基于森林密度的相位與幅度聯合反演算法
2020-06-04 00:09:26姜友誼程甲州黎曉曾致
遙感信息 2020年2期
姜友誼,程甲州,黎曉,曾致
(西安科技大學 測繪科學與技術學院,西安 710054)
0 引言
森林研究是目前研究領域的熱點之一,而如何獲取森林信息是研究森林的關鍵。全球30%的陸地面積都是森林,而遙感技術擁有大面積觀測的特點,所以高效地提供森林信息需要遙感技術的支持。森林樹高是反演森林信息的基礎。極化干涉合成孔徑雷達(polarimetric SAR interferometry,PolInSAR)不但擁有微波遙感全天時、全天候的特點,也綜合了極化和干涉技術對散射體高度、形狀等信息敏感的優點,利用PolInSAR技術反演森林樹高已經成為林業研究的熱點之一。
自從Cloude等[1]在1998年首次利用DEM差分法反演極化干涉SAR數據得到植被高度后,各種森林樹高反演算法開始涌現;2001年,Cloude等[2]提出RVoG模型后,此模型一直在樹高反演和生物量估計領域占據主流地位,以后的反演方法也大都基于該模型;由于RVoG模型直接解法困難,Cloude等[3]根據其在復平面上直線分布特點,提出三階段反演算法提取樹高,在保證精度的同時大大簡化了反演過程;2005年,Cloud等[4]提出了相位與幅度聯合反演法,獲得了較高的穩定性;國內學者李哲等[5-7]對傳統算法進行了比較評價。隨后國內外的研究集中在如何提高反演精度上。由于干涉測量數據采集期間產生的時間去相干是主要的誤差源,為了消除時間去相干的影響,國內外學者對此做了很多研究,如Lavelle等[8-10]開展的工作。三階段算法對體相干的估計是粗略的,為了準確求解RVoG模型,引入了各種優化算法,如遺傳算法[11]和模擬退火法[12]。也有學者通過在模型中引入其他信息來提高精度,如周廣益等[13]引入置信度區間,對置信度不同的散射單元采用不同的方法;羅環敏等[14]在樹高反演過程中引入PD極化相干優化方法;宋桂萍等[15]將極化干涉矩陣分解獲得地面散射相位;龍江平等[16]利用相位邊界優化提取地散射;陳子怡等[17]基于相位不變原則改進三階段算法。RVoG模型很好兼顧了森林的復雜性和模型的簡潔性,但隨著算法的日益成熟,學者開始考慮森林因子或其他因素等誤差源對反演結果的影響,如考慮冠層填充因子的RVoG+CFF[18]模型、考慮地形坡度的S-RVoG[19-20]模型。已有研究表明,森林密度作為植被的物理參數,對森林高度反演具有重要意義[21],許多學者證明干涉相位和相干性對植被高度和密度變化敏感[22-25]。然而,現有的樹高反演算法并沒有考慮森林密度的影響。
針對這一問題,本文提出一種考慮森林密度的相位與幅度聯合反演法。該方法改寫了傳統相位與幅度聯合反演法的公式,通過系數更加合理地利用了幅度信息和相位信息;為了使系數最優,利用PolSARpro軟件模擬的L-波段數據進行了模擬實驗,最后利用德國宇航局(Deutsches Zentrum für Luft-und Raumfahrt,DLR)與瑞典國防研究局(Swedish Defense Research Agency,FOI)機載E-SAR系統獲取的PolInSAR數據與地面實測數據,對該方法進行了實驗分析。
1 研究區概況和數據
1.1 研究區概況
研究區位于瑞典南部的Remingstorp地區(58°28′40″N,13°37′25″E),該地區地形相對平坦,總面積超過1 500 hm2,其中大約1 200 hm2為森林,其余為湖泊,海拔高度為120~145 m,樹高在10~30 m之間。主要樹種為挪威云杉(picea abies)、蘇格蘭紅松(pinus sylvestris)和樺樹(betula app),主要土壤類型為耕地土壤。圖1為研究區的光學圖片,其上的標注為樣地分布位置。
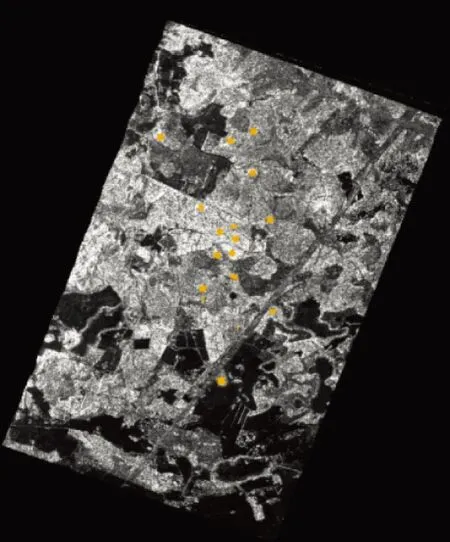
圖1 研究區光學影像
1.2 遙感數據
研究區的遙感數據分為L-波段與P-波段PolInSAR數據,為了和模擬數據相對應,本文只選擇利用L-波段數據。該數據是DLR與FOI利用機載E-SAR系統于2007年在瑞典Remingstorp獲取的,覆蓋面積大約為24.67 km2。與之對應的地面實測數據是在2007年春季采集的,包含11個密度不等的樣地單木參數,測量時胸徑大于5 cm起測并記錄樹種類型,平均樹高和森林密度等是通過實地測量獲取的,具體如表1所示。L-波段數據空間基線等于30 m,時間基線為45 min,平臺高度約為4 000 m,地面分辨率為0.75 m×0.75 m。圖2為研究區域L-波段主影像Pauli基下彩色合成圖。
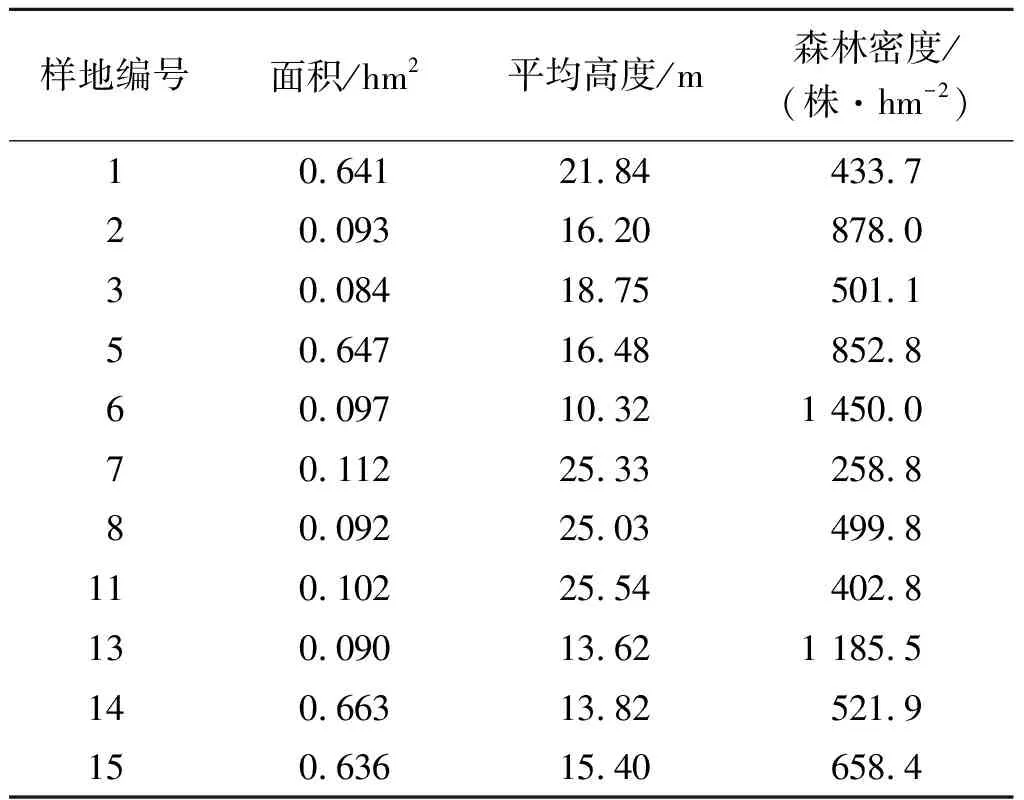
表1 樣地詳細信息

圖2 L-波段主影像Pauli基下彩色合成圖
2 技術路線與研究方法
2.1 技術路線
如圖3所示,本研究首先利用PolSARpro軟件模擬不同密度的極化干涉SAR數據,采用傳統的森林樹高反演算法分析不同森林密度對算法反演結果的影響;然后根據影響的不同,對密度加以區分,提出基于森林密度的改進相位與幅度聯合反演法,通過系數選擇不同密度下RVoG地相位法與Sinc函數法對結果貢獻大小,獲得最優反演結果;再利用模擬數據反演結果已知的特點,分別對低、高密度的森林選定不同的系數;最后通過真實PolInSAR數據與地面實測數據進行驗證,并和傳統樹高算法加以對比。圖4為森林密度在200株/hm2、800株/hm2時的模擬數據Pauli基合成圖。
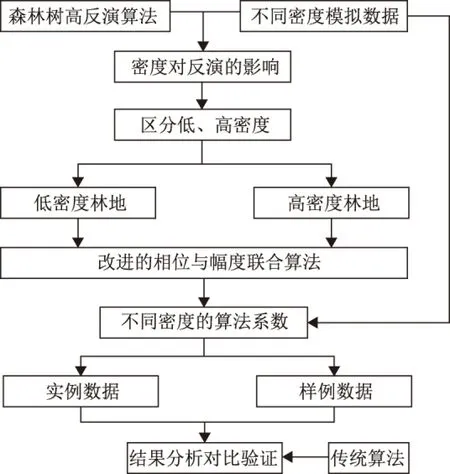
圖3 技術路線圖
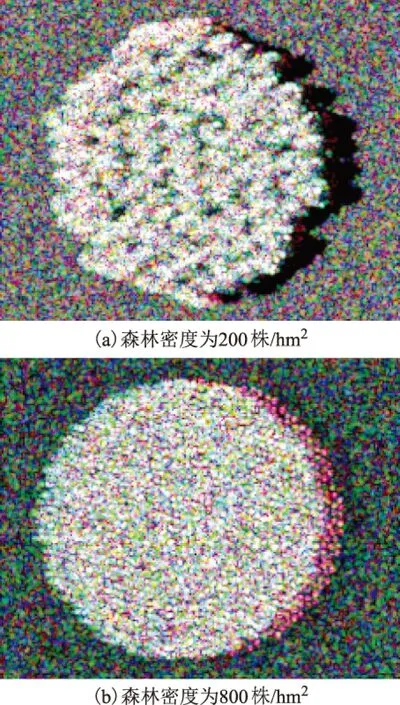
圖4 模擬數據Pauli基合成圖
2.2 相位與幅度聯合反演法
單純利用相位信息或幅度信息都會使反演結果產生較大誤差,而且二者都容易受到消光系數和森林植被垂直結構的影響。因此可以將RVoG地相位法和Sinc函數法聯合起來,形成相位與幅度聯合反演法。該算法通過系數ε,以干涉相干幅度信息對干涉相位信息進行修正,從而獲得更高的反演精度[26],如式(1)所示。
(1)
2.3 改進的相位與幅度聯合反演法
傳統的相位與幅度聯合法只是將2種算法疊加,并沒有考慮森林密度的影響。然而在森林稀疏的地區,電磁波可以充分到達地面,體散射較弱,地體散射比較大;反之稠密的森林,體散射相對較強,地體散射比較小,所以森林密度的不同會對反演算法精度產生誤差。針對這種情況,下面利用模擬數據分析森林密度的影響。
利用PolSARpro軟件模擬的數據來體現森林密度對算法的影響。分別模擬森林密度為200株/hm2、400株/hm2、600株/hm2、800株/hm2、1 000株/hm2的森林,其余參數相同,具體為:樹高18 m,平臺高度3 000 m,垂直基線1 m,水平基線10 m,入射角45°,中心頻率1.3 GHz,地面粗糙度5,土壤濕潤度4,樹種為針葉林。
由圖5可知,森林密度為400株/hm2時,三階段算法與Sinc函數法明顯出現高估,而RVoG地相位法大部分則是低估;森林密度為1 000株/hm2時的情況則恰恰相反,Sinc函數法完全低估樹高,三階段反演法也出現一定程度的低估現象,而RVoG地相位法則高估了樹高;DEM反演法在2種情況下都對高度嚴重低估,完全不適用于森林樹高的反演。此外,森林密度為200株/hm2與400株/hm2的情況大致相同,森林密度為600~800株/hm2則與1 000株/hm2的影響一樣,所以以600株/hm2為密度分界線,其下為低密度林地,其上為高密度林地;為避免后文贅述,在此說明模擬數據以400株/hm2代表低密度林地,1 000株/hm2代表高密度林地。
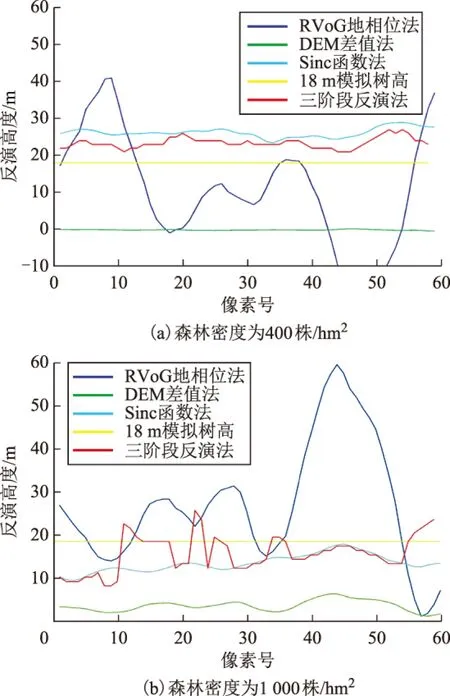
圖5 不同密度下樹高反演算法的結果
在不同密度下,RVoG地相位法與Sinc函數法造成低估和高估的不同現象。進一步分析:當森林密度較小時,體去相關因素較小,這時候的植被高度主要由相位決定,所以RVoG地相位法得到了較好的反演效果;而當森林的密度增大,體去相關因素較大,這時只利用幅度信息的Sinc函數反演法比RVoG地相位法獲得了更高的精度。
相位與幅度聯合法一般選取ε為0.4[26],來補償RVoG地相位反演法出現的低估問題,以期待獲得更好的反演精度。然而由上文可知,不同森林密度時同一種方法會產生不同的估計誤差,如Sinc函數法在森林密度為400株/hm2時產生了高估現象;而在1 000株/hm2時則會低估樹高,并且Sinc函數法高估時RVoG地相位法恰恰低估。基于2種算法高估與低估相反的現象,本文將相位與幅度聯合反演法改進為式(2),由2種方法共同對反演結果進行貢獻,并針對不同的森林密度,通過合理的系數限制,由具有優勢的方法對結果產生較大貢獻。
(2)
從PolSARpro軟件生成的多組模擬數據中選取相對最優的系數,以0.05為間隔,將ε劃分為20個區間,以反演高度的均值與模擬的18 m高度的差值為判定的指標,以此來選定低密度與高密度林區下的ε系數。
系數增大,代表著Sinc函數法對反演結果貢獻減小,而RVoG地相位法對反演結果貢獻增大。由圖6可以看出,隨著系數的增大,森林密度為400株/hm2時的反演結果由高估樹高變為低估樹高,森林密度為1 000株/hm2時的結果相反,由低估樹高變為高估樹高。由圖中的散點與直線的交點可知,森林密度為400株/hm2時選定系數為0.50,平均高度為18.31 m;而森林密度為1 000株/hm2時選定系數為0.35,平均高度為17.85 m。算法流程如圖7所示。
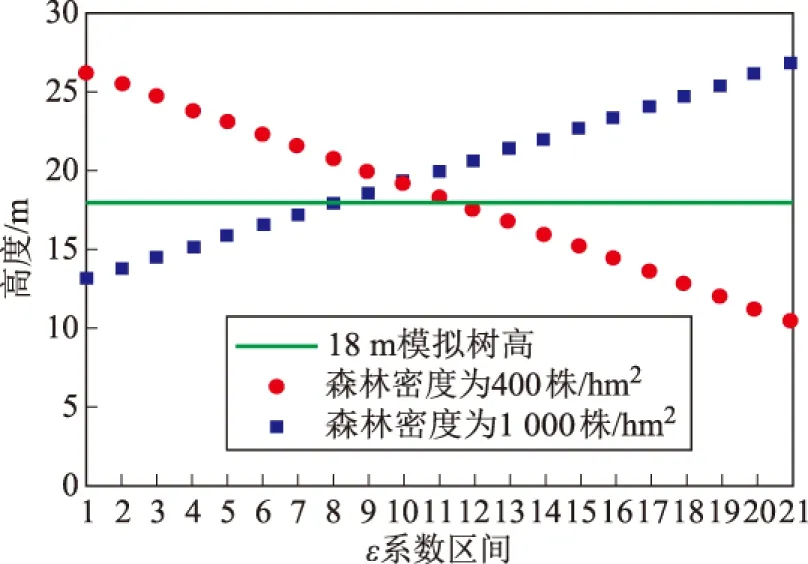
圖6 不同系數反演結果
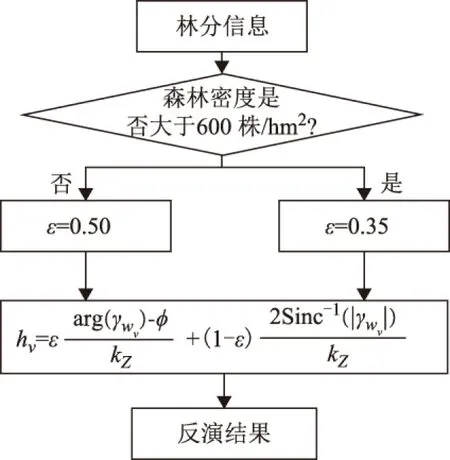
圖7 算法流程圖
森林密度為不同值時,利于本文算法和其他幾種算法分別反演模擬數據,得到結果如圖8所示。由圖8可以看出,本文算法改善了RVoG地相位法上下浮動較大的問題,并且也繼承了Sinc函數法相對穩定的特點。
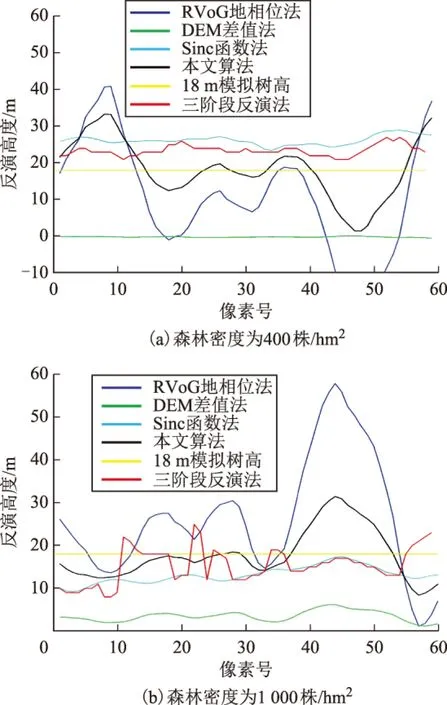
圖8 不同森林密度時本文算法與其他算法比較
3 結果與分析
結果驗證在林地尺度上展開,并與傳統樹高反演算法做對比。把每塊林地的反演平均樹高與林地相應的平均樹高作對比,做散點分布圖,如圖9所示。用均方根誤差(RMSE)和決定系數(R2)作為評價樹高反演結果的指標,如表2所示。
由表2可以看出,RVoG地相位法的相關度最低,只有0.11,其原因是沒有對植被散射相位進行糾正;而Sinc函數法雖然忽略了相位信息,但仍然取得了較好的反演結果;傳統的相位與幅度聯合法是在RVoG地相位法的基礎上用Sinc函數法彌補,雖然改進了RVoG地相位法,但也有相關度比較低的缺點;三階段反演法在相關度與均方根誤差方面都有比較好的結果;本文算法得到了較好的結果,改善了傳統相位與幅度聯合法相關度較低的情況,同樣也降低了均方根誤差。
從反演結果來看,Sinc函數法和RVoG地相位法出現較明顯的估計誤差;傳統相位與幅度聯合法雖然在部分林區獲得了較好的結果,但有的林區卻出現誤差更大的情況,原因在于在密度較大的林區RVoG地相位本就會出現高估現象,再利用Sinc函數法進行增補就會令誤差更加增大;三階段算法誤差較小且結果比較穩定;而本文算法相較于傳統的相位與幅度聯合法有了很大的改善,也取得了比三階段算法更好的結果,且該算法運算過程簡單、反演速度快;缺點在于需要提前知道森林密度這一先驗知識,才能得到較好的反演結果。
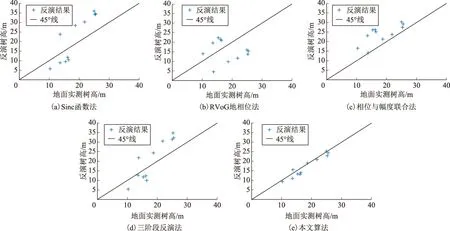
圖9 5種算法反演結果比較
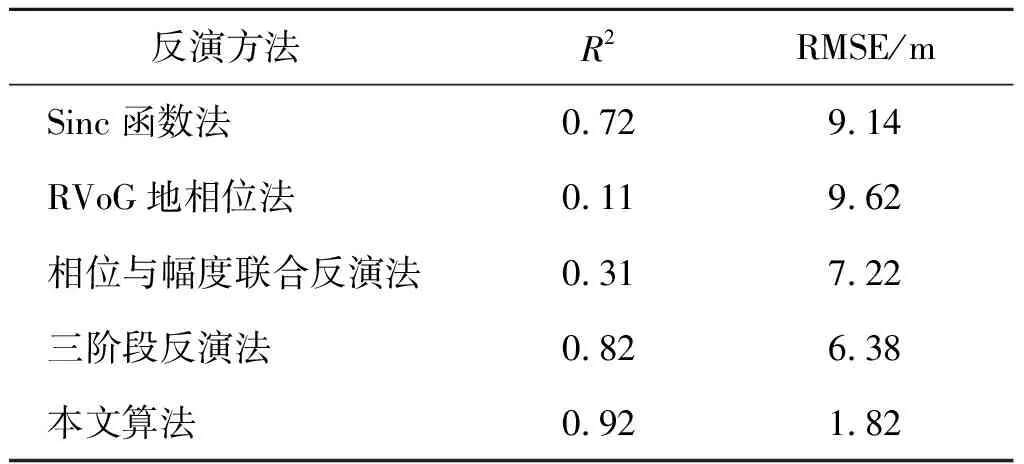
表2 反演結果比較
4 結束語
本文針對現階段反演森林樹高算法中對森林密度研究不足的問題,提出了一種基于森林密度的改進相位與幅度聯合反演算法。通過真實的極化干涉SAR數據實驗,表明本文算法反演的植被高度相比傳統算法精度更高,驗證了算法的有效性和可靠性。
