基于太陽角度的全自動海洋光譜采集控制系統研究
2020-06-12 04:37:46王章軍禹定峰蓋穎穎
海洋技術學報 2020年2期
楊 雷,王章軍,禹定峰,蓋穎穎,鄧 偉
(齊魯工業大學(山東省科學院)山東省科學院海洋儀器儀表研究所 山東省海洋監測儀器裝備技術重點實驗室國家海洋監測設備工程技術研究中心,山東 青島 266001)
隨著我國經濟社會的發展,海洋事業的發展越來越迅速,尤其是近些年來,針對海洋方面的研究取得了很多突破性的進展。海洋水色反演對于研究海洋科學有著基礎性的作用[1],尤其在海洋水體變化監測、海洋生態系統風險分析等方面起著不可替代的作用。通過傳統的光譜采集來反演海洋水色三要素[2],需要人工進行光譜的采集測量,但是人工控制光譜采集很難進行長時間的連續有效測量[3-4]。全自動的海洋光譜采集系統成為一個急需解決的問題。
要實現海洋光譜采集的全自動控制,就需要對太陽角度進行自動識別跟蹤,并調整儀器位置的功能。目前,對于太陽跟蹤的研究有很多,包括太陽方位自動跟蹤用于提升光伏發電效率[5]、太陽能集熱效率[6]等。在太陽光譜的自動跟蹤采集方面,李文偉等[7]做了太陽光譜輻照度儀自動跟蹤裝置的研究,陳曉寧等[8]進行了基于太陽跟蹤的自動光譜采集系統研制,但這些都只是局限于太陽光譜的采集。對于海洋光譜自動采集系統的研究,比較有代表性的產品包括:加拿大Satlantic公司設計的HyperSAS海面高光譜儀測量儀、上海奕楓儀器設備有限公司設計的水面高光譜輻射自動云臺測量系統[9]等。但這些系統并未實現海洋光譜采集的全自動化,無法根據太陽角度自動地調整儀器觀測平面的位置和探頭的指向角度。本文針對海洋光譜采集所存在的問題和已有海洋光譜自動采集系統所存在的不足進行了研究分析,設計實現了基于太陽角度變化實時調整儀器方位和探頭角度的控制系統,實現了海洋光譜采集的全自動控制。
1 系統的總體設計
全自動海洋光譜采集控制系統(圖1)主要包括數據采集接收模塊、太陽角度計算模塊、光纖探頭指向分析模塊、轉動控制模塊。

圖1 系統模塊示意圖
1.1 數據采集接收模塊
數據采集接收模塊(圖2)主要采集接收計算太陽角度所需要的信息,包括:(1)光譜采集位置的經度、緯度,光譜采集的日期、時間,這些所需要的位置及時間信息由GPS模塊提供;(2)光纖探頭所在儀器觀測平面的初始方位角,該角度信息由電子羅盤提供。數據采集接收模塊將接收到的這兩部分信息發送給太陽角度計算模塊。

圖2 數據采集接收模塊示意圖
1.2 太陽角度計算模塊
太陽角度計算模塊依據接收到的位置、時間和角度信息,進行實時的太陽角度計算,太陽角度的計算主要由PIC下位機控制系統和上位機系統實現完成,其計算流程如圖3所示。
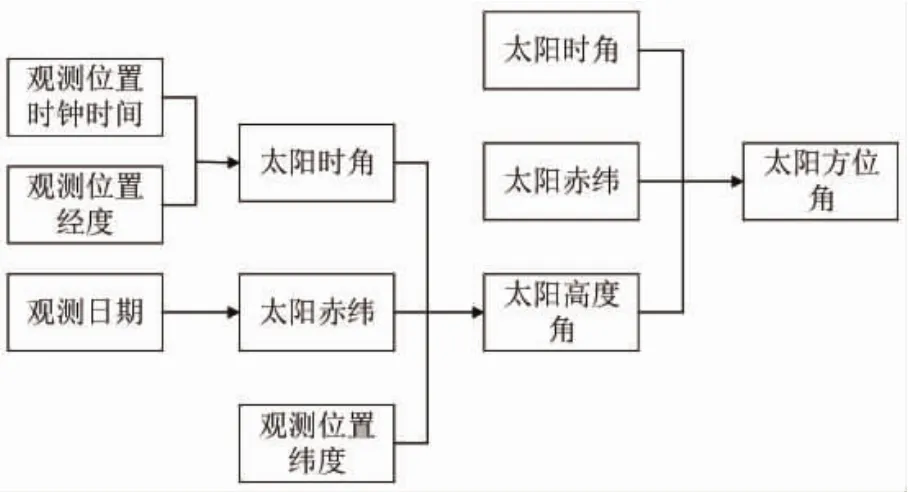
圖3 太陽角度計算流程圖
1.3 光纖探頭指向分析模塊
光纖探頭指向分析模塊根據計算得到的太陽角度進行指向分析,如圖4所示,ABCD平面為儀器所在的觀測平面,EFGH平面為太陽光的入射平面。在進行測量觀測時一般要求儀器觀測平面與太陽入射平面夾角為135°左右,即∠COH=135°,在進行光譜采集時,光纖探頭依次需要采集天空光的下行輻亮度、水體的上行輻亮度和參考板的上行輻亮度[10-11]。如圖4所示,AO為測量參考板上行輻亮度時光纖探頭的指向;AW為測量水體上行輻亮度時光纖探頭的指向;AK為測量天空光下行輻亮度時光纖探頭的指向;AK位于ABCD平面內。其中∠CAO和∠CAW均位于30°~60°之間。這樣設置觀測角度可以很好地避免太陽直射和反射的影響,避免采集的光譜出現飽和的情況[11-12]。
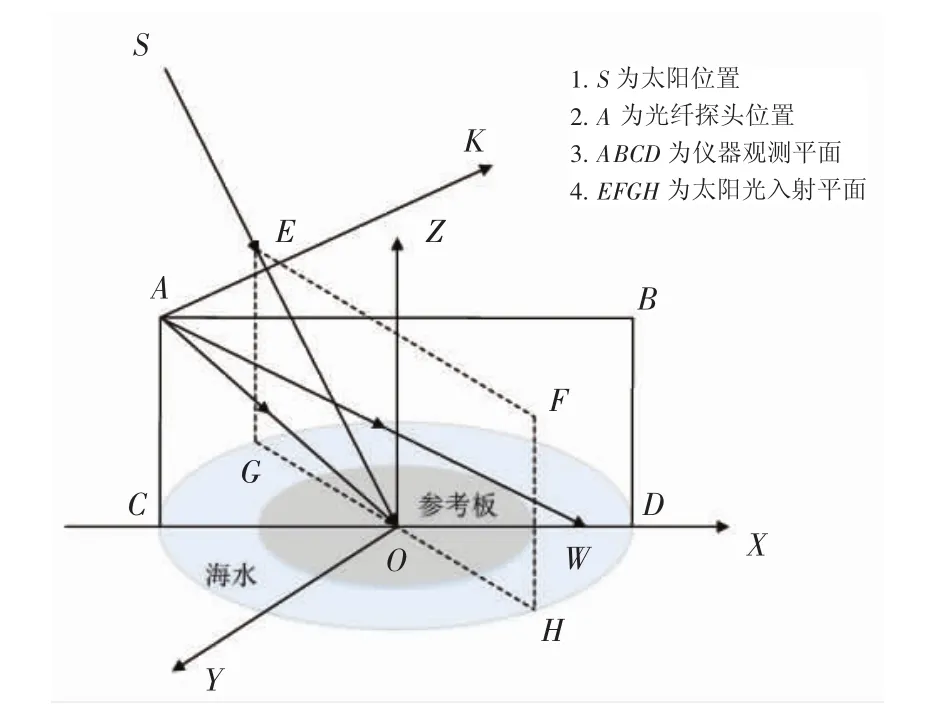
圖4 水體光譜觀測幾何要求示意圖
1.4 轉動控制模塊
轉動控制模塊依據分析得到的結果,向步進電機發送轉動指令,控制步進電機旋轉對應的角度值,使得儀器觀測平面到達要求的觀測位置,同時控制光纖舵機指向天空、海表面、參考板的所需角度進行光譜數據的采集測量。
2 太陽角度計算過程
2.1 太陽時角的計算
由于我國的時鐘時間都是執行的北京時間,即東八區時間,而實際的當地時間即真太陽時并非所用時鐘的北京時間,因此在進行太陽方位角計算時,首先要進行所在地理位置的真太陽時的計算,計算公式如下[13]:

式中:Tclock為所在位置的時鐘時間;Le為所在位置的經度。計算得到真太陽時后,便可根據計算得到的真太陽時來計算所在位置的當前太陽時角。

2.2 太陽赤緯的計算
太陽赤緯即太陽直射點的緯度值,其值的大小變化主要由日期決定,太陽赤緯的計算根據所要求的計算精度不同有著很多的計算方法,這里參照參考文獻[13]中的研究結果,采用所有太陽赤緯計算中精度較高的Bourges算法來計算太陽赤緯角,如下式所示:
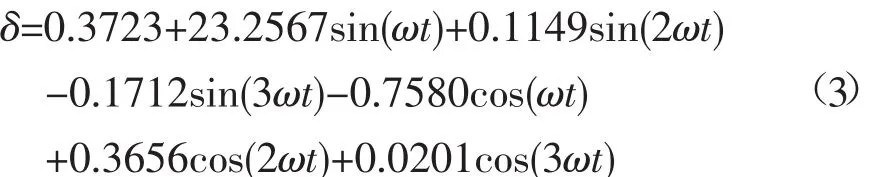
其中:
式(5)中:dn值為所要計算日期在當年的第幾天,即平年 dn值為 1~365,閏年 dn值為 1~366。
2.3 太陽高度角的計算
對于某個觀測位置的太陽高度角指的是所在位置太陽光線與通過該位置與地心相連的地表切面的夾角[10]。觀測位置確定后,影響太陽高度角大小的主要是時間,一天當中日出和日落的時候太陽高度角最小為0°,正午時分太陽高度角最大為90°。因此,計算太陽高度角需要觀測地的地理緯度信息、根據日期計算得到的太陽赤緯信息和根據當天時間計算得到的太陽時角信息,計算公式如下所示[14]:

式中:Ll為所在觀測位置的地理緯度信息。
2.4 太陽方位角的計算
太陽方位角指的是太陽光的入射方向與地平面之間的夾角,通常也被定義為以目標物的北方向為起始方向,以太陽光的入射方向為終止方向,按順時針方向所測量的角度[14]。本文中,為了計算時的區分方便,以目標物的正南方向為起始方向,當上午時太陽方位為南偏東,此時太陽方位角即為負的該角度值。當下午時太陽方位為南偏西,此時太陽方位角即為正的該角度值[15-16]。

3 中國近海海域太陽方位角變化分析
本系統主要用于實現采集海洋光譜信息的全自動化,利用所得到的光譜信息反演水色三要素的值,以應用于海洋環境監測、海洋水文分析等方面。而遠海大洋的Ⅰ類水體中水色三要素的含量相對較少且短時內相對穩定,對其研究的意義相對小于光學復雜的近岸Ⅱ類水體。該系統大多應用于近海的Ⅱ類水體的光譜采集工作,因此這里針對中國近海海域進行太陽方位角變化的分析。
3.1 不同海域太陽方位角變化分析
分別在渤海、黃海、東海、南海海域選取4個觀測點,觀測點的經緯度信息如表1所示。
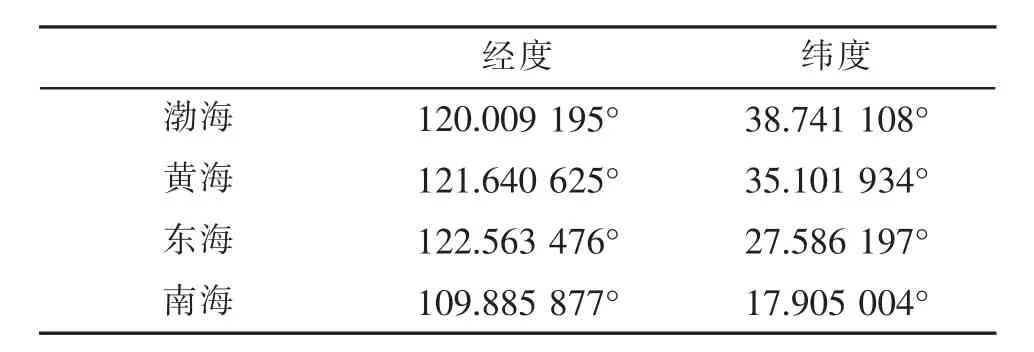
表1 4個觀測點的經緯度信息
觀測日期為2019年9月1號,觀測時間為系統進行海洋光譜采集的時間,即9:00 AM-4:00 PM,在上述條件下對4個不同海域的觀測點進行1 d的太陽方位角仿真分析,分析得到仿真結果,如圖5所示。
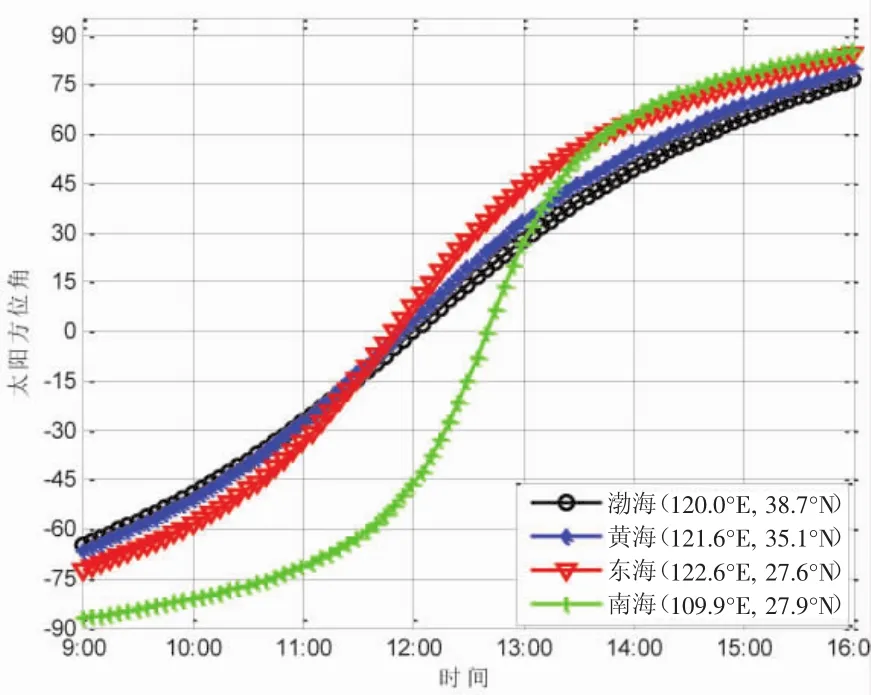
圖5 不同海域太陽方位角隨時間的變化趨勢
從圖5可以看出,同一天的相同觀測時間內,不同海域的太陽方位角隨時間變化趨勢并不相同,渤海和黃海海域地理位置相近,地理緯度最高,太陽方位角變化趨勢也十分接近,比較接近線性,南海海域與另外3個海域相比變化差異最大,地理緯度最低,太陽方位角變化的線性趨勢也最差。4個觀測海域中太陽方位角到達零度即正南方位的時間從圖中可以看出,由早到晚依次是東海、黃海、渤海和南海,也正是4個觀測點經度由高到低的順序。
為了更好地分析經緯度不同對太陽方位角變化趨勢的影響,分別設定緯度相同、經度不同的4個仿真分析觀測點和經度相同、緯度不同的4個仿真分析觀測點,進行太陽方位角變化趨勢的仿真分析,觀測點的經緯度信息分別如表2~表3所示。
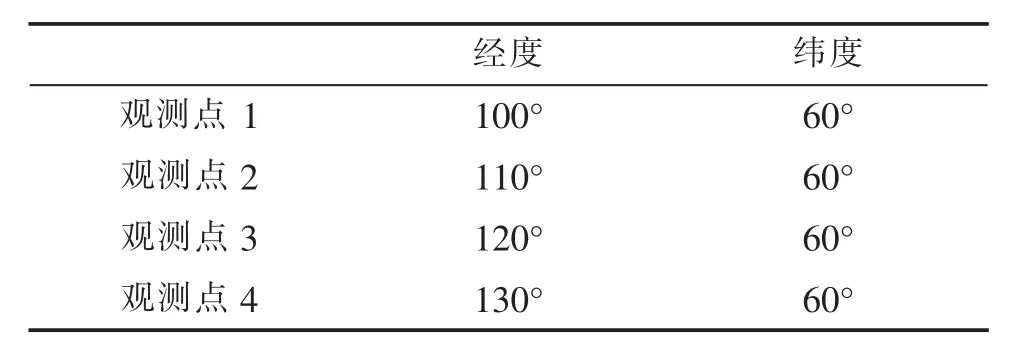
表2 4個觀測點的經緯度信息(緯度相同)
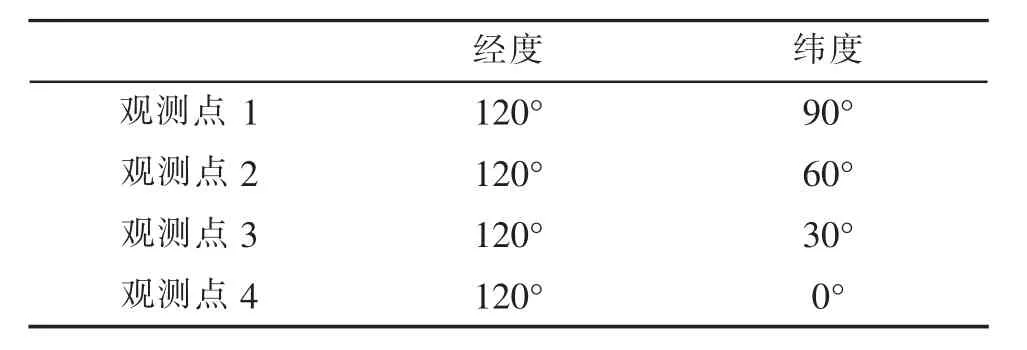
表3 4個觀測點的經緯度信息(經度相同)
仿真的觀測時間設置為9月1日9:00 AM-3:00 PM,仿真結果如圖6~圖7所示。
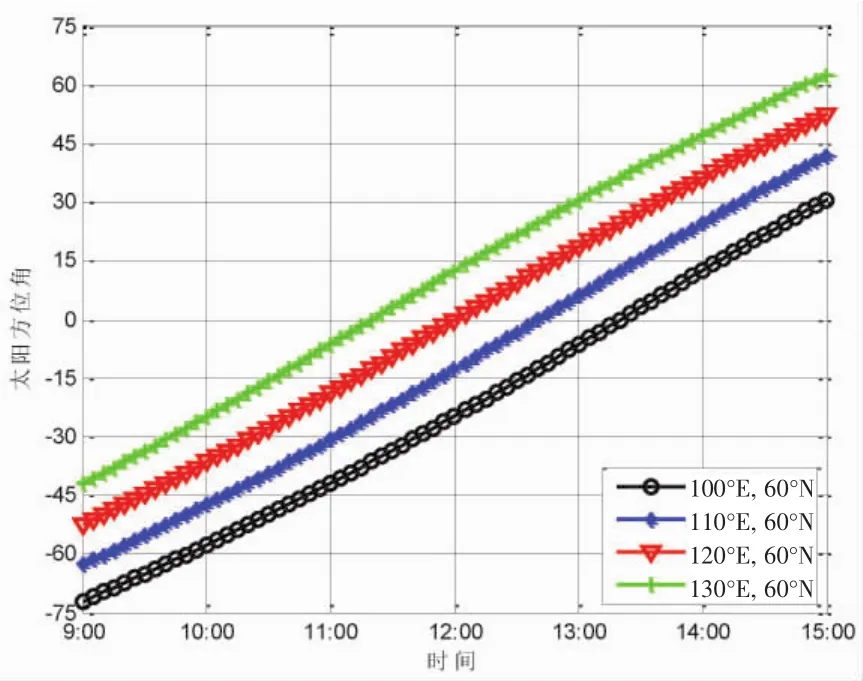
圖6 相同緯度不同經度太陽方位角隨時間的變化趨勢
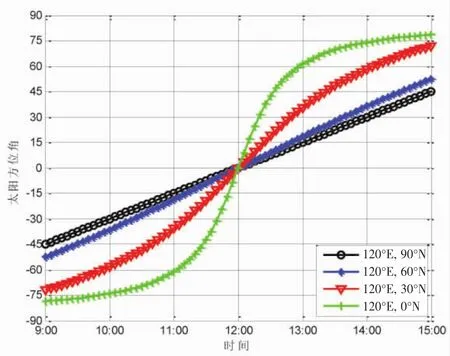
圖7 相同經度不同緯度太陽方位角隨時間的變化趨勢
通過上述仿真結果分析可以得出,相同緯度情況下,隨著經度的變化,太陽方位角的變化趨勢不變,不同經度之間只存在著提前或者延時到達同一太陽方位角的情況,經度越低,延時時間越長。相同經度情況下,隨著緯度的變化,太陽方位角的變化趨勢會出現不同,緯度越高,一天中太陽方位角的變化趨勢越接近線性;緯度越低,太陽方位角變化的線性趨勢越差,在低緯度情況下,越接近中午時分太陽方位角變化越快,越接近早晚時分太陽方位角的變化越慢。
3.2 不同季節太陽方位角變化分析
對渤海的觀測點位分別在一年中不同季節進行太陽方位角變化的仿真分析,分別選取2019年3月22日、6月22日、9月22日、12月22日代表春季、夏季、秋季、冬季進行觀測,得到的仿真結果如圖8所示。
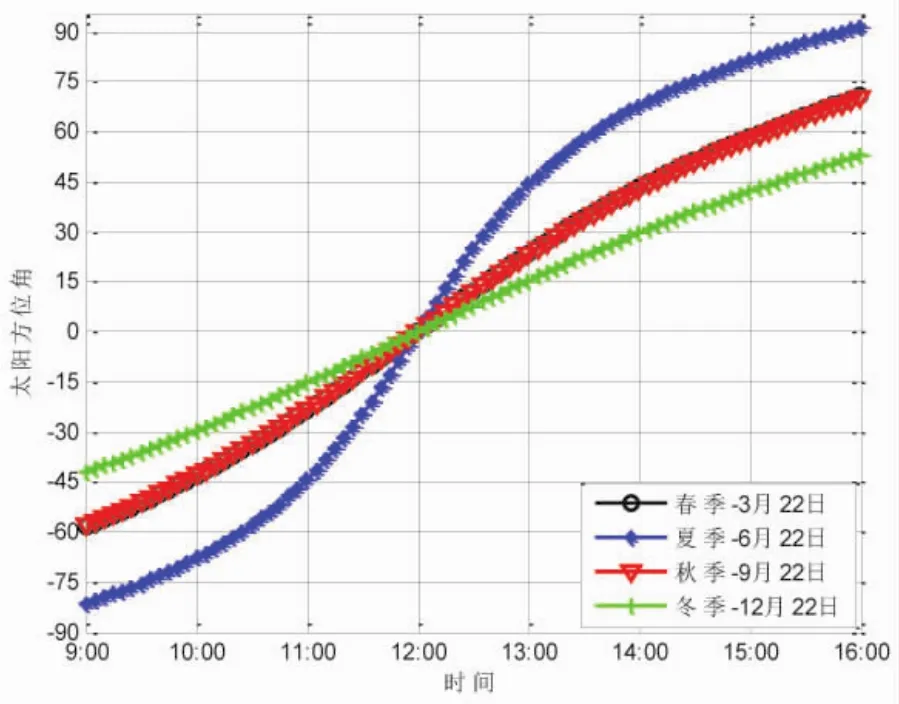
圖8 不同季節渤海海域太陽方位角隨時間變化趨勢
從圖8可以看出,渤海海域春季和秋季一天中太陽方位角的變化趨勢基本相同,冬季太陽方位角的變化最接近線性,夏季時太陽方位角變化的線性趨勢較差。季節對于太陽方位角變化趨勢的影響與緯度相同,不同的季節太陽直射點緯度不同,冬季的冬至日時太陽直射南回歸線,夏季的夏至日時太陽直射北回歸線。對于固定的同一觀測點,不同的季節觀測點緯度距離太陽直射緯度的緯度差值不同,由于觀測點位于北半球的渤海海域,冬季時緯度差值最大,觀測點與直射點的距離最大,夏季時緯度差值最小,觀測點與直射點的距離最小。這一結果也與3.1小節中分析的“相同經度情況下,緯度越高太陽方位角變化趨勢越接近線性,緯度越低太陽方位角變化的線性趨勢越差”相一致。
依據仿真分析得到的太陽方位角變化規律可以對系統的方位角調整進行有側重的設置。當觀測位置位于高緯度海域或者是觀測季節為夏季時,早晚時分太陽方位角的變化很慢,中午時分太陽方位角變化很快,此時可以調整系統控制,早晚時每間隔較長時間調整一次系統角度,中午時間隔較短時間調整一次系統角度。這樣既可以保證角度調整的準確性和精度,又可以節省早晚時分系統調整次數過多的功耗。當觀測位置位于低緯度海域或者觀測季節為冬季時,太陽方位角變化基本趨于線性,相同時間內太陽方位角的變化值相同,可以設置系統的調整角度值為固定值,免去系統的計算過程,提高了系統的調整效率。
4 系統功能實現
觀測系統結構示意圖如圖9所示。轉臺電機根據光纖探頭指向分析模塊發來的信息,實時地控制觀測儀器轉動,保證光纖探頭所在的觀測平面滿足圖4所示的要求。轉臺電機控制觀測儀器到達觀測平面后,光纖舵機控制光纖探頭進行轉動,依據圖4所示的角度要求,控制探頭分別指向天空、海水、參考板采集所需要的光譜信息。
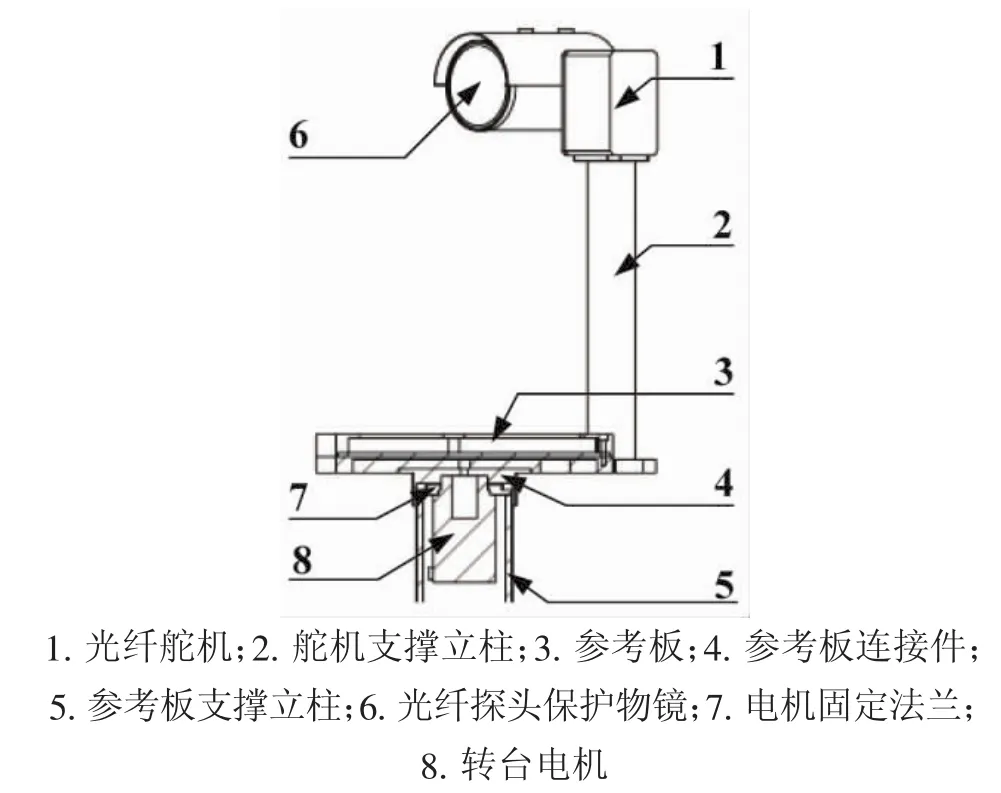
圖9 觀測系統結構示意圖
控制系統中的數據接收、太陽方位角計算、光纖探頭指向分析部分集成于參考板支撐立柱下方的機箱內,通過485控制線、轉臺電機控制線、光纖與觀測系統相連。控制系統依據接收到的時間、位置、角度信息實時地向轉臺電機和光纖舵機發送對應的角度信息,光纖探頭采集到的光譜信息通過光纖傳送給控制系統,全自動地實現光譜的采集工作。
系統全自動進行光譜采集的詳細工作流程:
(1)PIC18控制器芯片通過485通信實時地接收來自羅盤的方位信息(儀器觀測平面與正南方向的角度差值信息)和GPS的位置信息(經度、緯度信息),并通過串口通信將其發送給上位機系統。
(2)上位機系統接收到來自PIC18下位機系統傳輸的經緯度信息并讀取系統的時間信息(年、月、日、時、分、秒),并依據章節2中的太陽角度計算流程,實時計算太陽的高度角和方位角。
(3)上位機系統依據接收到的羅盤方位信息確定正南所在的方向(即太陽方位角的零度所在方向),依據1.3節中的觀測幾何要求,即儀器觀測平面與太陽入射平面夾角為135°左右,以及步驟(2)中計算所得的太陽方位角來確定當前儀器觀測平面所需調整的角度值,并將該角度值發送給PIC18下位機系統。
(4)通過串口通信PIC18下位機系統接收到所需調整的角度值后,產生轉動該角度值所需的PWM波控制信號并發送給圖9中的轉臺電機,驅動轉臺電機轉動控制儀器觀測平面到達所要求的位置。
(5)上位機系統依據計算得到的太陽高度角和1.3節中的觀測幾何要求,分析計算得到光纖探頭指向天空、海面、參考板時光纖舵機所需轉動的3個角度值,并通過串口通信依次將這3個角度值發送給PIC18下位機系統。
(6)上位機系統給PIC18下位機系統發送3個角度值的過程:發送時先發送指向天空的角度值,發送后等待2 s(以等待下位機控制系統控制光纖探頭轉動并完成光譜信息采集),然后發送指向海面的角度值,再次等待2 s后,最后發送指向參考板的角度值。
(7)PIC18下位機系統通過串口通信接收到第一個角度值后,發送轉動至該角度值的控制指令給光纖舵機,控制光纖探頭轉動指向天空,采集天空光的光譜數據,之后接收到第二個、第三個角度值后,分別控制光纖探頭指向海面和參考板,采集海面和參考板的光譜數據。
系統在2019年6月搭載于“東方紅3號”科考船上,進行了為期1個月的海上應用示范。本次系統搭載實驗于5月31日開始,從上海江南造船廠碼頭出發,經過東海海域,于6月2日到達廈門近海船舶停靠錨地,補給后當天出發前往南海實驗海域,并在南海實驗海域進行相關實驗,于6月8日出發返回廈門近海船舶停靠錨地,6月9日進行相關補給后,再次出發前往南海實驗海域,并于6月19日返回廈門近海船舶停靠錨地,補給后再次前往南海實驗海域,最終于6月30日返航廈門現代碼頭。詳細的航線軌跡如圖10所示,圖中實心圓點為科考船停靠的作業試驗位置。
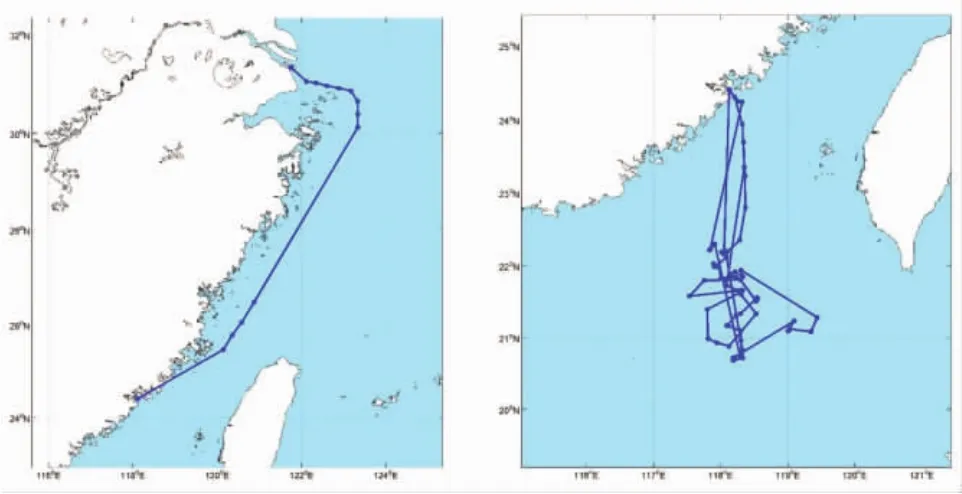
圖10 科考船停靠站位及航線區域示意圖
在為期1個月的海試過程中,系統穩定可靠地實現了光譜的全自動采集工作,圖11~圖13所示為選取的6月9日13:40-14:40的時間內系統全自動連續采集的天空光、參考板和海面的光譜曲線。
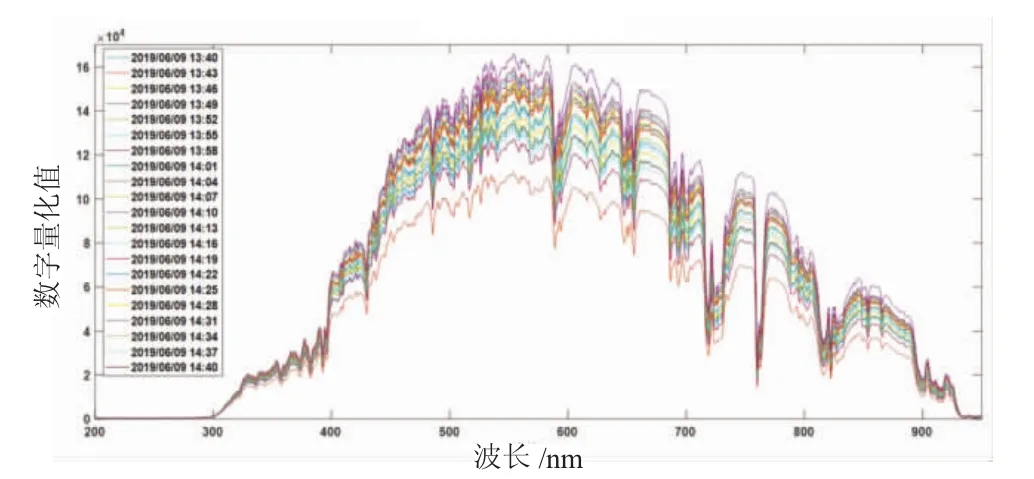
圖11 天空光光譜數據曲線
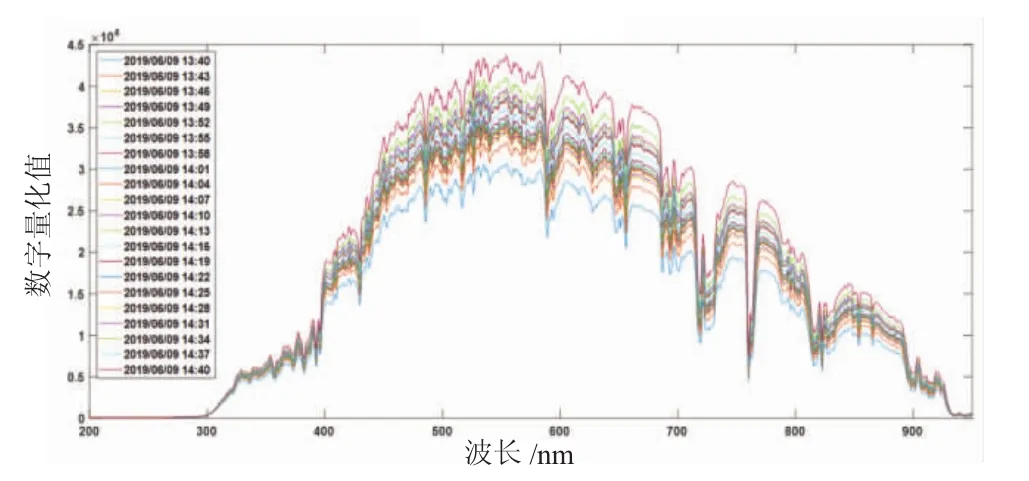
圖12 參考板光譜數據曲線
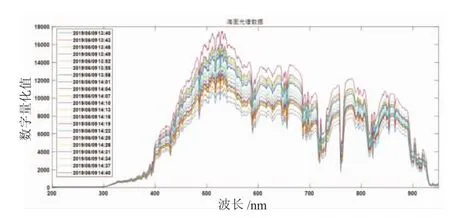
圖13 海面光譜數據曲線
從圖11~圖13中可看出,系統全自動控制采集的光譜數據的光譜強度由強到弱依次為天空、參考板、海面,這符合實際情況,光譜曲線的變化趨勢也與實際相符,通過系統全自動控制采集得到的光譜數據與人工測量采集得到的光譜數據基本一致。通過光譜曲線的分析對比可以得出,系統的全自動光譜采集準確、穩定、可靠,可以替代人工進行光譜采集,滿足實際需求。
5 結論
基于太陽角度的全自動海洋光譜采集控制系統實現了光譜采集的全自動無人值守狀態,極大地節省了人力成本,同時也解決了人工測量光譜不連續、數據量小、覆蓋海域小等問題,實現了船載海洋光譜儀對搭載船只航行海域光譜連續觀測的功能。同時,對于太陽角度的實時精準計算分析能夠很好地滿足光譜測量對于儀器所在觀測平面、觀測角度的要求,保證了系統全自動采集的光譜數據準確可靠,可以替代人工完成光譜采集工作,并能夠準確無誤地采集到海洋水色反演所需要的光譜信息。