太陽能光伏檢測跟蹤與自動灌溉實驗裝置
2020-06-07 02:28:16黎會鵬畢博倫劉保懷
電腦知識與技術 2020年35期
黎會鵬 畢博倫 劉保懷
摘要: 為了提高太陽能光照能源的收集效率和水資源的利用率,本設計提出了一種太陽能光伏檢測與自動灌溉實驗裝置。設計由STM32F103控制器為核心,由光照檢測電路、電機驅動電路、姿態傳感器電路、濕度檢測電路和調速電路組成。通過檢測光照方向,驅動電機調整太陽能晶體板方向,達到光照跟蹤的目的。定時檢測土壤濕度和環境溫度,通過PWM調整水泵轉速,控制灌溉量。測試表明,該系統有較強的實用價值。
關鍵詞:STM32;光照跟蹤;濕度;灌溉;調速
中圖分類號: TP934? ? ? ? 文獻標識碼:A
文章編號:1009-3044(2020)35-0222-03
開放科學(資源服務)標識碼(OSID):
1 前言
近年來,隨著氣候變化、環境污染和淡水資源的大量工業用途,可利用的淡水資源日益減少,全國各地水資源的日趨緊張[1]。對此,國內一直都在積極探索解決灌溉所用水資源短缺的問題,如近期水稻專家袁隆平提出的發展海水稻的就是為了應對我國淡水資源匱乏。太陽能是一種可再生的清潔能源[2],不會像化石燃料在轉化成能量過程中,造成環境的破壞,國內已經有大量太陽能成功利用的實用案例,但是存在能量收集率不高的問題。對于目前而言,提高太陽能利用率,節約灌溉用水就是一條行之有效的應對措施[3-4],太陽能自動灌溉系統便是為了應對節約能源,節約用水而發展起來的。本文研究的太陽能光伏檢測跟蹤和自動灌溉裝置,是通過高效收集太陽能源,同時對土壤的濕度進行實時監測,然后根據設定參數執行相應的操作。
2 系統設計與實現
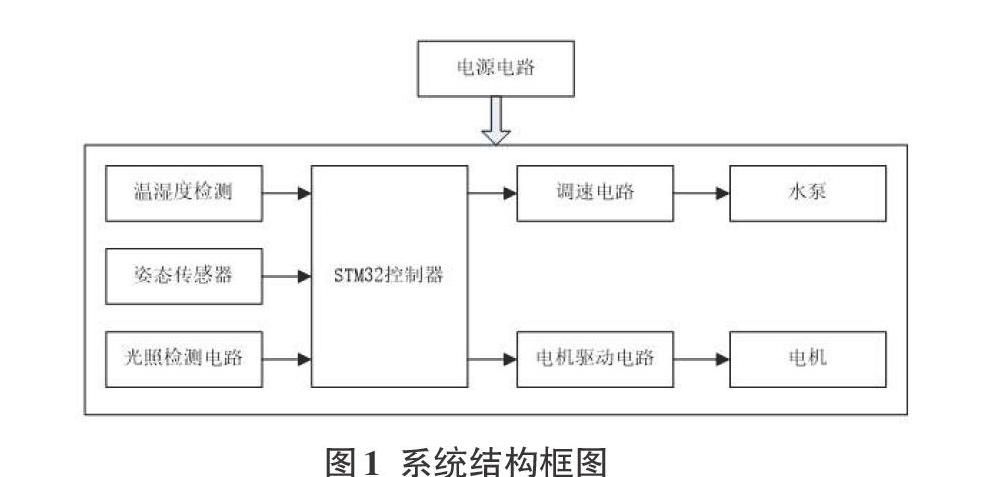
本設計為一款以太陽能光照為能源的自動灌溉系統,太陽能光伏板為系統的能源輸入,將光能轉換成太陽能,在蓄電池中進行存儲。為了提高光源利用效率,設計采用光敏器件檢測陽光的偏轉方向,由控制器驅動步進電機,調整太陽能光伏板位置,使入射光線與光伏板平面垂直,增強系統對太陽能的采集效率。為了自動對土壤進行灌溉,設計通過濕度和溫度傳感器檢測環境信息[5],控制器經過判斷處理,根據設置參數,完成對土壤的灌溉。系統的總體設計框架如圖1所示。
本系統按照功能可分為太陽能光照跟蹤采集和土壤灌溉兩部分,由溫濕度檢測電路、姿態傳感器電路、光照檢測電路、控制器電路、調速電路、電機驅動電路和電源電路組成。控制器選用STM32微處理器,提供信息采集和判斷處理功能。電源電路將電壓進行轉化,提供給各模塊電路使用。
2.1 控制器介紹
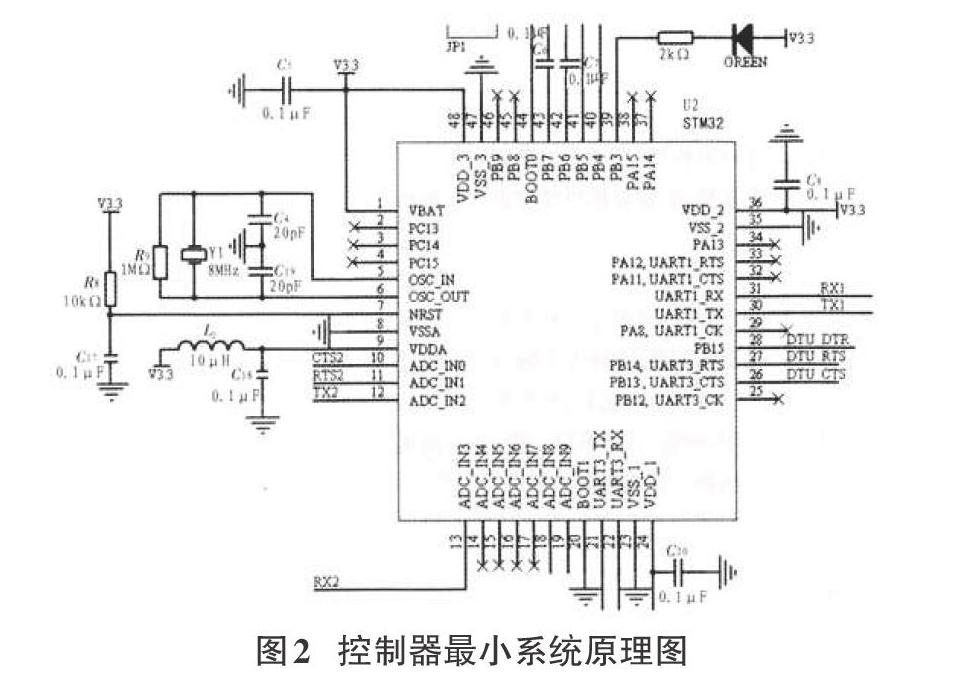
控制器選用ST公司的STM32F103RET6微處理器[6],作為系統控制核心,STM32控制器為跟蹤系統和灌溉系統最主要組成部分。在光照跟蹤過程中,控制器完成與外圍光照檢測傳感器和太陽能面板姿態傳感器之間的數據采集工作。通過分析計算太陽位置,驅動電機帶動太陽能面板支架,調整面板姿態。灌溉過程中,根據溫度和濕度變化,調整灌溉水量[7-8]。控制系統最小系統電路如圖2所示。
2.2 姿態傳感器
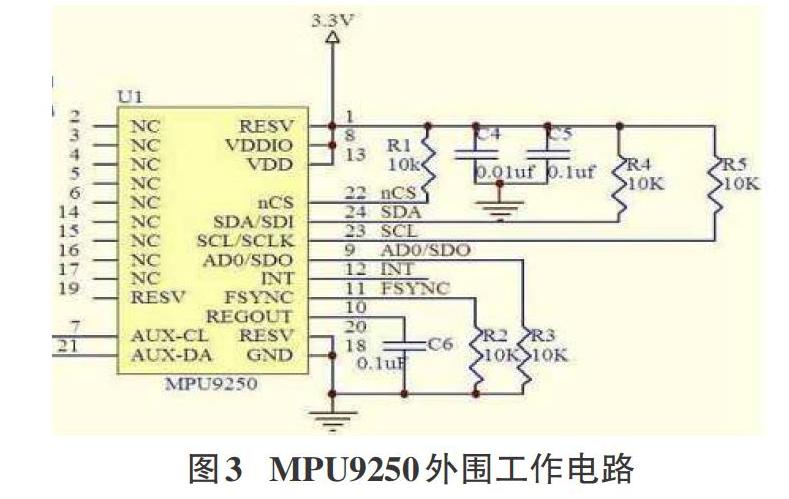
本設計中,需要測量太陽能晶體板的姿態角度,因此選用MPU92509軸姿態傳感器。MPU9250內部集成電子羅盤、加速表和MEMS陀螺儀,可以同時對三個軸的加速度、磁場強度、角速度參數進行測量,具有良好的動態響應特性。
MPU9250芯片與控制器之間采用IIC總線進行通信,本設計中通信速率為100k Hz/s。設置的加速度范圍最大為±8g,角速度測量范圍最高為±250rad/s,工作電壓為3.3V,MPU9250工作電路如圖3所示。
2.3 步進電機驅動器
為了實現太陽光照的跟蹤功能,本設計使用步進電機28BYJ48來調節太陽能晶體板支架的方位。28BYJ48為4相工作步進電機,工作時控制器無法直接驅動,需要外接驅動器。本設計采用ULN2003A芯片進行電機驅動,步進電機工作在4相8拍方式,工作電壓為5V,驅動器ULN2003A的外圍工作電路圖如圖4所示。
2.4 濕度檢測
濕度檢測電路如圖5所示,R為濕度傳感器,輸出為電阻變化,LM393為比較器,通過VR1電位器可以手動調節土壤濕度控制閾值,控制DO端口輸出狀態。AO端口為模擬量輸出,通過控制器的AD輸入采集,可以獲取土壤濕度的變化狀態,工作電路圖如圖5所示。
2.5 調速電路
本設計為了實現灌溉功能,采用直流微型潛水泵對土壤進行灌溉,水泵工作電壓為12V。為了調節灌溉水量和流量,實現精準灌溉,需要對水泵流量進行調節。調速采用PWM方式,通過控制場效應管開關來完成,調速電路如圖6所示。
2.6 電源電路
因系統各電路工作電壓不同,需要電源電路完成電壓轉換功能。本設計將12V電壓轉化成5V和3.3V,提供給控制器和各傳感檢測電路使用。
3軟件設計
軟件系統開發采用Keil5開發平臺進行設計,系統開始啟動,通過光照檢測陽光方向,調整傳動機構,使太陽能晶體板平面與太陽入射光線垂直,提高系統效率。同時,通過土壤濕度傳感器對土壤的濕度和環境溫度進行采集,由控制器控制水泵進行灌溉。
3.1 光照跟蹤流程
通過光照檢測電路搜索光照的方向,進行相應的操作,控制流程圖如圖7所示。
3.2 灌溉流程
系統將采集的溫濕度數據與系統設定值作對比,若測量的數值小于系統參數的15%,則系統啟動水泵實施灌溉,根據差值動態調整水泵的流量。當土壤濕度傳感器測量的數值大于設置值的15%時,則控制器發出指令,水泵停止灌溉。然后返回定時,當定時的時間到后,則土壤濕度傳感器重新測量土壤濕度,如此循環往復,實現自動灌溉功能,灌溉流程圖如圖8所示。
4 結語
本系統通過光照自動跟蹤,提高了能量的收集能力。通過環境溫度和土壤濕度檢測,綜合判斷灌溉水量,起到了對水資源合理有效利用的目的。本實驗裝置主要針對小型灌溉系統,是對智能灌溉系統設計的一種有效探索。
參考文獻:
[1] 盛會,郭輝,張學軍,等.淺談智能灌溉技術應用現狀[J].新疆農機化,2016(1):23-27.
[2] 高峰,孫成權,劉全根.太陽能開發利用的現狀及發展趨勢[J].世界科技研究與發展,2001,23(4):35-39.
[3] 劉俊巖,張海輝,胡瑾,等.基于ZigBee的溫室自動灌溉系統設計與實現[J].農機化研究,2012,34(1):111-114,118.
[4] 吳世海.立柱式雙軸全自動太陽能光伏跟蹤控制系統的研究[D].西安:西安理工大學,2017.
[5] 陸建章,楊天宇,馬小斌,等.基于單片機的雙軸太陽光追蹤器設計[J].科技創新與應用,2016(2):27-28.
[6] 張玉燕, 劉勇, 溫銀堂,等. 基于STM32的太陽自動追蹤系統[J].光學精密工程, 2016,24(10):415-420.
[7] 曹靖,宋嬌紅,王冰.農業水肥一體化智能灌溉控制系統開發與應用[J].中國農業信息,2019(6):116-122.
[8] 王應海.土壤含水量(土壤濕度)數據在智能灌溉決策系統中的應用研究[J].節水灌溉,2017(4):99-100,105.
【通聯編輯:唐一東】