ωn為50。至此,根據式(17)便可以得到該系統的主導極點為:
(18)
在此基礎上,選取遠極點為與原點距離遠大于5倍主導極點與原點距離的點,因此,選擇遠極點s3為-500。
由期望極點所構成的特征多項式為:
f*(s)=(s+500)(s2+70.72+2500)
=s3+570.72s2+37850s+1250000
(19)
結合原系統特征多項式,可得狀態反饋矩陣為:

(20)
至此,可以得到進行極點配置后的狀態反饋閉環系統的傳遞函數為:
式中,L為輸入放大系數。
由系統控制要求可知,系統穩態誤差為0,即:
(22)
將式(21)代入式(22)中,可得系統輸入放大系數L為0.07。在MATLAB/Simulink中建立基于極點配置法的狀態反饋閉環控制系統模型如圖9所示。
4.3 含有狀態觀測器的狀態反饋系統設計
采用極點配置法的閥控液壓馬達角位移控制系統是以狀態反饋為基礎的,然而,當系統所需反饋的狀態變量無法通過直接測量得到時,就需要構造狀態觀測器,以觀測器輸出的狀態來代替系統實際狀態,進行狀態反饋。為分析加入觀測器后對系統的影響,以閥控馬達角位移控制系統為例,建立含有狀態觀測器的狀態反饋閉環控制系統。
該系統完全能控且能觀測,故該系統及狀態觀測器的極點可以任意配置。含有狀態觀測器的極點配置法狀態反饋系統的控制性能與前文未加入時相同,故此時閉環系統的期望極點和狀態反饋矩陣不變,只需要對相應的狀態觀測器進行設計,設狀態觀測器的極點位置為s1,2,3=-500。
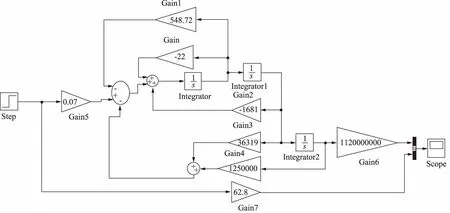
圖9 極點配置法狀態反饋閉環控制系統仿真模型
在設計狀態觀測器時,需要將系統轉化為能觀測規范型,所需變換矩陣T的計算方法為:
T=[T1,AT1,A2T1]
(23)

得到變換矩陣后,可得到系統能觀測規范型為:
(24)


(25)
狀態觀測器的特征多項式為:

(26)

(27)
給定系統的反饋矩陣G為:
(28)
狀態觀測器的狀態方程為:

(29)
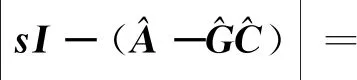
基于上述過程,在MATLAB/Simulink中搭建含有狀態觀測器的極點配置狀態反饋模型如圖10所示。
4.4 仿真對比
利用MATLAB/Simulink軟件對采用上述3種控制方法的閥控液壓馬達角位移控制系統特性進行仿真分析。其中,當采用PID閉環控制系統時,通過設置不同PID控制參數進行仿真對比,選擇較為合適的PID參數(Kp=0.4,Ki=0.001,Kd=0.0001);當采用基于極點配置法的狀態反饋控制系統時,各項參數均按照前文所得的計算結果進行設置,最終得到如圖11所示的階躍響應曲線。由圖可知,采用3種控制方法均能達到系統的控制要求,然而,當采用PID閉環控制系統時,系統響應較慢,約0.4 s左右才能達到期望輸出角位移,且存在明顯的震蕩;而采用極點配置法和含有狀態觀測器的極點配置狀態反饋控制系統響應速度較快,在0.2 s左右即可達到穩定的期望輸出角位移,且階躍響應曲線幾乎不存在震蕩。
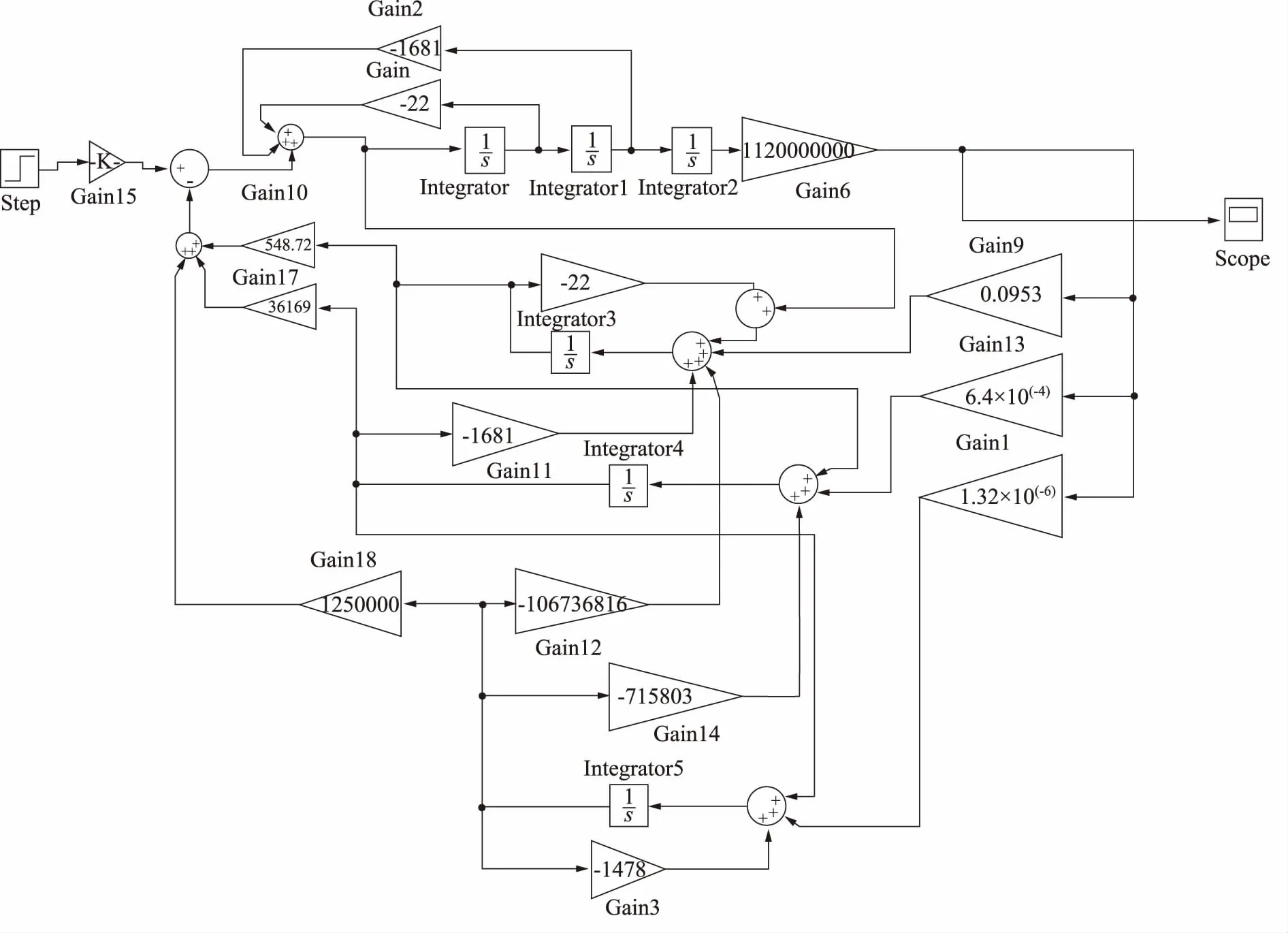
圖10 含有狀態觀測器的極點配置狀態反饋系統仿真模型
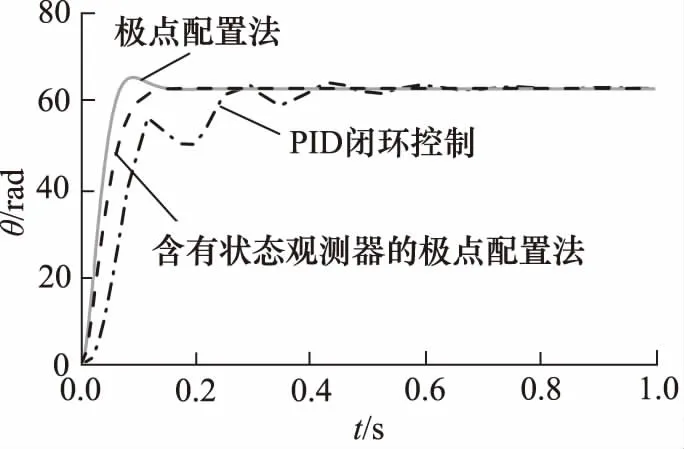
圖11 閥控馬達角位移控制系統階躍響應曲線
為探究狀態觀測器的極點位置對閥控液壓馬達角位移控制系統性能的影響,分別將狀態觀測器的極點s1,2,3配置到不同位置,建立相應的狀態反饋閉環控制系統模型,通過仿真進行對比分析。
圖12為將狀態觀測器極點分別配置到不同位置時,閥控液壓馬達角位移控制系統的階躍響應曲線,由圖可知,狀態觀測器極點位置會對系統輸出角位移控制特性產生影響,在一定范圍內,極點位置距離原點位置越遠,階躍響應曲線超調量越小(甚至無超調),但極點位置對階躍響應曲線的調整時間影響不大,輸出角位移均可在0.2 s左右達到穩定的期望輸出值。
圖12 狀態觀測器不同極點對應的階躍響應曲線
5 結論
本研究以某型閥控液壓馬達角位移控制系統為研究對象,分別基于PID閉環控制、極點配置法以及含有狀態觀測器的極點配置法對系統動態特性進行了對比研究,得出如下結論:
(1) 相對于PID閉環控制法,極點配置法在閥控液壓馬達角位移控制系統設計過程中更加靈活,可以根據期望的控制性能指標,實現系統極點的任意配置;
(2) 當采用含有狀態觀測器的極點配置法對狀態反饋閉環進行設計時,雖然狀態觀測器的極點可以任意配置,但其位置會對系統控制特性產生影響,隨著極點位置與原點之間距離的逐漸增大,系統超調量逐漸減小。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32