多通道真空顯控系統設計
2020-06-03 17:23:29蔡龍
科技視界 2020年13期
蔡龍

摘 要本文介紹了一種基于STM32微控制器的多通道真空度顯示與控制系統。該系統由STM32微控制器、信號調理電路、RS232通訊接口、LCD模塊、真空規與上位機組成。基于此系統搭建四極質譜儀真空腔體測試平臺,可控制8路真空進樣閥的開關,同時顯示、上傳8個被測腔體的真空度數據,據此實現四極質譜儀真空部件的篩查與性能對比。與傳統方案相比,所研制的真空顯控系統具有較高的集成度、較低的成本和緊湊的體積,并提高了測試的自動化程度與可靠性。
關鍵詞真空測量;Cortex-M3;真空;真空規
0 前言
真空是四極質譜儀的“生命”,是質譜儀極為重要的組成部分[1]。四極質譜儀真空系統的組成如圖1所示。進樣閥實現不同梯度真空的連通與隔斷;進樣膜是分隔不同真空的部件;真空腔體承載離子源、質量分析器、檢測器等核心部件并連接各個真空部件;真空泵用于獲得質譜儀的工作壓力,一般由前級泵與后級泵組成[2];真空規為真空度測量部件。
真空系統在設計時需要考慮多種因素,比如不同材質的真空腔體的放氣程度、保壓能力;不同廠家、規格真空泵的抽氣效果等等。設計方案之間的對比測試必不可少,而真空度數據的記錄與歸納整理顯得尤為重要。在傳統方案中,串行測試實效性差,并行測試則需要多路真空規,而市面上絕大多數真空計都只能對應一個真空規,測試人員難以同時對多路真空度數據進行連續準確地記錄,此外,每一路進樣閥都需要一個驅動信號去控制,進一步增加了系統的復雜度。為此,本文介紹了一種多通道真空顯控系統(以下簡稱顯控系統),用以改善傳統方案效率低、成本高、布線復雜的等不足。
1 系統硬件設計
所設計的電路硬件系統包括以STM32F103RCT6微控制器為核心最小系統,RS232通訊模塊、LCD顯示模塊、真空度采集模塊和進樣閥控制模塊,如圖2所示。其中真空規將所測的壓力信號轉換為電信號,根據使用需求,真空規選用安捷倫FRG700型全量程規。系統中8路真空規輸出的信號經模擬多路復用電路選通后,進入信號調理電路和AD轉換電路,STM32微控制器通過串行接口獲取ADC數據,進行分析處理,再通過RS232通訊接口,向上位機傳輸真空度等相關數據。同時,微控制器接收上位機發送的控制指令,控制8路進樣閥的開閉。此外,微控制器使用16位并行接口驅動4.3寸的TFT_LCD屏,用以顯示真空度、閥狀態等相關信息。
1.1 真空度采集模塊
真空度采集模塊是整個硬件設計的核心,其性能直接影響顯控系統測量真空度的可靠性與準確性。真空規FRG700輸出的電壓信號與所測壓力呈對數關系,該信號的電壓范圍為0~10.5V,模擬電子開關受STM32控制實現模擬多路復用功能,將8路真空規的輸出信號分時導通,經差分電路進行降壓與有源低通濾波器消噪后,送入ADC芯片進行模擬量的采集讀取。多路選通與信號調理電路的原理圖如圖3所示。
AD轉換的作用是將濾波電路輸出的模擬信號V_Vac轉換為數字量信號,芯片選用TI公司的ADS1246,它是24位單通道、差分輸入的AD轉換器,具有高精度、24位無失碼、極低內部電壓基礎漂移、增益可編程等特性,是微控制系統進行高精密數據采集的理想產品。微控制器通過SPI串行通訊獲取AD轉換后的數據,相關引腳包括SCLK、DIN、DOUT、CS和DRDY等,電路原理圖如圖4所示。
1.2 進樣閥控制電路
進樣閥是真空系統中重要的控制部件,進樣閥的開啟與關斷,可實現進樣管路與真空管路之間的連通與隔斷,進而將樣品引入到真空腔內部的核心分析單元之中。進樣閥動作后,在真空泵抽氣作用下,真空腔內真空度恢復到質譜儀正常工作壓力所需時間,是測試平臺的主要測試項目之一。本系統中的進樣閥額定開啟電壓為24V,由雙路繼電器中的一路控制其開閉,繼電器另一路連接雙色LED,用于指示進樣閥的狀態。由于微控制器輸出電流有限,因此加入了達林頓陣列芯片ULN2003以增強驅動能力[3]。進樣閥控制電路的原理圖如圖5所示。
2 系統軟件設計
本設計使用STM32固件庫進行開發,采用模塊化的軟件設計理念,并引入μC/OS-II嵌入式實時操作系統管理各軟件模塊。系統軟件設計工作主要包括以下幾個方面:(1)將μC/OS-II操作系統移植到微控制器中,經過裁剪配置,建立嵌入式開發平臺;(2)將工程劃分為足夠小的模塊,并將模塊功能編寫為函數,實現用戶任務的創建;(3)設計基于多任務切換機制的應用軟件。
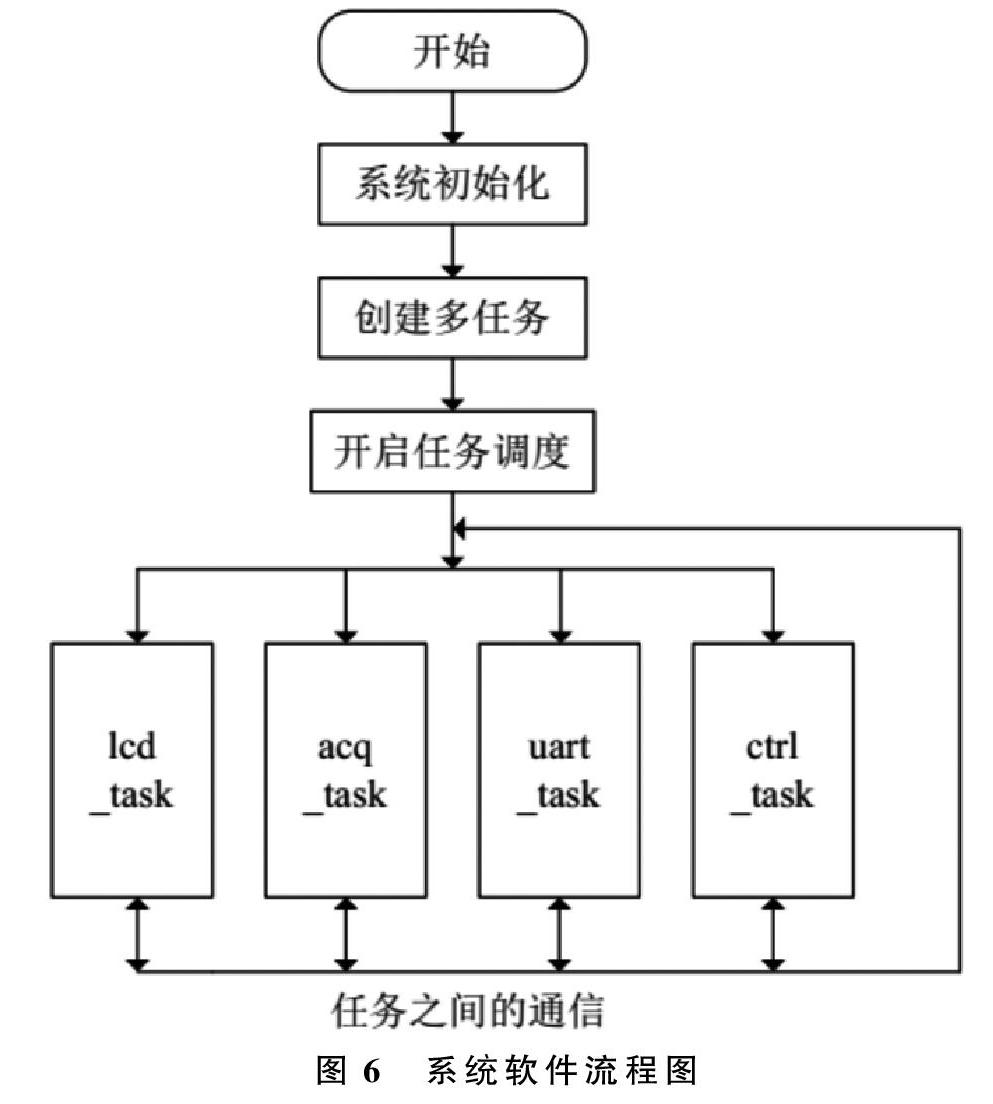
系統軟件運行流程如下:首先完成μC/OS-II以及硬件外設的初始化;然后建立了開始任務,并在開始任務中創建了4個子任務;最后調用啟動函數來開啟操作系統,系統軟件流程圖如圖6所示。為實現系統的同步和管理,系統中的多個任務在運行時,通過信號量和消息郵箱的方式進行通信[4]。
系統所建立的4個子任務中,優先級最高的為采集任務acq_task,負責控制模擬電子開關的分時選通、24位采樣數據的獲取以及電壓與壓力之間的轉換計算;其次是通訊任務uart_task,負責對發送給上位機的數據進行組包,以及對串口接收的數據進行協議解析與響應;然后是閥控任務ctrl_task,負責控制各路進樣閥的開閉;最后是顯示任務lcd_task,負責更新液晶屏的顯示信息。在本設計中,微控制器與上位機間通過“查詢/回應”的方式實現數據通訊,程序通過使用OSIntEnter()和OSIntExit()這兩個指令,使得串口發送/接收完成中斷函數運行時不會被打斷[5]。
3 系統測試
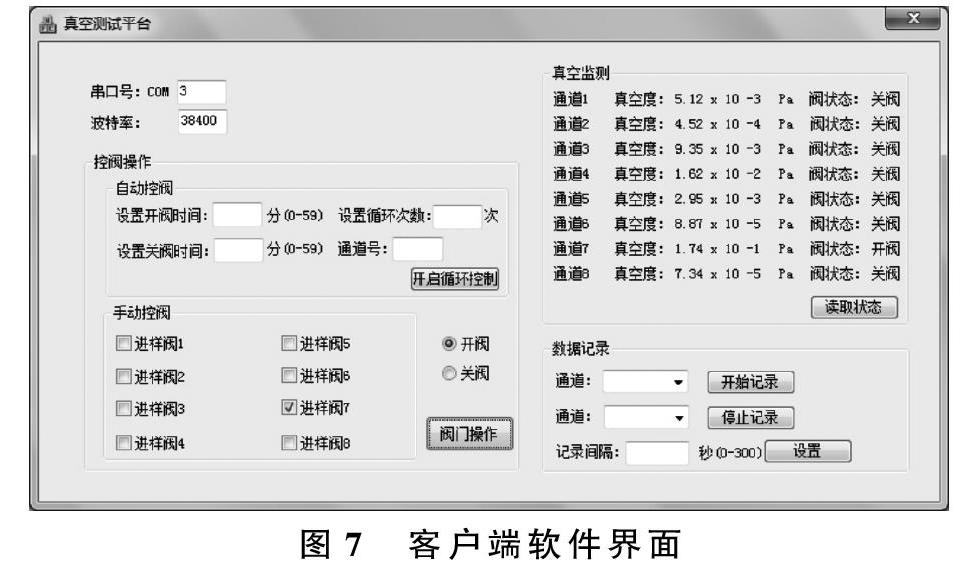
將各通道的真空規與進樣閥的控制線纜接入到所設計的硬件板卡上,通道號與板卡連接器的編號需一一對應。供電電源方面,僅需一路24V直流電源即可使系統正常工作。上位機的客戶端軟件使用VC++ 6.0開發平臺完成,其界面如圖7所示。
在客戶端軟件相應的功能區域開展相應的操作。在真空監測功能區域,軟件實時更新顯控系統上傳的真空度與進樣閥的狀態信息,當對通道7的進樣閥進行了開閥操作后,可看出通道7的真空度隨之降低,閥狀態也更新為“開閥”,并且真空監測的信息與顯控系統LCD顯示的內容相一致。由此可見,上、下位機之間指令解析正確,所設計的顯控系統功能完備。
4 結論
多通道真空顯控系統以STM32微控制器為核心,采用模塊化的硬件電路設計。在軟件設計上引入了μC/OS-II嵌入式實時操作系統,增強了系統的實時性與穩定性,并應用Micro soft Visual C++ 6.0設計了客戶端軟件,使得系統可以自動運行。測試結果表明,顯控系統可同時完成8路進樣閥的控制與真空度的記錄,降低了使用成本,簡化了系統。所設計的顯控系統也可應用于其他閥控類和真空測量的場合,具有較好的拓展性。
參考文獻
[1]姜佩賀,周志權,陳煥文,趙占鋒.低真空環境下四極桿質量分析器靈敏度仿真研究[J].質譜學報,2018,39(01):20-27.
[2]趙加鵬,龍希偉,宋春麗,李芳,陳寧.四極質譜儀真空系統設計[J].真空,2017,54(04):13-17.
[3]麻碩,邱忠義,陳卓哲.小型真空室真空測量與控制系統的設計與實現[J].自動化與儀表,2017,32(04):59-62.
[4]謝苗苗,李華龍,李能菲.基于STM32的諧波參數實時獲取便攜裝置設計[J].儀表技術,2013(02):32-34.
[5]何康華,雷陽陽.基于uCOS-III的教育機器人系統設計[J].電子測量技術,2016,39(10):114-118.
