提臂、握拳、翻肘!簡單手勢+肌肉信號近乎“無縫”操控?zé)o人機(jī)
2020-06-09 12:29:22寇建超
海外星云 2020年7期
寇建超
愛因斯坦曾說,“唯一真正有價值的東西是直覺”。但直覺這種東西很難言傳身教,尤其是對機(jī)器而言。如何讓機(jī)器感知人類直覺并作出正確的反饋?這可能是每個人都會關(guān)心的問題。
我們想與機(jī)器實(shí)現(xiàn)如人與人間那樣的無縫交流,但使用預(yù)先指定的語音/觸摸屏命令或設(shè)置復(fù)雜的傳感器后,往往讓機(jī)器變得很笨拙。讓機(jī)器理解我們的非語言暗示,比如手勢,可能是實(shí)現(xiàn)更廣泛人機(jī)協(xié)作的重要一步。此外,肌肉信號也可以為機(jī)器提供難以從視覺上觀察到的狀態(tài)信息。

肌 電圖 傳感 器 監(jiān) 測 肱 二 頭 肌、肱三頭肌和 前臂肌肉
一項(xiàng)來自麻省理工學(xué)院計(jì)算機(jī)科學(xué)與人工智能實(shí)驗(yàn)室(MIT CSAIL)研究學(xué)者的新研究,或許可以實(shí)現(xiàn)“近乎無縫”的人機(jī)協(xié)作。相關(guān)論文已發(fā)表在ACM/IEEE國際人機(jī)交互會議上。
“我們設(shè)想這樣一個世界——機(jī)器可以幫助人類進(jìn)行認(rèn)知和體力勞動。但要做到這一點(diǎn),機(jī)器需要主動適應(yīng)人類,而不是人類去適應(yīng)機(jī)器。”麻省理工學(xué)院計(jì)算機(jī)科學(xué)與人工智能實(shí)驗(yàn)室主管、論文作者之一丹妮拉·羅斯教授說。
用 手 勢 和 肌 肉信號控制無人機(jī)
在一個名為“Conduct-A-Bot”的系統(tǒng)中,研究人員通過在肱二頭肌、肱三頭肌和前臂上放置肌電圖和運(yùn)動傳感器,使用簡單手勢和肌肉信號成功操控了機(jī)器的動作。該系統(tǒng)旨在減少普通用戶與機(jī)器交互的障礙,通過使用少量可穿戴傳感器和即插即用的機(jī)器學(xué)習(xí)算法,為人類與機(jī)器助手或其他電子設(shè)備進(jìn)行更自然地交流建立了新的可能。

記錄肌肉和運(yùn)動信號
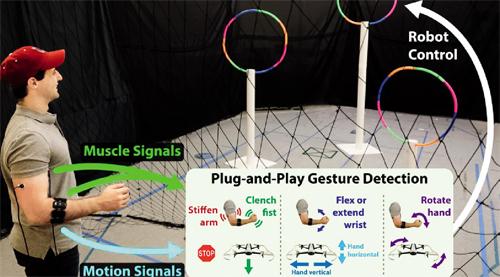
研究學(xué)者表示,該系統(tǒng)可用于各種潛在場景,包括電子設(shè)備上的導(dǎo)航菜單和監(jiān)督自主機(jī)器人。在這項(xiàng)研究中,測試對象為“Parrot Bebop 2”無人機(jī),通過旋轉(zhuǎn)手勢、握緊拳頭、緊繃手臂和移動前臂等動作,控制無人機(jī)向左右、上下和前后移動,以及旋轉(zhuǎn)和停止。結(jié)果顯示,無人機(jī)在 1500 次實(shí)驗(yàn)中正確識別了 82% 的手勢,識別準(zhǔn)確率較高。
在無人機(jī)試驗(yàn)中,基本手勢對應(yīng)動作如下:緊繃上臂,使無人機(jī)停止運(yùn)動(類似于人在犯錯時表現(xiàn)出的短暫畏縮):肱二頭肌和肱三頭肌信號;單手左右、上下擺動,使無人機(jī)側(cè)向或垂直移動:前臂肌肉信號(用前臂加速度計(jì)指示手的方向);握拳,使無人機(jī)向前移動:前臂肌肉信號;順時針/逆時針旋轉(zhuǎn),使無人機(jī)轉(zhuǎn)向:前臂陀螺儀。
快速理解人類手勢,有助于機(jī)器對人類在日常生活中使用的非語言信號作出正確反饋。“該系統(tǒng)可以幫助我們與機(jī)器進(jìn)行無縫互動,就像人與人那樣。”論文第一作者約瑟夫·德爾普雷托表示。
在此次無人機(jī)試驗(yàn)中,該系統(tǒng)無需離線校準(zhǔn)或訓(xùn)練數(shù)據(jù)就能檢測預(yù)定義的手勢,只需簡單佩戴 EMG(肌電圖)和 IMU(慣性測量單元)傳感器,就可以遠(yuǎn)程操控?zé)o人機(jī)。佩戴在肱二頭肌和肱三頭肌上的肌電圖傳感器用于檢測上臂肌肉何時緊繃,前臂上的肌電圖和運(yùn)動傳感器則用于檢測手勢和肌肉信號。
當(dāng)研究人員在做控制機(jī)器的手勢時,該系統(tǒng)會根據(jù)來自肌肉的信號進(jìn)行自動校準(zhǔn),從而使普通用戶可以更快、更容易地與機(jī)器互動。在這一過程中,該系統(tǒng)利用機(jī)器學(xué)習(xí)算法同步處理采集到的肌肉信號,實(shí)時檢測手勢,且無需進(jìn)行任何離線校準(zhǔn)。
機(jī)器學(xué)習(xí)分類器使用可穿戴傳感器檢測手勢。無監(jiān)督分類器對肌肉和運(yùn)動數(shù)據(jù)進(jìn)行處理,并對其進(jìn)行實(shí)時聚類,學(xué)習(xí)如何將手勢與其他動作區(qū)分開來,神經(jīng)網(wǎng)絡(luò)也可以通過前臂肌肉信號預(yù)測手腕的彎曲或伸展。
研究人員表示,“這個系統(tǒng)使我們實(shí)現(xiàn)與機(jī)器無縫工作的愿望又近了一步”,它們會成為更有效和更智能的工具以完成日常任務(wù)。
然而,要想在現(xiàn)實(shí)場景中普遍有效,就需要保證該系統(tǒng)簡單可用。研究人員表示,該系統(tǒng)根據(jù)以前用戶的數(shù)據(jù)進(jìn)行訓(xùn)練,而不需要每個用戶提供新的訓(xùn)練數(shù)據(jù);該系統(tǒng)只使用兩、三個可穿戴傳感器,不需要其他多余的東西,大大降低了普通用戶與機(jī)器互動的障礙。
這種類型的系統(tǒng)最終可以應(yīng)用于人機(jī)協(xié)作的一系列應(yīng)用,包括遠(yuǎn)程探測、個人助理機(jī)器人,或者像運(yùn)送物品或搬運(yùn)材料這樣的機(jī)械任務(wù)。
此外,該系統(tǒng)可能為未來的非接觸工作開辟一個新領(lǐng)域。比如,在保持一個安全距離的前提下,我們可以控制機(jī)器人打掃醫(yī)院病房、為病人開藥等。
未來,研究小組希望擴(kuò)大測試對象范圍,比如增加更連續(xù)的或用戶自定義的手勢。最終,研究人員希望機(jī)器可以從這些人機(jī)互動中自我學(xué)習(xí),從而更好地理解任務(wù),提供更有預(yù)見性的幫助,增加它們的自主權(quán)。(摘自美《深科技》)(編輯/諾伊克)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25