無(wú)人駕駛純電動(dòng)汽車(chē)制動(dòng)扭矩分配控制方法
2020-06-03 02:41:08王晶李瑋
汽車(chē)實(shí)用技術(shù) 2020年9期
關(guān)鍵詞:分配
王晶 李瑋


摘 要:文章提出了一種無(wú)人駕駛純電動(dòng)汽車(chē)制動(dòng)扭矩分配控制方法。該方法首先根據(jù)動(dòng)力電池、驅(qū)動(dòng)電機(jī)狀態(tài)以及整車(chē)狀態(tài)計(jì)算驅(qū)動(dòng)電機(jī)最大能量回收扭矩,并在此基礎(chǔ)上進(jìn)行需求制動(dòng)扭矩分配;接下來(lái)創(chuàng)造性的將電機(jī)系統(tǒng)引入到制動(dòng)控制系統(tǒng)中,充分考慮了液壓制動(dòng)系統(tǒng)由于溫度(如熱衰減)、部件機(jī)械特性以及環(huán)境等影響其輸出制動(dòng)力矩穩(wěn)定性與準(zhǔn)確性的因素,通過(guò)電機(jī)能量回收所產(chǎn)生的制動(dòng)扭矩對(duì)此進(jìn)行補(bǔ)償,保證最終車(chē)輛制動(dòng)過(guò)程中所產(chǎn)生的負(fù)向加速度與需求保持一致。最后通過(guò)實(shí)車(chē)實(shí)驗(yàn),驗(yàn)證了該方法的可行性與可靠性。
關(guān)鍵詞:純電動(dòng)汽車(chē);無(wú)人駕駛;制動(dòng);能量回收
中圖分類(lèi)號(hào):U469.72 ?文獻(xiàn)標(biāo)識(shí)碼:A ?文章編號(hào):1671-7988(2020)09-49-04
A Torque Distribution Control Method for Driverless Electric Vehicle*
Wang Jing1, Li Wei2
(1.Langfang Polytechnic Institute, Department of Mechanical and Electrical Engineering, Hebei Langfang 065000;2.Beijing Electric Vehicle CO.,?Ltd., Engineering Research Institute, Beijing 100176?)
Abstract:?This paper presents a torque distribution control method for driverless pure electric vehicle. This method first calculates the maximum energy recovery torque of the driving motor according to the status of the power battery, the driving motor and the vehicle, and then distributes the required braking torque; then creatively introduces the motor system into the braking control system, fully considering the transmission of the hydraulic pressing system due to the influence of temperature (such as heat attenuation), mechanical characteristics of components and environment factors of stability and accuracy of braking torque are given. The braking torque generated by motor energy recovery is compensated to ensure that the negative acceleration generated in the final vehicle braking process is consistent with the demand. Finally, the feasibility and reliability of the method are verified by the real vehicle experiment.
Keywords: Electric vehicle; Driverless; Braking; Energy recovery
CLC NO.: U469.72??Document Code: A ?Article ID:?1671-7988(2020)09-49-04
前言
當(dāng)前形勢(shì)下,發(fā)展新能源汽車(chē),尤其是具有零污染、零排放的純電動(dòng)汽車(chē),不僅對(duì)我國(guó)能源安全、環(huán)境保護(hù)具有重大意義,同時(shí)也是我國(guó)汽車(chē)領(lǐng)域?qū)崿F(xiàn)轉(zhuǎn)型升級(jí)、技術(shù)突破的重要方向。無(wú)人駕駛汽車(chē)作為智能汽車(chē)的一種同樣是汽車(chē)領(lǐng)域今后發(fā)展的趨勢(shì)[1-3],相比較于傳統(tǒng)燃油車(chē),純電動(dòng)汽車(chē)由于具有純電平臺(tái)、電機(jī)驅(qū)動(dòng)等特點(diǎn),因此公認(rèn)其是無(wú)人駕駛汽車(chē)更好的載體,基于該背景純電動(dòng)無(wú)人駕駛汽車(chē)已成為當(dāng)前國(guó)際上包括通用、大眾、豐田等汽車(chē)巨頭的研究熱點(diǎn)。
制動(dòng)控制是無(wú)人駕駛車(chē)輛實(shí)現(xiàn)縱向控制的關(guān)鍵技術(shù)之一[4,5],當(dāng)前純電動(dòng)無(wú)人駕駛汽車(chē)中的制動(dòng)系統(tǒng)大多采用線控方案,當(dāng)車(chē)輛處于無(wú)人駕駛狀態(tài)時(shí),無(wú)人駕駛控制器根據(jù)環(huán)境、障礙物、交通信號(hào)以及車(chē)輛當(dāng)前狀態(tài)等信息計(jì)算需求制動(dòng)扭矩,在此基礎(chǔ)上,由液壓制動(dòng)控制單元實(shí)現(xiàn)車(chē)輛的制動(dòng)功能。
在以上的線控制動(dòng)方案中,液壓制動(dòng)控制單元是實(shí)現(xiàn)車(chē)輛制動(dòng)功能的核心執(zhí)行機(jī)構(gòu)[6],其性能優(yōu)劣直接影響著制動(dòng)性能,考慮到液壓控制單元最終通過(guò)控制液壓卡鉗加緊剎車(chē)片來(lái)實(shí)現(xiàn)車(chē)輛制動(dòng),在無(wú)人駕駛模式下,整個(gè)控制過(guò)程存在大量的非線性環(huán)節(jié),以及不確定性,這些均會(huì)對(duì)控制的精度產(chǎn)生影響,針對(duì)這一問(wèn)題,本文提供了一種無(wú)人駕駛純電動(dòng)汽車(chē)制動(dòng)控制系統(tǒng)及制動(dòng)扭矩分配控制方法,該系統(tǒng)及方法適用于采用線控、液壓制動(dòng)控制單元制動(dòng)解決方案的無(wú)人駕駛汽車(chē)。本文首先在無(wú)人駕駛模式下由車(chē)輛控制器根據(jù)無(wú)人駕駛控制器得到的車(chē)輛期望加速度(負(fù)向)信息(該加速度信息由無(wú)人駕駛控制器根據(jù)環(huán)境、交通信號(hào)以及車(chē)輛當(dāng)前狀態(tài)獲得)計(jì)算車(chē)輛當(dāng)前需求制動(dòng)扭矩,之后根據(jù)動(dòng)力電池、驅(qū)動(dòng)電機(jī)狀態(tài)以及整車(chē)狀態(tài)計(jì)算驅(qū)動(dòng)電機(jī)最大能量回收扭矩;在此基礎(chǔ)上進(jìn)行需求制動(dòng)扭矩分配,將需求制動(dòng)扭矩分為兩部分,一部分由液壓制動(dòng)控制單元實(shí)現(xiàn),另一部分由驅(qū)動(dòng)電機(jī)的能量回收實(shí)現(xiàn)。考慮到液壓制動(dòng)控制單元真實(shí)產(chǎn)生的制動(dòng)扭矩會(huì)與實(shí)際需求之間存在誤差,以及由于環(huán)境、路面等因素造成的制動(dòng)過(guò)程產(chǎn)生的負(fù)向加速度與實(shí)際需求間的偏差等問(wèn)題,該方法通過(guò)在一定范圍內(nèi)對(duì)電機(jī)能量回收過(guò)程中產(chǎn)生的制動(dòng)扭矩進(jìn)行調(diào)節(jié)來(lái)進(jìn)行補(bǔ)償。本文創(chuàng)造性的將電機(jī)系統(tǒng)引入到制動(dòng)控制系統(tǒng)中,充分的考慮了液壓制動(dòng)系統(tǒng)由于溫度(如熱衰減)、部件機(jī)械特性以及環(huán)境等影響其輸出制動(dòng)力矩穩(wěn)定性與準(zhǔn)確性的因素,通過(guò)電機(jī)能量回收所產(chǎn)生的制動(dòng)扭矩對(duì)此進(jìn)行補(bǔ)償,保證最終車(chē)輛制動(dòng)過(guò)程中所產(chǎn)生的負(fù)向加速度與需求保持一致。
1?線控液壓制動(dòng)系統(tǒng)構(gòu)架
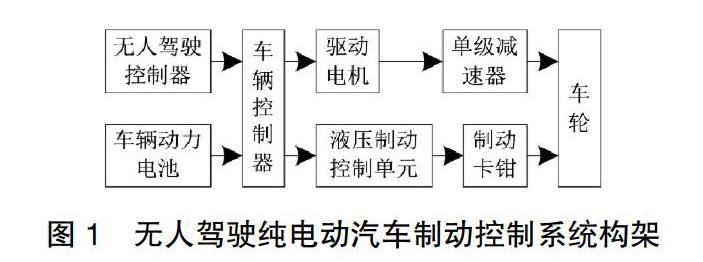
本文提到的無(wú)人駕駛純電動(dòng)汽車(chē)制動(dòng)控制系統(tǒng)構(gòu)架見(jiàn)圖1。
圖1中,無(wú)人駕駛控制器根據(jù)車(chē)載傳感器(攝像頭、激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)、GPS等)獲取車(chē)輛的位置、環(huán)境、交通信號(hào)、障礙物等信息,并根據(jù)以上信息計(jì)算得到車(chē)輛的期望縱向加速度,無(wú)人駕駛控制器將該加速度信息反饋給車(chē)輛控制器,若該加速度為負(fù),則車(chē)輛控制器執(zhí)行制動(dòng)操作。其中車(chē)輛控制器是傳統(tǒng)純電動(dòng)汽車(chē)中三大控制系統(tǒng)的總稱,其包括整車(chē)控制器、電機(jī)控制器與電池管理系統(tǒng)。車(chē)輛控制器在執(zhí)行制動(dòng)操作時(shí)首先根據(jù)接收到的車(chē)輛期望加速度(負(fù)向)計(jì)算需求制動(dòng)扭矩,之后根據(jù)動(dòng)力電池及車(chē)輛狀態(tài)(故障信息、電池允許最大充放電功率、電池SOC等)對(duì)需求制動(dòng)扭矩進(jìn)行分配,分別分配給驅(qū)動(dòng)電機(jī)與液壓制動(dòng)單元,其中驅(qū)動(dòng)電機(jī)部分的需求扭矩通過(guò)能量回收模式實(shí)現(xiàn),驅(qū)動(dòng)電機(jī)所產(chǎn)生的制動(dòng)扭矩通過(guò)單級(jí)減速器直接作用在車(chē)輪中,液壓制動(dòng)控制單元根據(jù)所分配到的制動(dòng)扭矩控制制動(dòng)卡鉗,實(shí)現(xiàn)車(chē)輛制動(dòng)。最后車(chē)輛控制器根據(jù)制動(dòng)所產(chǎn)的負(fù)向加速度與無(wú)人駕駛控制器發(fā)送的期望加速度進(jìn)行比較,判斷制動(dòng)是否達(dá)到預(yù)期,若未達(dá)到預(yù)期則對(duì)扭矩分配進(jìn)行調(diào)整,最終形成閉環(huán)對(duì)車(chē)輛制動(dòng)過(guò)程進(jìn)行控制。
液壓制動(dòng)控制單元是該控制構(gòu)架中的重要組成部分,其具體構(gòu)架如圖2所示:
圖2為圖1中所提到的液壓制動(dòng)控制單元,該系統(tǒng)在控制器接收到需求制動(dòng)扭矩后,通過(guò)控制電機(jī)、液泵等系統(tǒng)實(shí)現(xiàn)制動(dòng)液流入、流出制動(dòng)輪缸,最終達(dá)到對(duì)制動(dòng)卡鉗的控制,從而實(shí)現(xiàn)車(chē)輛的制動(dòng)功能(產(chǎn)生需求制動(dòng)扭矩)。
本文所提到的制動(dòng)系統(tǒng)制動(dòng)扭矩分配及控制方法僅將液壓制動(dòng)控制單元作為單純的執(zhí)行機(jī)構(gòu)(根據(jù)命令產(chǎn)生制動(dòng)扭矩),不涉及對(duì)液壓控制單元內(nèi)部的控制。
2 需求制動(dòng)扭矩計(jì)算
無(wú)人駕駛控制器根據(jù)車(chē)載傳感器,如攝像頭、激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)、GPS等獲取車(chē)輛的位置、環(huán)境、交通信號(hào)、障礙物等信息,并根據(jù)一定的控制邏輯向車(chē)輛控制器發(fā)送期望控制狀態(tài),最終實(shí)現(xiàn)無(wú)人駕駛功能。無(wú)人駕駛汽車(chē)的縱向控制實(shí)際上是車(chē)速控制,其中就車(chē)輛的制動(dòng)控制而言,無(wú)人駕駛控制器是通過(guò)向車(chē)輛控制器發(fā)送期望車(chē)輛加速度(負(fù)向),之后由車(chē)輛控制器響應(yīng)該命令,通過(guò)對(duì)液壓制動(dòng)控制單元以及電機(jī)能量回收的控制最終實(shí)現(xiàn)車(chē)輛的制動(dòng)功能。
車(chē)輛制動(dòng)功能的實(shí)現(xiàn),實(shí)際上是由施加在車(chē)輪中的制動(dòng)扭矩來(lái)實(shí)現(xiàn)的,因此在本文中,車(chē)輛控制器接收到無(wú)人駕駛控制器發(fā)送的期望加速度信息后,首先需要將其轉(zhuǎn)換為車(chē)輛的需求制動(dòng)扭矩信息,關(guān)于需求制動(dòng)扭矩的計(jì)算本文采用以下方法。
圖3中Va表示無(wú)人駕駛控制器發(fā)送的期望車(chē)輛加速度值,Vn表示車(chē)輛當(dāng)前速度,Tb表示通過(guò)查表得到的車(chē)輛需求制動(dòng)扭矩。實(shí)際行駛中的車(chē)輛,對(duì)其施加特定的制動(dòng)扭矩,其產(chǎn)生的負(fù)向加速度與車(chē)輛狀態(tài)及環(huán)境因素強(qiáng)相關(guān),如在高速行駛狀態(tài)下,風(fēng)阻較大,此時(shí)相同制動(dòng)扭矩條件下車(chē)輛產(chǎn)生的負(fù)向加速度較低速行駛工況更高;同樣,環(huán)境風(fēng)速、行駛路面狀況(對(duì)應(yīng)車(chē)輪的滾動(dòng)摩擦系數(shù))以及上下坡等均會(huì)對(duì)車(chē)輛最終的負(fù)向加速度產(chǎn)生影響。本文中,通過(guò)前期進(jìn)行實(shí)車(chē)實(shí)驗(yàn)(在環(huán)境風(fēng)速三級(jí)以下、干燥平直的鋪裝路面條件下開(kāi)展),通過(guò)施加不同的制動(dòng)扭矩獲得不同車(chē)速條件下所產(chǎn)生的負(fù)向加速度值,經(jīng)整理后得到期望加速度Va、車(chē)輛當(dāng)前速度Vn與制動(dòng)扭矩Tb的對(duì)應(yīng)關(guān)系,將其存儲(chǔ)在表格中,在實(shí)際應(yīng)用中,通過(guò)Va與Vn可以直接查詢得到需求制動(dòng)扭矩Tb。
圖3所示的車(chē)輛需求制動(dòng)扭矩計(jì)算方法未考慮環(huán)境,如風(fēng)速、路面條件等因素對(duì)Tb所造成的的影響,但在本文中該部分的影響可通過(guò)對(duì)電機(jī)能量回收強(qiáng)度的調(diào)節(jié)進(jìn)行補(bǔ)償。
3?制動(dòng)扭矩分配及控制
該部分包含三方面內(nèi)容,分別為最大允許能量回收扭矩計(jì)算、制動(dòng)扭矩分配以及制動(dòng)扭矩控制,下面分別進(jìn)行介紹。
3.1?最大允許能量回收扭矩計(jì)算
為保證車(chē)輛制動(dòng)過(guò)程中最大限度的提高車(chē)輛能量使用效率,首先進(jìn)行最大允許能量回收扭矩的計(jì)算,計(jì)算方法見(jiàn)式(1):
其中,Tmax表示電機(jī)極限能量回收扭矩;PMotor表示電機(jī)最大允許發(fā)電功率(Kw);PBatt表示電池最大允許充電功率(Kw);η表示電機(jī)發(fā)電效率;ω表示電機(jī)轉(zhuǎn)速。根據(jù)式(1)可得到電機(jī)極限能量回收扭矩。
為保護(hù)電機(jī)與動(dòng)力電池,不應(yīng)讓其在極限值工作,為此引入扭矩余量。
式(2)中?T表示扭矩余量,Tmotor表示電機(jī)最大允許能量回收扭矩。由該式可以看出,?T的引入保證了電機(jī)與動(dòng)力電池不工作在極限狀態(tài),因此對(duì)電機(jī)與電池起到了保護(hù)作用。
3.2?制動(dòng)扭矩分配
完成最大允許能量回收扭矩計(jì)算后,接下來(lái)對(duì)扭矩進(jìn)行分配,定義TK為液壓執(zhí)行機(jī)構(gòu)分配得到的制動(dòng)扭矩,TM為電機(jī)分配得到的能量回收(發(fā)電)扭矩,其計(jì)算方法如下:
其中KM表示電機(jī)能量回收系數(shù),該值小于1,其目的在于為后續(xù)的能量回收扭矩的微調(diào)提供調(diào)節(jié)余量。由圖3所示的方法得到車(chē)輛需求制動(dòng)扭矩Tb,根據(jù)式(3)、(4),若KM?Tmotor≥Tb條件得到滿足,則意味著由電機(jī)能量回收產(chǎn)生的扭矩能夠滿足制動(dòng)需求,此時(shí)TM為T(mén)b,同時(shí)TK為0;若以上條件未得到滿足則電機(jī)分配得到的制動(dòng)扭矩為KM??Tmotor,液壓制動(dòng)控制單元分配得到的制動(dòng)扭矩為T(mén)b-KM??Tmotor。
該分配方法考慮了需求制動(dòng)扭矩較小的情況,在這種情況下不對(duì)液壓制動(dòng)控制單元分配制動(dòng)扭矩,完全通過(guò)電機(jī)制動(dòng)能量回收提供制動(dòng)需求,減少了液壓制動(dòng)系統(tǒng)的總工作時(shí)間,這對(duì)于避免制動(dòng)系統(tǒng)由于長(zhǎng)時(shí)間工作產(chǎn)生的熱衰減以及延長(zhǎng)壽命均具有重要意義;與此同時(shí),該方法由于能夠極大限度的回收制動(dòng)中產(chǎn)生的能量,因此對(duì)于延長(zhǎng)車(chē)輛的有效續(xù)駛里程具有積極影響。
3.3?制動(dòng)扭矩控制
式(3)與式(4)完成了制動(dòng)扭矩的分配,考慮到液壓控制單元在執(zhí)行制動(dòng)扭矩命令時(shí)的誤差,或一些特殊工況下(如下坡、上坡、順風(fēng)、逆風(fēng)等)在施加制動(dòng)扭矩后車(chē)輛產(chǎn)生的加速度(負(fù)向)低于或高于預(yù)期,針對(duì)這一情況,設(shè)計(jì)調(diào)整策略,通過(guò)調(diào)節(jié)電機(jī)的能量回收扭矩對(duì)其進(jìn)行補(bǔ)償,從而使車(chē)輛達(dá)到預(yù)期制動(dòng)效果,具體方法如下。
圖4中,Va為無(wú)人駕駛控制器發(fā)出的車(chē)輛需求加速度信息,經(jīng)制動(dòng)扭矩計(jì)算環(huán)節(jié)后得到需求制動(dòng)扭矩Tb,在此基礎(chǔ)上進(jìn)行扭矩分配,其中分配到液壓制動(dòng)控制單元與驅(qū)動(dòng)電機(jī)的制動(dòng)扭矩分別為T(mén)K與TM;之后液壓制動(dòng)控制單元與驅(qū)動(dòng)電機(jī)按照扭矩命令分別對(duì)車(chē)輛產(chǎn)生制動(dòng)扭矩;在制動(dòng)扭矩的作用下車(chē)輛產(chǎn)生減加速度Vra,需求加速度Va與車(chē)輛實(shí)際產(chǎn)生的加速度Vra相減,得到加速度偏差ae,利用該偏差通過(guò)扭矩補(bǔ)償環(huán)節(jié)得到補(bǔ)償扭矩Te,利用Te對(duì)TM進(jìn)行補(bǔ)償,最終保證車(chē)輛能夠產(chǎn)生預(yù)期的減速度。
根據(jù)圖4可以看出,該控制方法中的核心為扭矩補(bǔ)償,關(guān)于補(bǔ)償扭矩Te的計(jì)算,采用以下解決方法。
其中Vn表示車(chē)輛當(dāng)前速度,本文分別在不同坡度的工況下進(jìn)行上坡與下坡的實(shí)車(chē)標(biāo)定,從而獲得不同車(chē)速上坡、下坡行駛狀態(tài)下,偏差加速度ae與補(bǔ)償扭矩Te的對(duì)應(yīng)關(guān)系,并將其以表格形式進(jìn)行存儲(chǔ),在實(shí)際應(yīng)用過(guò)程中通過(guò)偏差加速度ae與車(chē)輛當(dāng)前速度Vn直接查詢得到補(bǔ)償扭矩Te。該補(bǔ)償方式能夠有效的對(duì)車(chē)輛上坡、下坡、順風(fēng)行駛、逆風(fēng)行駛、不同路面條件(對(duì)應(yīng)不同的車(chē)輪滾動(dòng)阻力系數(shù))以及液壓制動(dòng)控制單元制動(dòng)扭矩誤差所引起的加速度偏差進(jìn)行補(bǔ)償。
4?實(shí)車(chē)試驗(yàn)
通過(guò)實(shí)車(chē)試驗(yàn)對(duì)本文所提出的控制方法進(jìn)行驗(yàn)證。
圖5為需求制動(dòng)扭矩及分配示意圖,其中最上邊的實(shí)線表示當(dāng)前車(chē)輛所需的制動(dòng)扭矩,中間的虛線為驅(qū)動(dòng)電機(jī)所分配的制動(dòng)扭矩,最下邊的曲線為液壓制動(dòng)單元所分配的制動(dòng)扭矩。圖6為制動(dòng)過(guò)程中期望車(chē)輛所產(chǎn)生的加速度(負(fù)向),圖7為實(shí)車(chē)實(shí)驗(yàn)過(guò)程中車(chē)輛實(shí)際所產(chǎn)生的加速度(負(fù)向),圖8為車(chē)輛實(shí)際加速度與期望加速度間的偏差。
可以看出,采用本文所提出的方法能夠?qū)④?chē)輛制動(dòng)過(guò)程中加速度(負(fù)向)的偏差控制在±0.05m?/s,能夠有效的保證制動(dòng)過(guò)程中車(chē)輛的平順性。
5 結(jié)論
本文提供了一種無(wú)人駕駛純電動(dòng)汽車(chē)制動(dòng)控制系統(tǒng)及制動(dòng)扭矩分配控制方法,該系統(tǒng)及方法適用于采用線控、液壓制動(dòng)控制單元制動(dòng)解決方案的無(wú)人駕駛汽車(chē)。本文首先在無(wú)人駕駛模式下由車(chē)輛控制器根據(jù)無(wú)人駕駛控制器得到的車(chē)輛期望加速度(負(fù)向)信息(該加速度信息由無(wú)人駕駛控制器根據(jù)環(huán)境、交通信號(hào)以及車(chē)輛當(dāng)前狀態(tài)獲得)計(jì)算車(chē)輛當(dāng)前需求制動(dòng)扭矩,之后根據(jù)動(dòng)力電池、驅(qū)動(dòng)電機(jī)狀態(tài)以及整車(chē)狀態(tài)計(jì)算驅(qū)動(dòng)電機(jī)最大能量回收扭矩;在此基礎(chǔ)上進(jìn)行需求制動(dòng)扭矩分配。考慮到液壓制動(dòng)控制單元真實(shí)產(chǎn)生的制動(dòng)扭矩會(huì)與實(shí)際需求之間存在誤差,以及由于環(huán)境、路面等因素造成的制動(dòng)過(guò)程產(chǎn)生的負(fù)向加速度與實(shí)際需求間的偏差等問(wèn)題,該方法通過(guò)在一定范圍內(nèi)對(duì)電機(jī)能量回收過(guò)程中產(chǎn)生的制動(dòng)扭矩進(jìn)行調(diào)節(jié)來(lái)進(jìn)行補(bǔ)償,保證最終車(chē)輛制動(dòng)過(guò)程中所產(chǎn)生的負(fù)向加速度與需求保持一致。本文給出的控制方法不改變液壓制動(dòng)控制單元的制動(dòng)扭矩分配,盡量通過(guò)調(diào)整電機(jī)能量回收扭矩來(lái)補(bǔ)償車(chē)輛的加速度誤差,降低了控制難度,因此具有較大的推廣意義。另外通過(guò)實(shí)車(chē)實(shí)驗(yàn),驗(yàn)證了該方法的可行性及有效性。
參考文獻(xiàn)
[1] 潘福全,亓榮杰,張璇,張麗霞.無(wú)人駕駛汽車(chē)研究綜述與發(fā)展展望?[J].科技創(chuàng)新與應(yīng)用,2017,02:27-28.
[2] 端木慶玲,阮界望,馬鈞.無(wú)人駕駛汽車(chē)的先進(jìn)技術(shù)與發(fā)展[J].農(nóng)業(yè)裝備與車(chē)輛工程,2014,03:30-33.
[3] 潘建亮.無(wú)人駕駛汽車(chē)社會(huì)效益與影響分析[J].汽車(chē)工業(yè)研究, 2014,05:22-24.
[4] 余卓平,韓偉,熊璐.集成式電子液壓制動(dòng)系統(tǒng)液壓力變結(jié)構(gòu)控制[J].汽車(chē)工程,2017,39(1):52-60.
[5] XIONG L,YUAN B,GUANG X,et al.Analysis and design ofdual-?motor electro-hydraulic brake system[C].SAE Paper 2014-01-2532.
[6] 楊保香,韓斌慧.汽車(chē)電控液壓制動(dòng)系統(tǒng)控制策略模型及仿真研究[J].自動(dòng)化與儀器儀表,2017,3:87-90.
猜你喜歡
天水行政學(xué)院學(xué)報(bào)(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
漢語(yǔ)世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會(huì)主義學(xué)院學(xué)報(bào)(2017年1期)2017-04-16 05:34:07
中國(guó)衛(wèi)生(2014年12期)2014-11-12 13:12:40

- 汽車(chē)實(shí)用技術(shù)的其它文章
- 中國(guó)新能源汽車(chē)發(fā)展歷程回顧及未來(lái)展望
- 陜西省汽車(chē)產(chǎn)業(yè)園現(xiàn)狀及發(fā)展對(duì)策
- 我國(guó)道路運(yùn)輸車(chē)輛維護(hù)周期優(yōu)化效果評(píng)價(jià)研究綜述
- 基于大數(shù)據(jù)背景下的汽車(chē)4S店?duì)I銷(xiāo)模式優(yōu)化
- 汽車(chē)產(chǎn)品檢測(cè)認(rèn)證行業(yè)國(guó)有企業(yè)發(fā)展戰(zhàn)略研究
- 基于IPD理論的整車(chē)研發(fā)試驗(yàn)管理系統(tǒng)建設(shè)規(guī)劃探討