可持續性渦旋的產生與測量
2020-06-11 07:18:48郭瑞雪王鵬程周司維林漫鈴
物理實驗 2020年5期
關鍵詞:實驗
郭瑞雪,王鵬程,周司維,林漫鈴,陳 倩
(華南師范大學 物理與電信工程學院,廣東 廣州 510006)
在日常生活中,渦旋移動是流體運動常見形式之一,因此在流體力學中關于渦旋運動的研究是重要部分. 在近代流體力學史上,歐拉的理想流體運動基本方程是建立在忽略流體黏性的基礎上,1857年赫姆霍茲在歐拉提出的微團繞著某一軸以同樣的角速度旋轉的背景下對流體渦旋作出開創性的研究,采用類似于電流的電磁相互作用的方法來研究流體運動,首次解決了流體渦旋中流體的不可壓縮、無黏性流體的問題[1]. 開爾文受到了赫姆霍茲的啟發,更加深入地對流體渦旋進行了研究,提出了開爾文定理. Bjerkens將赫姆霍茲和開爾文的理論推廣到大氣和海洋運動中. 1911年馮卡門發現卡門渦街現象. 目前流體渦旋仍然是當代流體力學研究的熱點. 本文借助粒子圖像測速(Particle image velocimetry,PIV)技術將渦旋可視化,利用單片機實現了對渦旋速度的控制. 利用雙激光設備追蹤直徑為30 μm的示蹤粒子,在設備上顯示出示蹤粒子的運動軌跡、速度、渦度等.
1 實驗原理
1.1 電機轉動產生渦旋的原理
電機的轉動產生渦旋可近似為蘭金渦的模型,電機是半徑為R的有限長的圓柱形,流體像剛體一樣繞其軸線轉動,角速度為ω[2]. 電機轉動時使得附近的流體受到與表面相切的切向力,同時體積力不能表示為勢函數的梯度,由于流體受到慣性影響,并且由于水缸有邊界,因此產生了渦量源,形成渦旋[3],渦旋模型圖如圖1所示.

圖1 渦旋模型圖
1.2 渦旋的理論分析結果
根據畢奧-薩伐爾定理,可以由已知漩渦場確定速度場,其中由渦絲引起的速度稱為旋渦誘導速度場,如圖2可得,微元渦絲ds在P點誘導速度為
其中r為旋渦強度.
當為無限長直渦絲時,
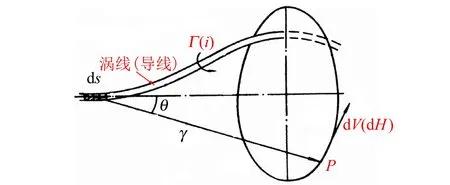
圖2 誘導速度分析圖
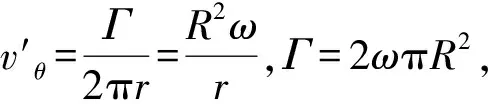
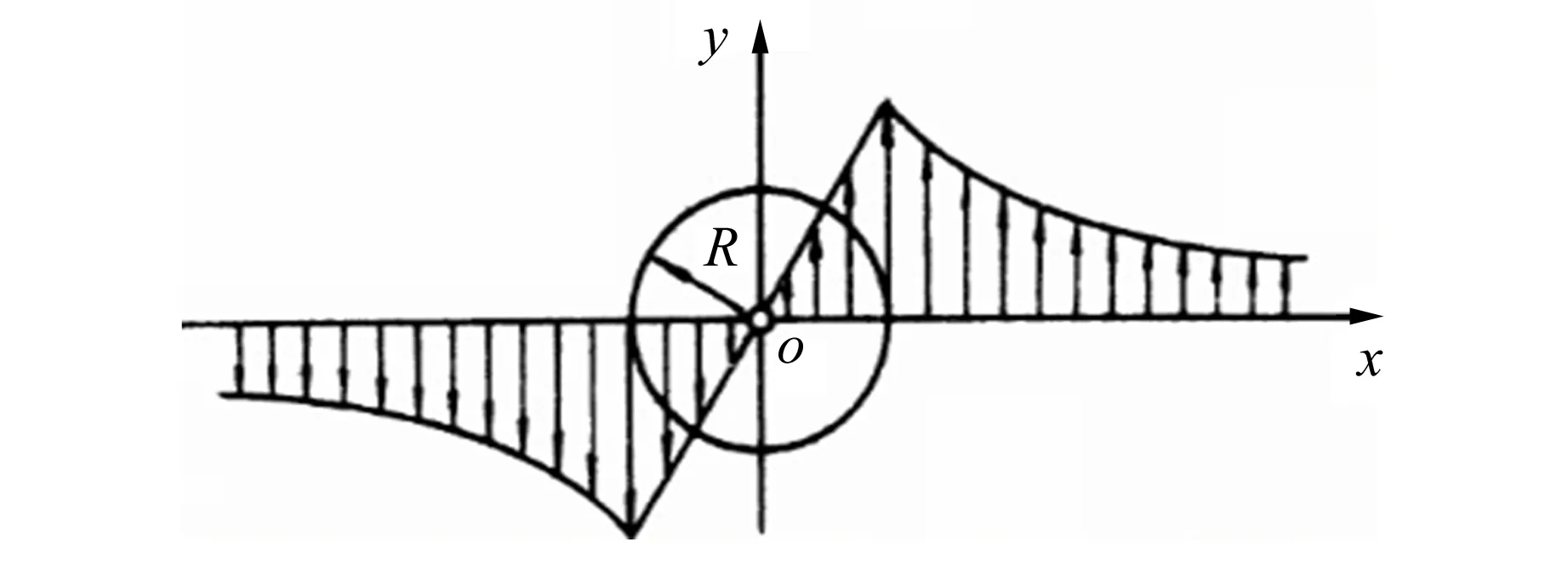
圖3 速度分布圖
由于渦度是矢量,其定義為速度的旋度,用ω表示,ω=rotV=×V,根據速度圖可得渦度分布如圖4所示.
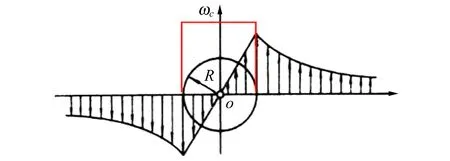
圖4 渦度分布圖
1.3 PIV技術原理
PIV技術是除向流場散布示蹤粒子外,所有測量裝置(見圖5)并不介入流場,并利用CCD高速相機進行拍攝,通過分析采集圖像得出流場信息的技術[4]. PIV法測速是通過測量示蹤粒子在已知很短時間間隔內的位移來間接地測量流場的瞬態速度分布[5]. 由于實驗電機轉速快,很難測量實時數據,因此采用PIV技術. PIV技術對示蹤粒子有要求,示蹤粒子需要有足夠高的流動跟隨性,示蹤粒子的運動才能夠真實地反映流場的運動狀態. 因此示蹤粒子在PIV測速法中非常重要. 在PIV測速技術中,高質量的示蹤粒子要求為:1)比重要盡可能與實驗流體相一致;2)足夠小的尺度;3)形狀要盡可能圓且大小分布盡可能均勻;4)有足夠高的光散射效率. 實驗采用的玻璃砂符合示蹤粒子的要求[6-7].
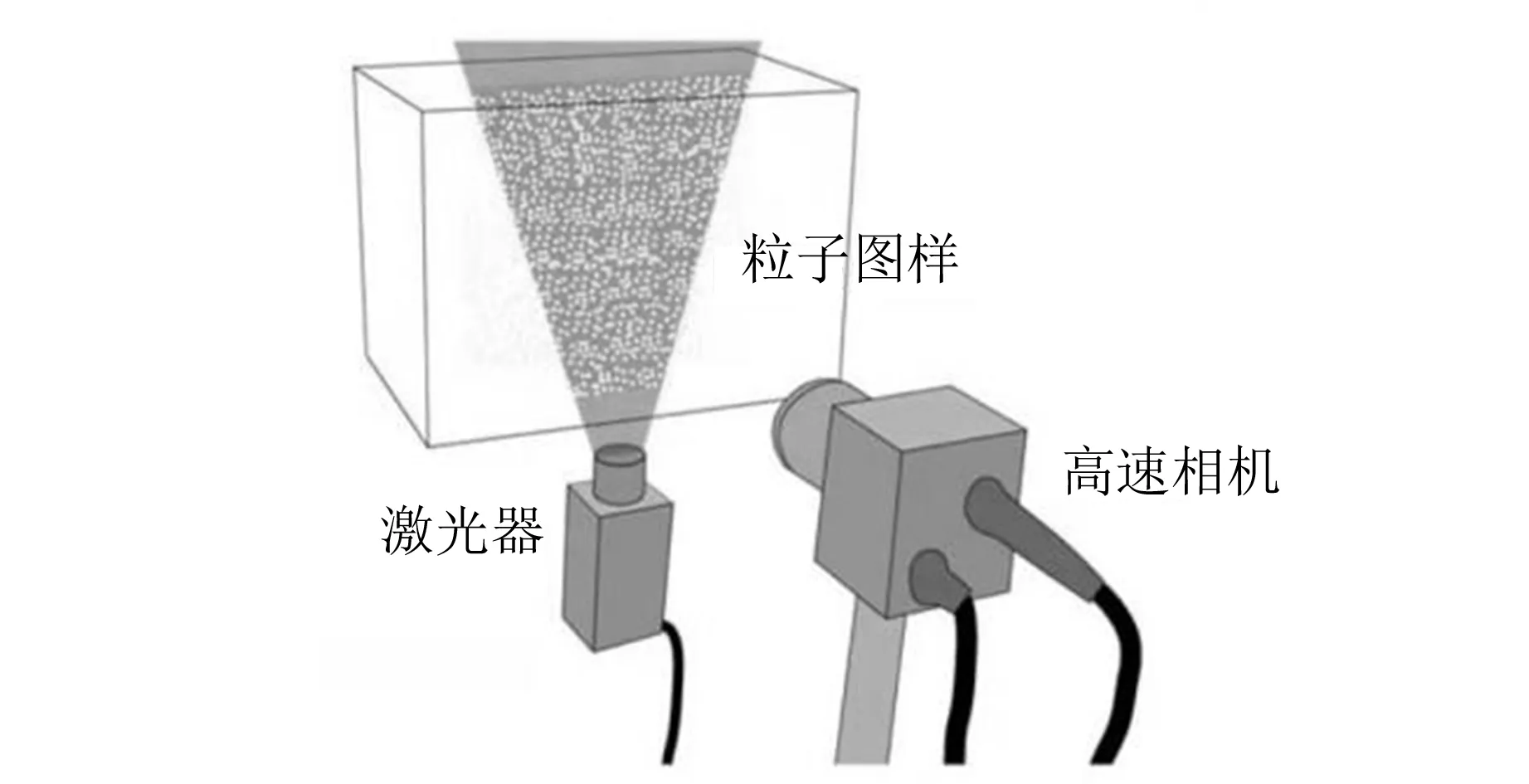
圖5 PIV裝置圖
1.4 直流電機控制原理
直流電機是根據通電導體在磁場中會受力的原理工作的,只要控制電壓就比較容易控制速度,直流電機占空比示意圖見圖6. 通過電力電子線路(各種晶體管、MOS管等)控制電機的供電電壓頻繁導通,形成脈沖寬度調制(Pulse width modulation,PWM)以控制電機的轉速,假設PWM的頻率不變,只改變PWM的占空比,當PWM的占空比減小時,則輸出電壓的有效值就減小,即電機轉速減慢,反之就增快. 實驗采用的直流電機占空比為0%~100%,通過按鍵控制占空比的比值可以調節電機轉速.

圖6 直流電機占空比示意圖
2 實驗方法
2.1 實驗器材
發生裝置所用器材:矩形玻璃水箱0.6 m×0.4 m×0.4 m、壁厚0.8 cm(1個),水下電機馬達(1個),扇葉(3個,半徑分別為3 cm,4 cm,5 cm),STC89C52單片機開發板(1個).
測量裝置所用器材:波長為650 nm、功率為200 mW的激光源(2個),10 cm×10 cm可調節升降平臺(2個),直徑為45 μm的玻璃砂(若干),CCD攝像機(1臺),直線導軌滑軌(2條).
2.2 實驗裝置
在玻璃水箱底部距離長邊約12 cm處平行于長邊放置可移動導軌,在導軌上固定電機馬達. 電機通過杜邦線與水箱外的單片機相連[8]. 水箱上方平行于水下導軌放置導軌,在導軌上固定CCD相機,調節使CCD相機垂直于扇葉正上方. CCD相機與筆記本電腦相連,由筆記本電腦控制CCD相機拍攝[9-10]. 2個線激光器置于可調節高度的水平升降臺上,2個激光器等高且照射面與水面平齊. 實驗裝置示意圖如圖7所示.
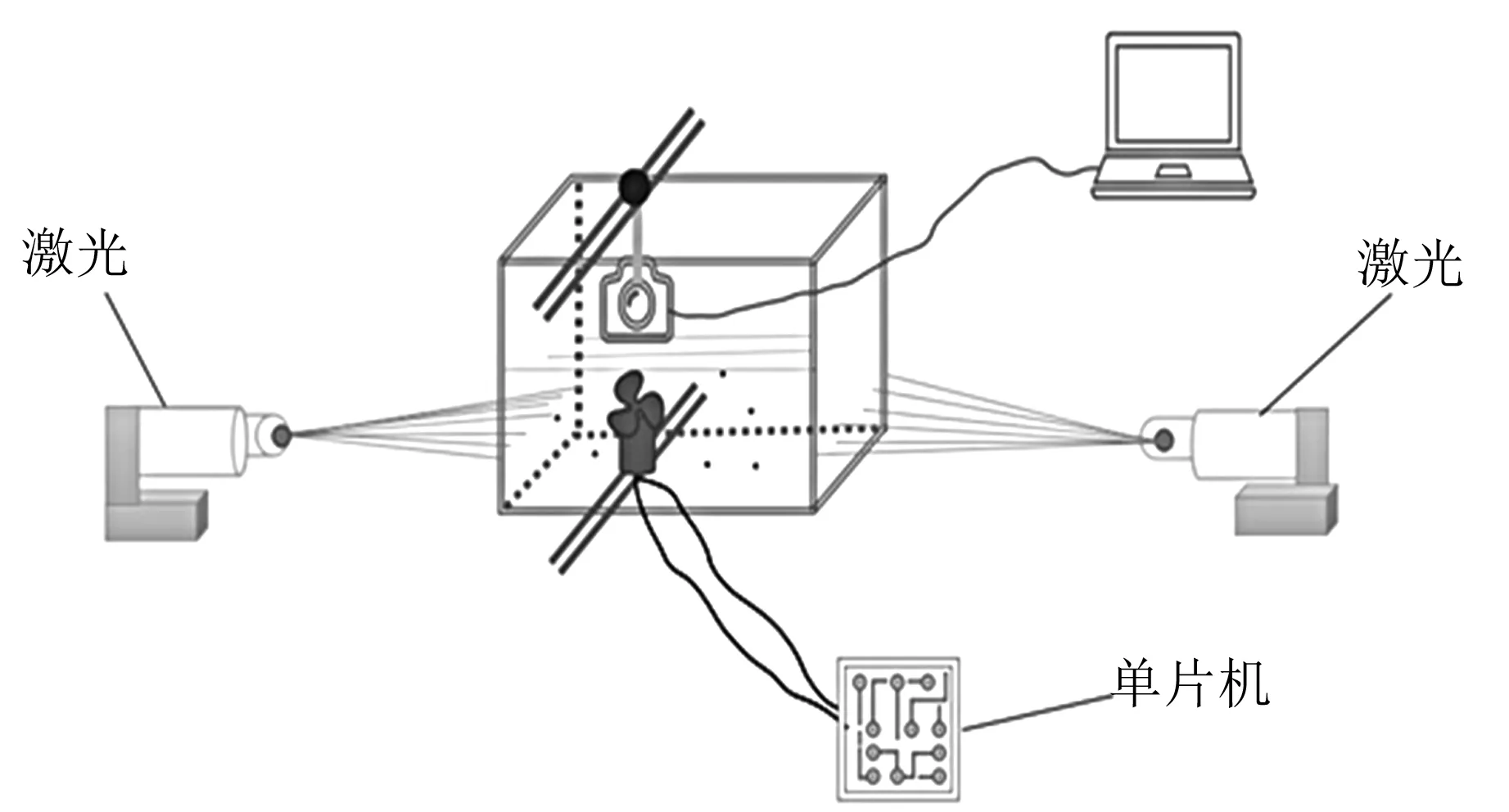
圖7 實驗裝置圖
2.3 實驗步驟
1)調節水面高度:向水缸中注入清水,為了使渦旋結構清晰、便于數據提取,調節水面高度為14.5 cm.
2)加入適量示蹤粒子:向水中加入直徑約為45 μm的玻璃砂作為示蹤粒子.
3)調節電機速度:實驗表明選取半徑為4 cm的扇葉,PWM占空比為88%時產生的渦旋效果明顯且較為穩定. 故打開電機電源,用單片機調節電機至占空比為88%下的轉速.
4)調節激光器的位置:調節2個激光器水平,同時調整升降平臺使激光的高度與水面平齊.
5)獲取實驗數據:CCD相機拍下示蹤粒子分布圖的圖像序列,用PIV Lab分析渦旋的速度和渦度分布,得到速度和渦度曲線圖[11].
3 實驗結果與分析
3.1 處理環境和實驗條件
3.1.1 處理環境
1)Matlab版本:2017b.
2)PIV處理軟件:Thielicke, W. & Stamhuis, E.J. (2014): PIVlab - Time-Resolved Digital Particle Image Velocimetry Tool for Matlab (version: 2.02).
3)電機工作時,電壓為12 V.
3.1.2 實驗條件
實驗發現,當扇葉半徑為4 cm,占空比為88%時,渦旋處理效果最為顯著并且實驗數據更為穩定可靠. 于是設置扇葉半徑為3 cm,4 cm,5 cm進行實驗,并選取效果最好的扇葉半徑進行占空比為80%,88%,96%的對比實驗[12].
3.2 實驗結果處理分析
以扇葉半徑為4 cm,占空比88%為例進行數據分析.
1)采集到極短時間間隔內2幀示蹤粒子分布圖[13],如圖8所示.
(a) 前一幀
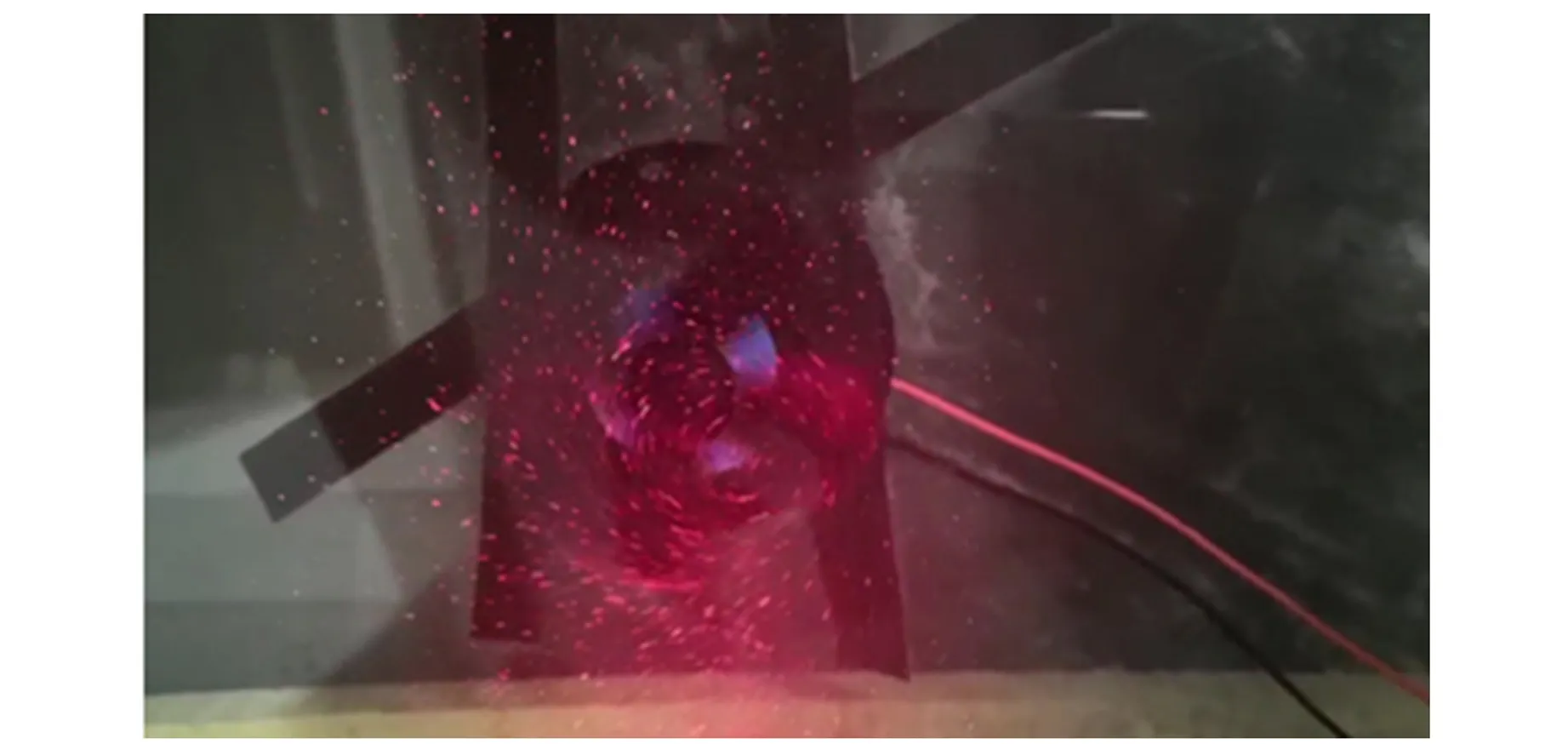
(b)后一幀圖8 示蹤粒子分布圖
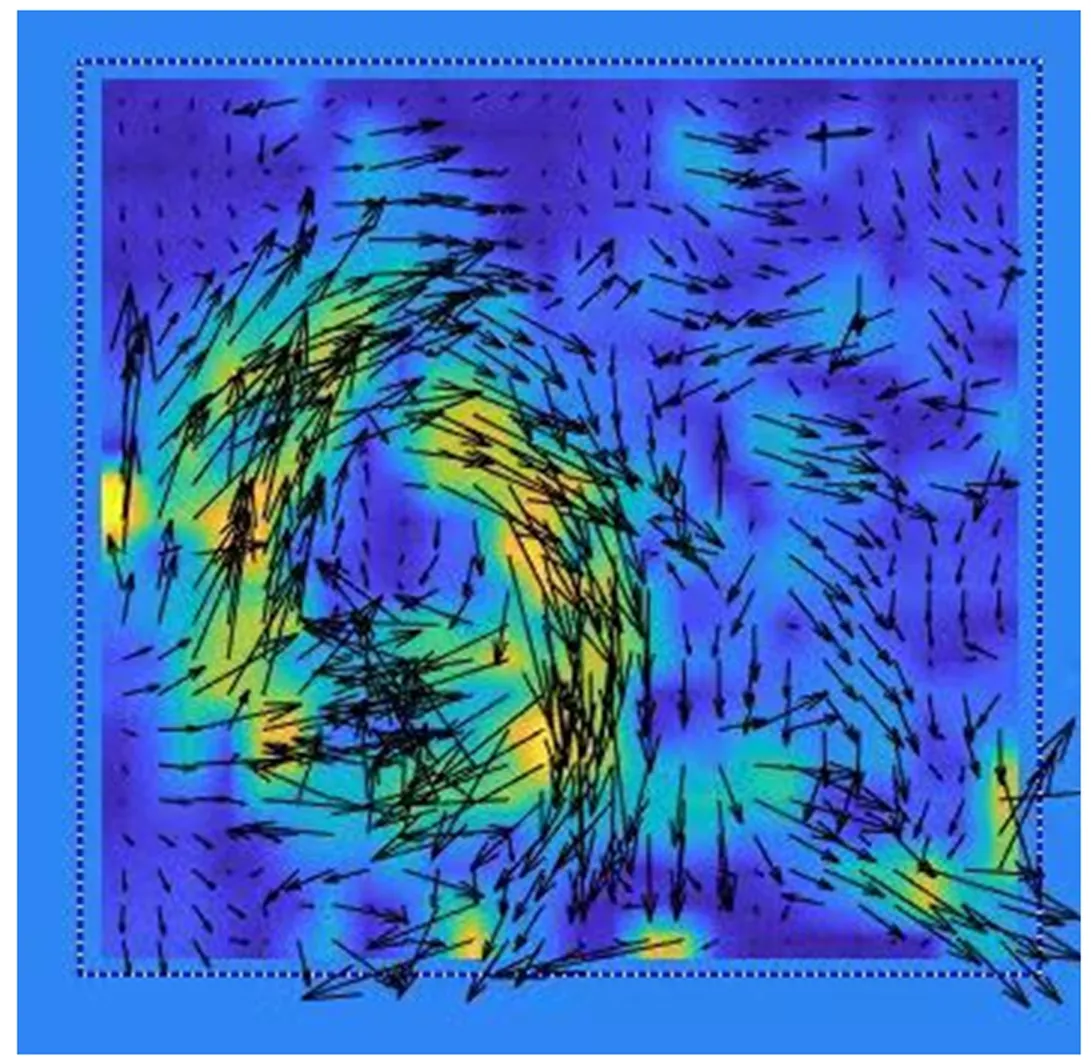
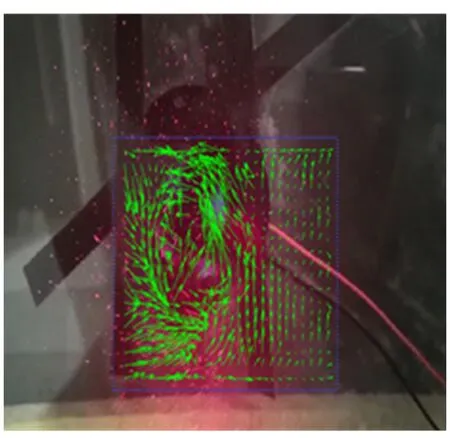
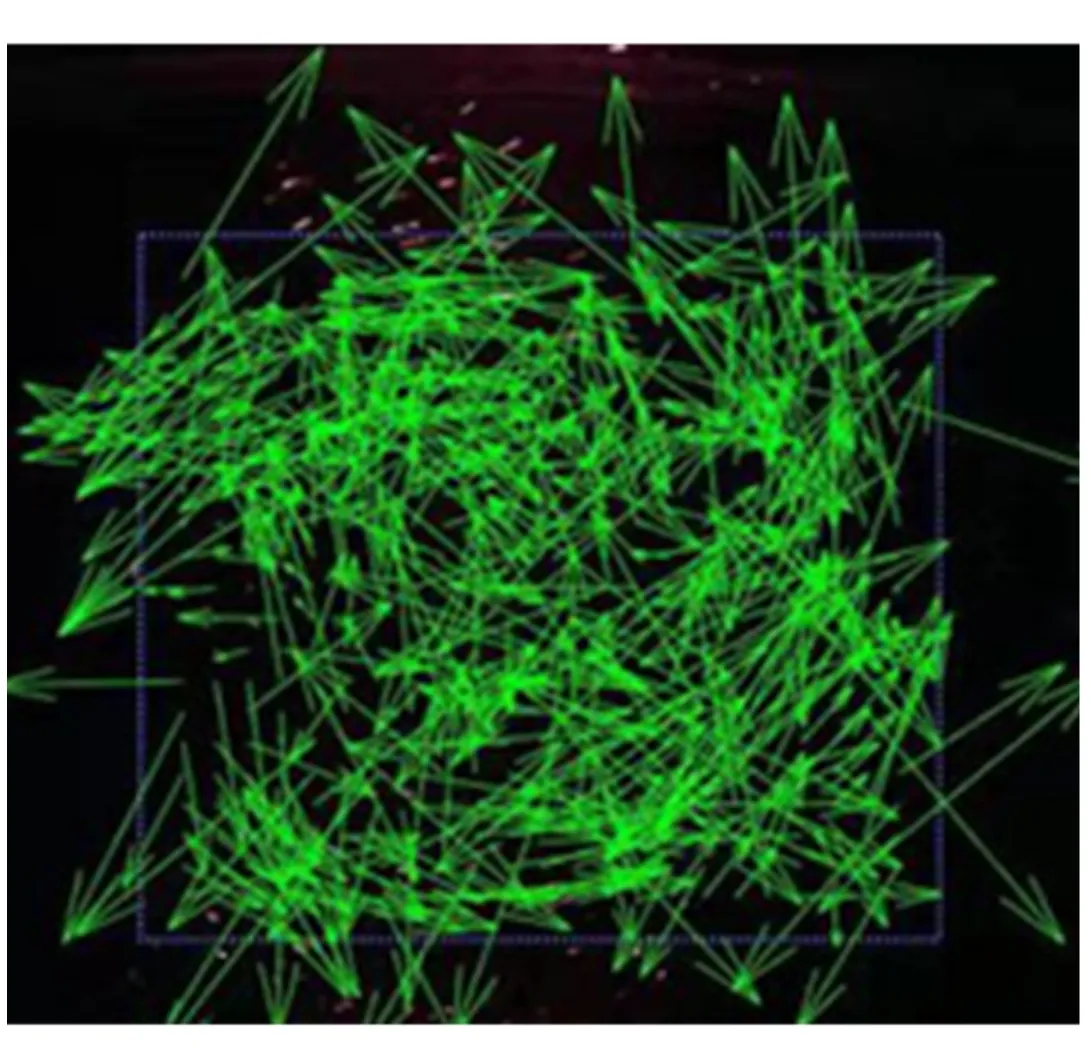
2)通過PIV L選取合適的分析區域,在設置pass 1 的interrogation area為35,step為32,pass 2 的interrogation area為32,step為16,分析得到圖9所示的矢量分析圖.
可以看出,在扇葉正上方產生的渦旋分析結果良好,能夠明顯看到渦旋.
3)導出渦旋的渦度分布圖與速度分布圖,如圖10和圖11所示.
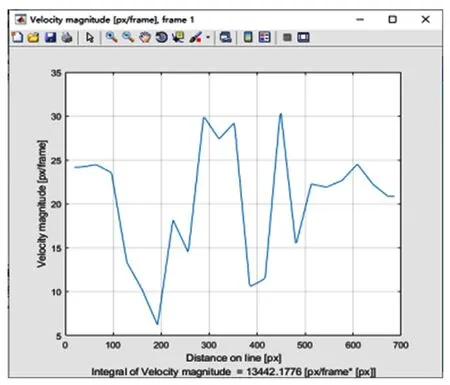
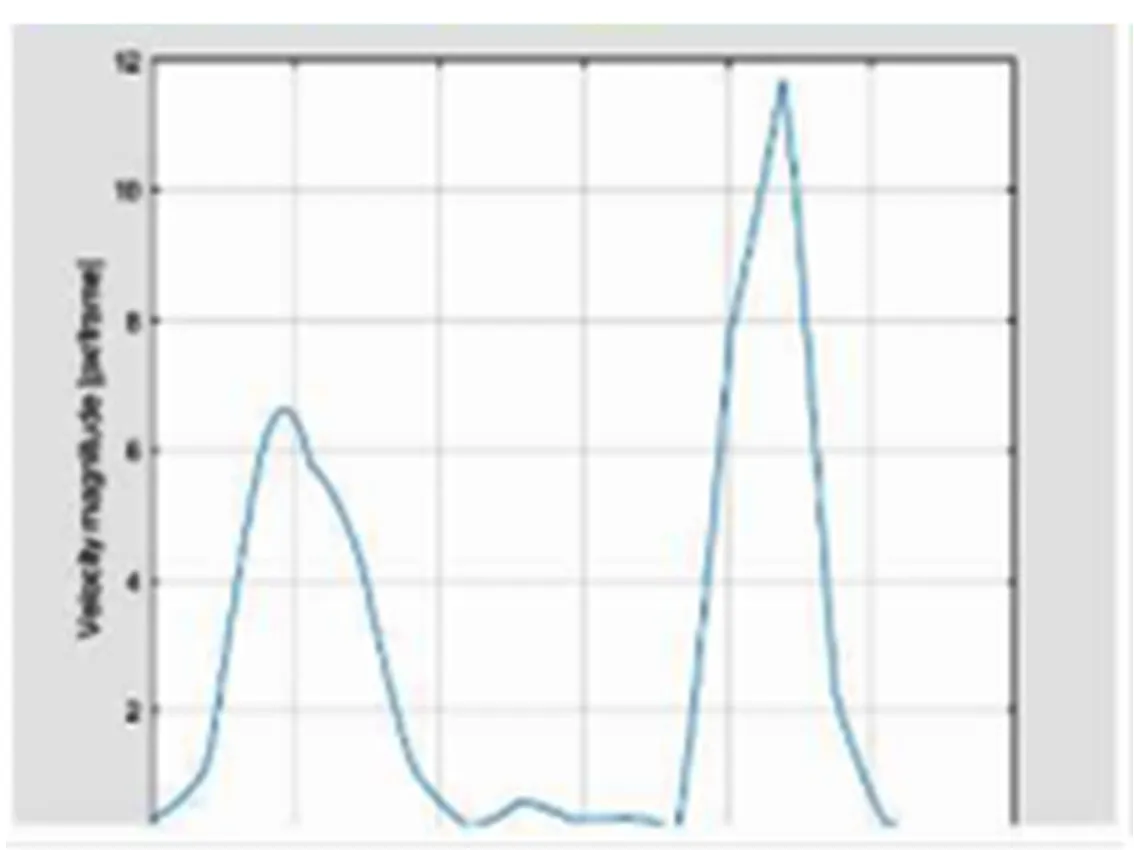
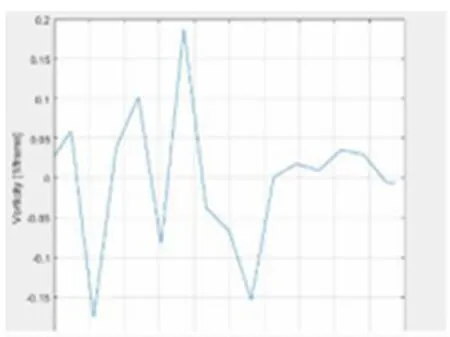
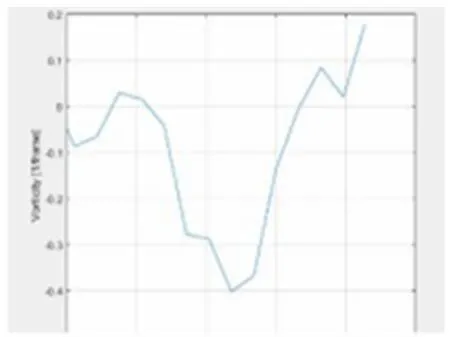
4)取過渦旋中心的1條直線,可以得到此條直線上的渦度數據與速度數據如圖12和圖13所示.
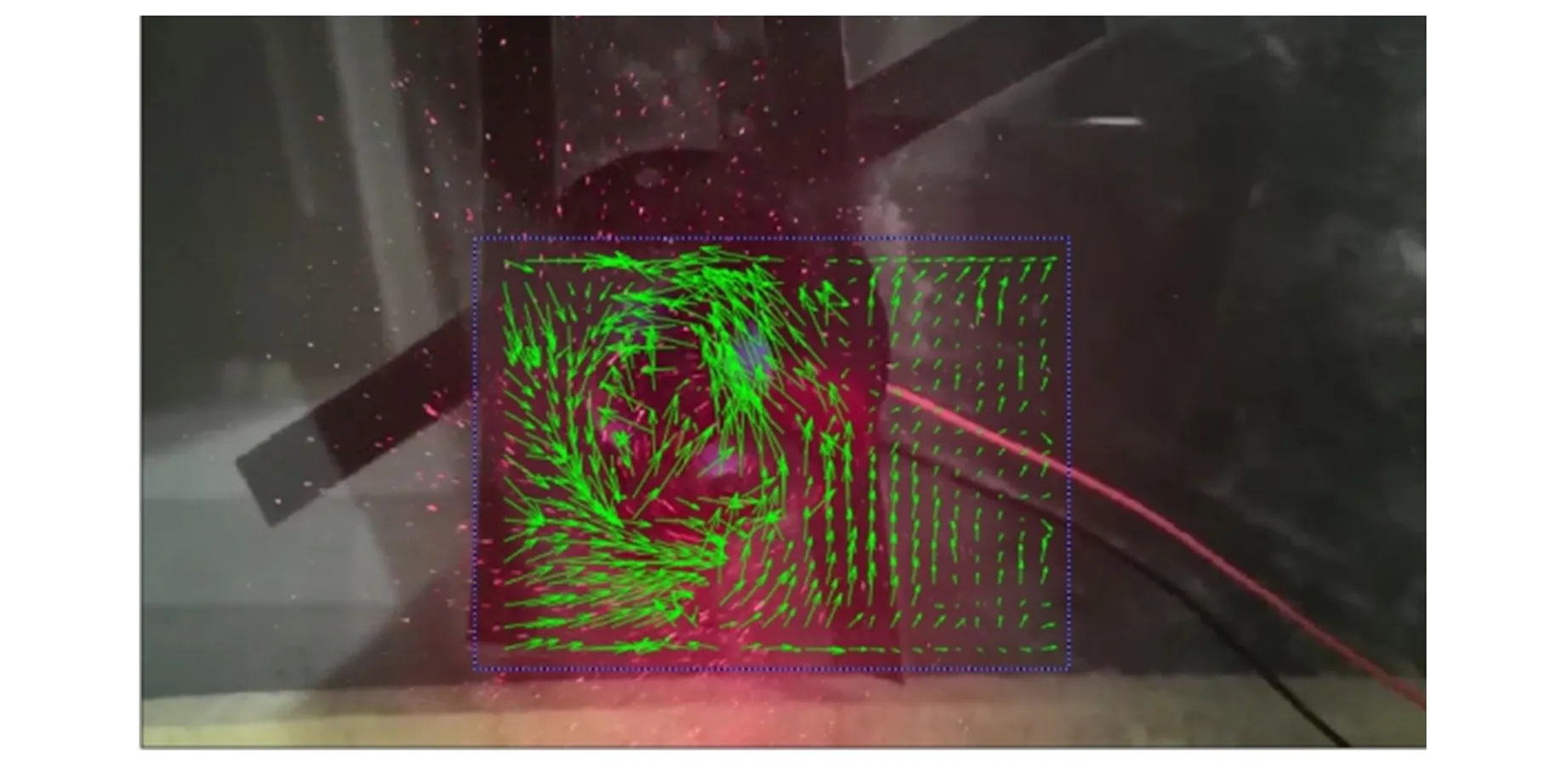
圖9 渦旋矢量圖
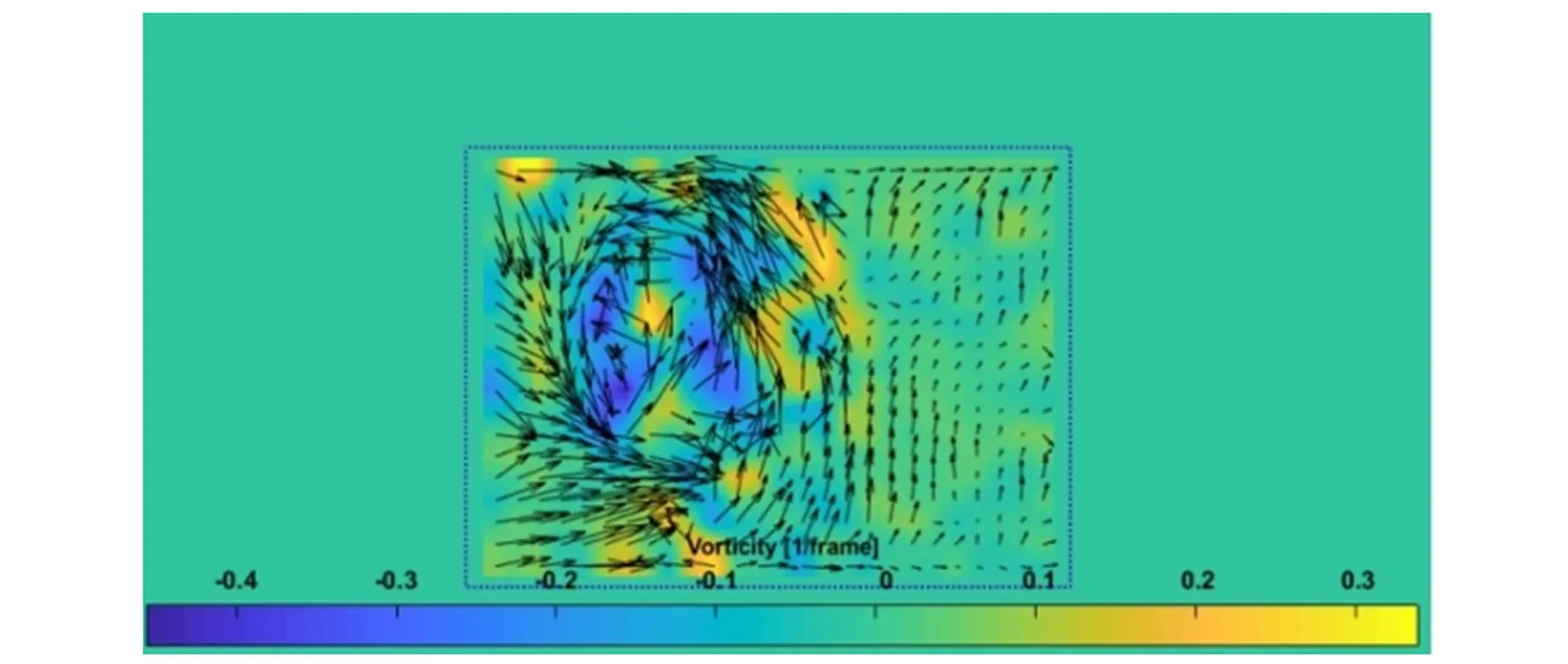
圖10 渦度分布圖
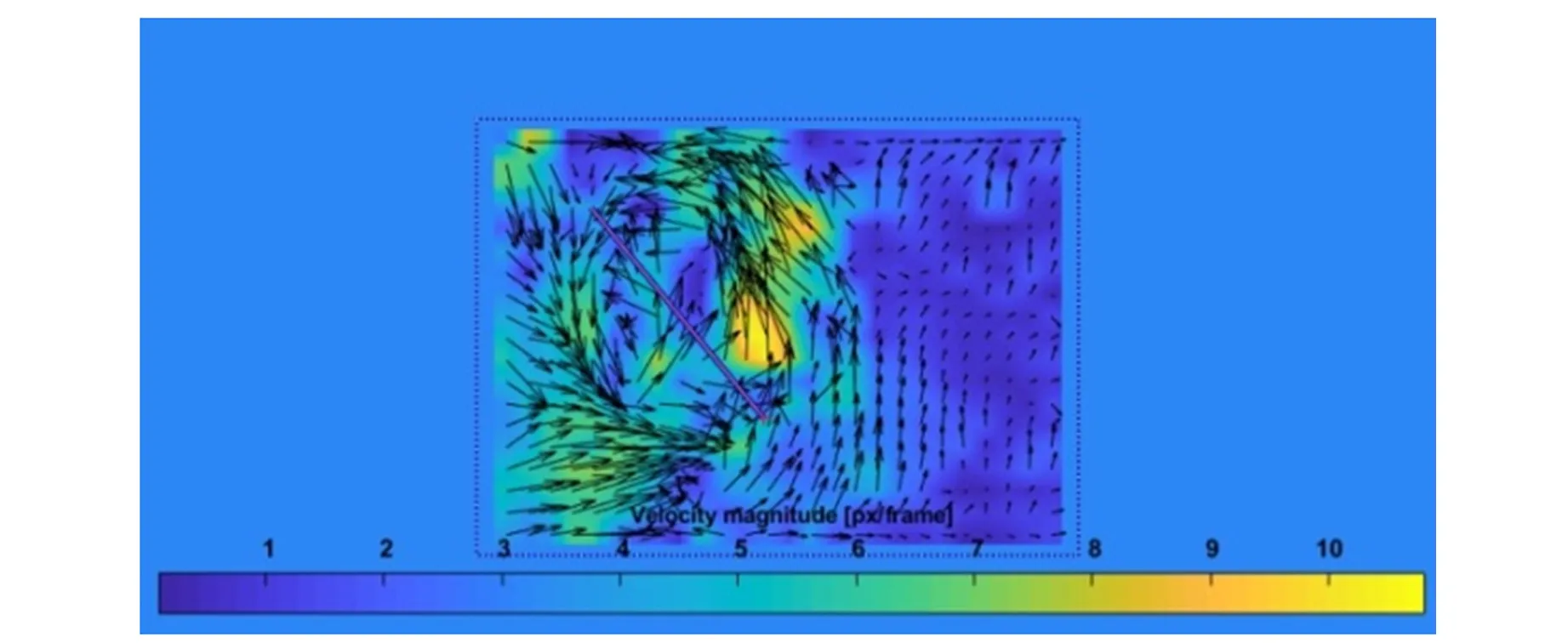
圖11 速度分布圖

圖12 渦度數據圖
可以看出在渦旋結構的中央,即扇葉直接作用區存在速度低值區,而在此區域外速度大小將快速增加直至達到最大值,后速度大小沿徑向緩慢降低. 與速度分布規律相反的是:渦度最大值位于渦心處,后沿徑向迅速減小直至渦度達到最低值,此時的渦度小于零. 隨后渦度開始向正值移動,靠近邊界處的渦度值再次下降,并沿徑向緩慢恢復至零渦度. 此分析結果與實驗原理部分中渦旋理論分析結果一致,表明該實驗數據合理[14].
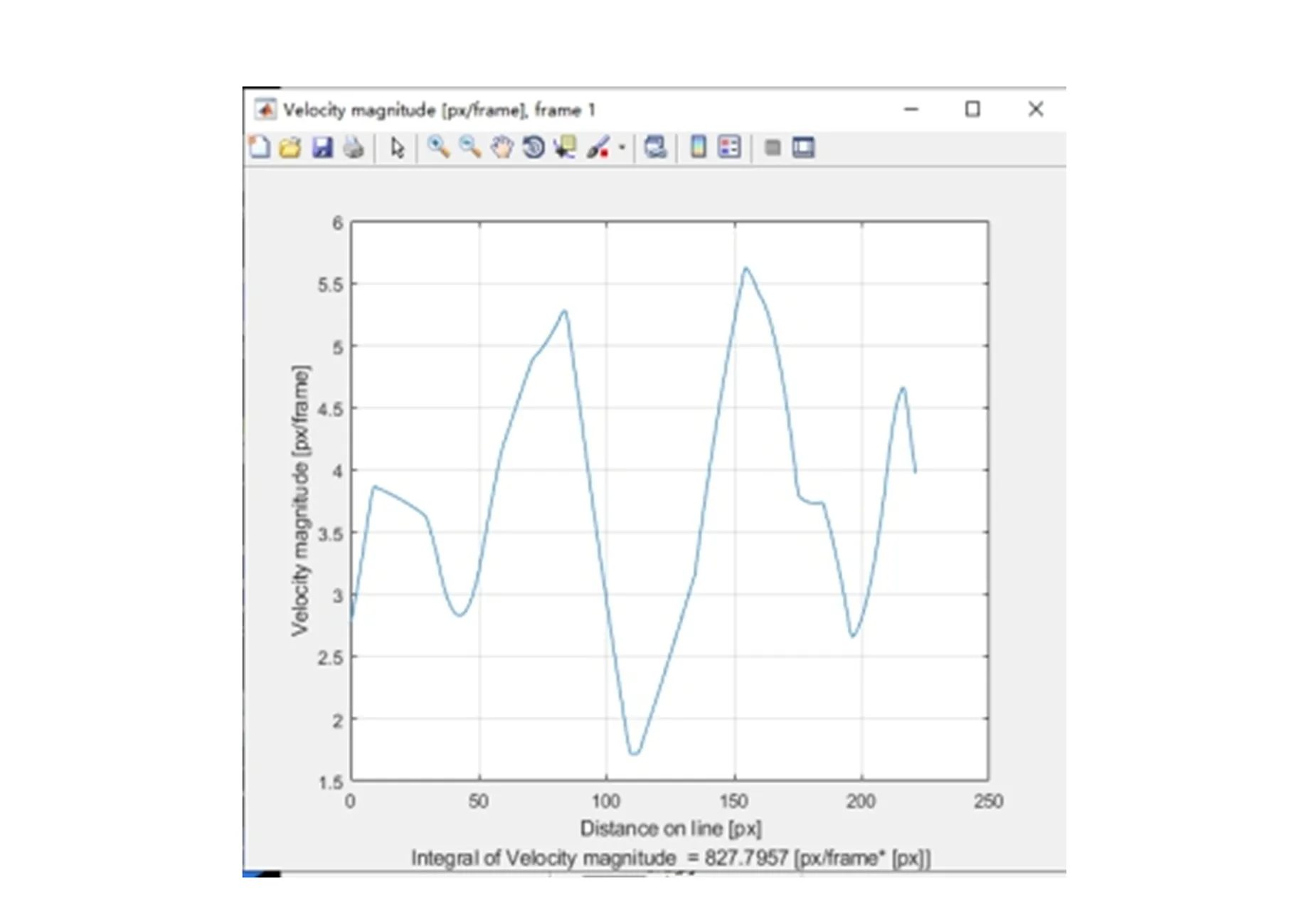
圖13 速度數據圖
3.3 不同扇葉半徑的對比分析
為了達到較好的實驗效果,在實驗最開始設置了扇葉半徑為3cm,4cm及5cm的對比實驗,并得到其各自的渦度矢量圖,通過對比確定效果最佳的方案,結果如圖14~15所示.
由圖14~15可知:選取半徑為3 cm的扇葉進行實驗時,能夠產生明顯的渦旋,但是分析效果不好;選取半徑為4 cm的扇葉進行實驗時,既能夠有良好的渦旋產生,且數據分析效果很好;選取半徑為5 cm的扇葉進行實驗時,不能夠產生完整的渦旋. 綜上所述:在基于現有實驗條件下,半徑為4 cm的扇葉最為合適.
3.4 不同轉速的對比分析
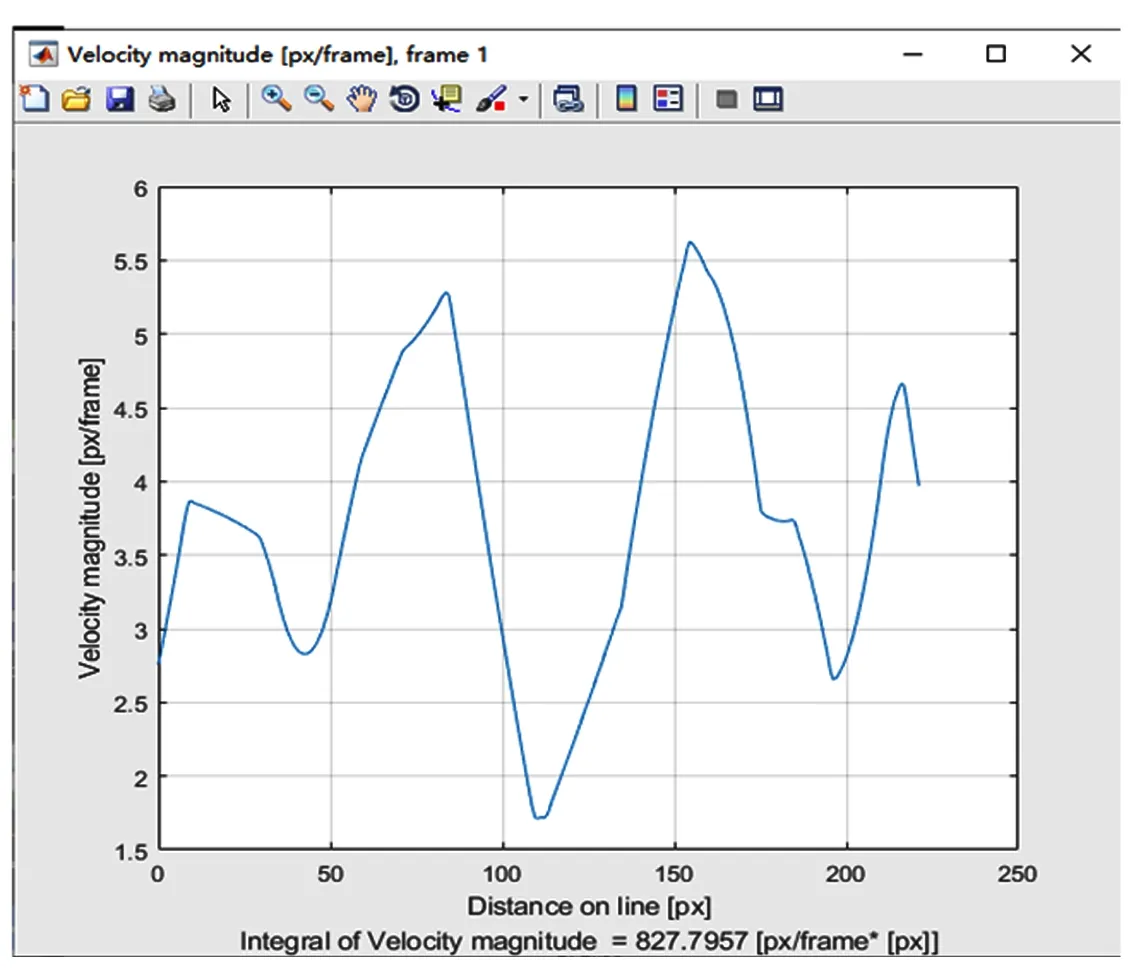
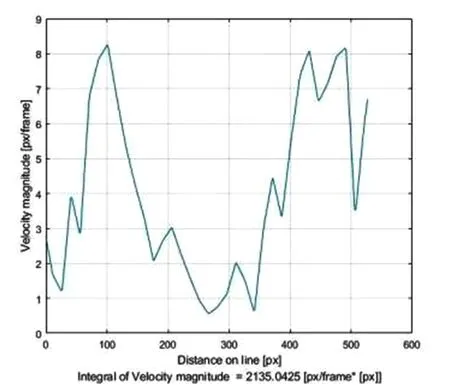
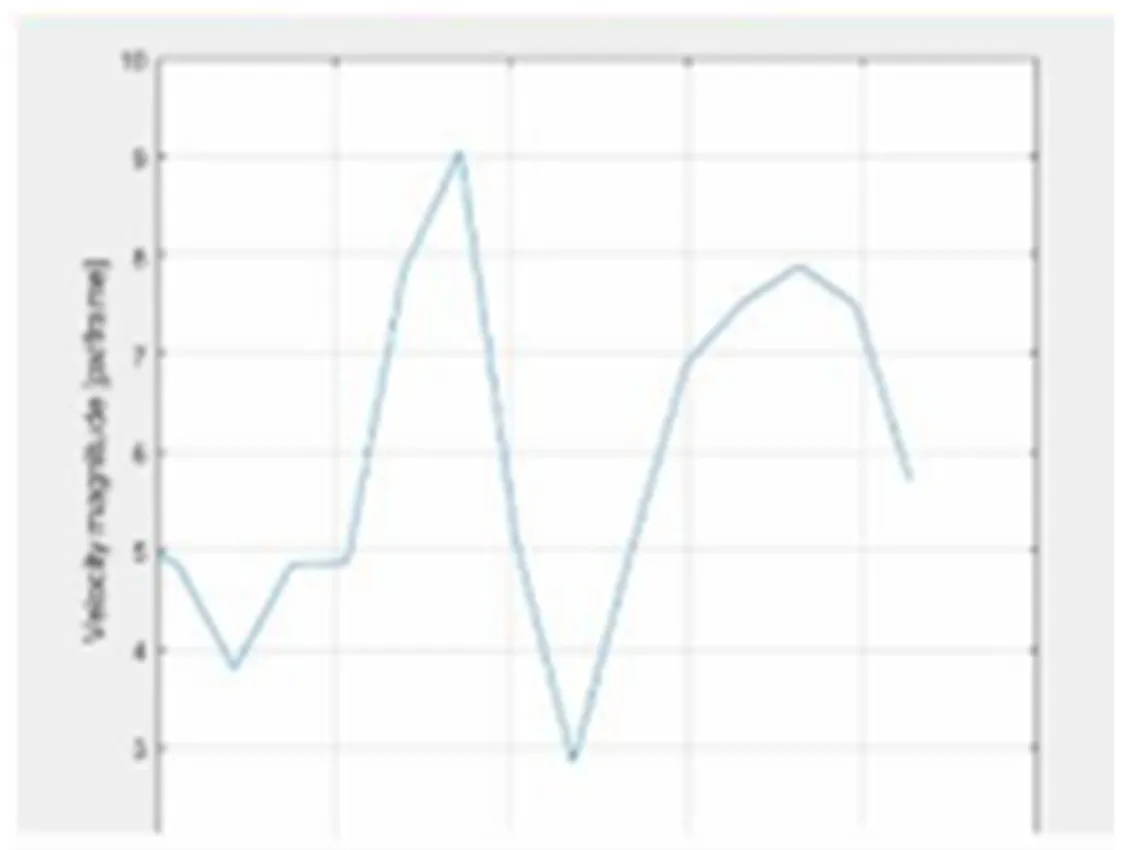
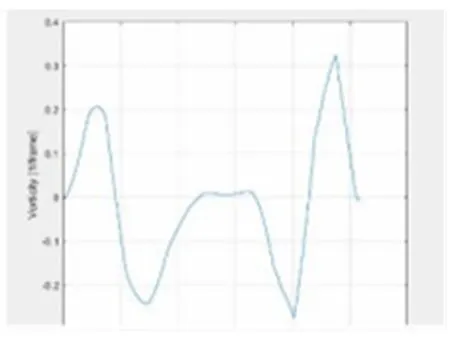
控制電機占空比在0~100%可調,在實驗最開始設置了0,40%,88%對比實驗,發現在占空比為88%的情況下,產生的渦旋更便于后續的處理分析,且效果較好. 而占空比為0的情況下,產生大量氣泡,影響渦旋的測量. 在占空比為88%的基礎上,設置占空比為80%,88%,96%,并得到其各自的速度分布圖(圖16)和渦度分布圖(圖17),通過對比確定較為合適的轉速.
結果發現,渦旋的速度和渦度大小隨著占空比的增大而增大,當占空比為88%時,渦旋處理效果最為顯著并且實驗數據更為穩定可靠.
(a)3 cm
(b)4 cm
(c)5 cm
圖14 不同扇葉半徑下的渦度矢量圖
(a)3 cm
(b)4 cm
(c)5 cm
圖15 不同扇葉半徑下的渦度數據圖
80%
88%
96%
圖16 不同占空比下的速度分布圖
80%
88%
96%
圖17 不同占空比下渦度數據分布圖
4 結束語
從理論上分析了流體渦旋產生的原理和相關物理性質,并依據相關原理設計實驗裝置,實現了電機驅動扇葉情況下結流體中渦旋生成、移動、測量的過程,并通過對渦旋具體結構和物理量分布規律的觀測分析,定性地驗證渦旋速度和渦度的分布規律. 經數據分析處理,得出結論,渦旋速度從渦旋中心向兩側逐漸增大,到達電機扇葉邊緣即渦旋內部邊界之后,速度迅速減小;渦度最大值位于渦旋內部即電機扇葉以內,超過扇葉半徑后沿徑向迅速減小,與理論分析一致. 同時實驗裝置可控性強,操作簡便、數據可視化,有利于更好地理解渦旋在完整的運動和移動過程中具有的狀態及其產生的影響.
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55