基于移動平臺的海域無人機監視監測系統研究
2020-06-01 07:18:14朱瑞,施麟,陳寧
江蘇科技信息 2020年10期
朱 瑞,施 麟,陳 寧
(1.江蘇省海域使用動態監視監測中心,江蘇南京210017;2.江蘇省財政廳財政信息管理中心,江蘇南京210024;3.江蘇省水利網絡數據中心,江蘇南京210029)
0 引言
江蘇省通過接入國家海洋信息通信網[1],實現了國家-省-市-縣四級網絡全覆蓋的海域動態監視監測體系[2]。2017年,江蘇省在全省沿海布設16座4G專網無線通信基站,將海洋信息通信網無線信號有效覆蓋沿岸及近岸海域,實現有線專網與無線專網的無縫連接,實現近岸20公里海域有效覆蓋。江蘇省已利用衛星遙感、航空遙感、遠程視頻監控、現場監測等技術,對江蘇省近岸海域開展了立體、實時監測,積累了大量遙感影像、海域海島管理和監視監測數據。目前,江蘇省海洋綜合管控平臺[3]是全省海域動態監視監測體系的核心業務平臺,該平臺依托海洋信息通信網江蘇省節點,以“數據集中、資源整合、應用協同”為主線,以“夯實基礎、突出管理、提升服務”為重點,將業務數據和基礎數據融合,為海洋綜合管理提供了有效的支撐。江蘇省海洋綜合管控平臺是基于移動平臺的海域無人機監視監測系統的基礎支撐平臺,部署于指揮中心。
1 研究目標
無人機遙感監測系統因具有機動快速的響應能力、低使用成本、高分辨率圖像和高精度定位數據獲取能力等特點,適用于低空遙感數據的快速獲取[4]。無人機航測技術是空間數據獲取的重要手段,憑借無人機機動靈活、高效快速和成本低廉的特點,可廣泛地應用于海洋測繪、海域監管和海島巡查等領域[5]。
1.1 無人機系統研究
裝備一套長航時無人機遙感系統,滿足稀少控制大比例尺測圖精度要求的新型海飛行控制系統。包括無人機起降、飛行控制、監視監測數據采集、接收等相關的軟硬件設備。開發應用于無人機航攝作業的航線規劃、航攝質量快速檢查、影像快速預處理軟件和無人機遙感數據后處理軟件,通過航攝作業測試,形成一套完整的固定翼輕型無人機遙感系統,滿足高分辨率遙感影像獲取與處理的需求。
1.2 無人機監控與管理系統研究
針對多作業模式、海量數據管理需求,通過研究應用無人機監控與管理系統,實現了從無人機任務規劃、實時監控、協同作業到指揮調度、設備管理、數據管理、分析評估的全流程系統化管理。
1.3 無人機三維立體監管系統研究
將無人機、移動平臺、地面采集終端等硬件設備一體化集成,具備無人機任務規劃、無人機遙感影像與視頻獲取、地面視頻采集、遙感影像快速處理、數據遠程傳輸、宗海制圖等功能為一體,可實現從地面到高空的全方位三維立體動態監管,實現從監視監測區域影像的快速獲取、處理到海域使用信息的提取、成圖的全流程作業。
1.4 移動平臺研究
針對海域監視監測中作業地點多變和任務多樣的需求,使用衛星通信、4G-VPDN通信、4G專網無線基站通信鏈路,實現無人機通用測控、數據采集、指揮調度、視頻會商、作業保障等功能。
2 系統設計
2.1 無人機子系統
無人機子系統集成了無人機飛行平臺、量測型數碼相機、集成了雙頻GPS的飛行控制系統、通信系統等設備,具有高精度定位解算、相機定點曝光、自動旋修偏改正功能,獲取高分辨率航空影像,滿足遙感影像獲取需要。為保障作業安全,提高影像數據質量,在執行任務的飛行準備階段設計了作業檢查記錄、飛行日志等過程文件,檢查內容主要包括無人機機體、通信鏈路、載荷、地面站、電池等硬件設備狀態,功能方面主要檢查GPS信號、飛機姿態、云臺控制、地面站信息參數、圖傳鏈路通信性能等內容[6]。無人機系統中的無人機平臺、數據鏈路、任務載荷、飛控地面站、載荷地面站等設備調試完成后,進行系統集成,完成地面測試后,進行了飛行聯試;飛行聯試后與無人機通用測控地面站進行飛行聯試,通過車載集成的數據鏈路可在車內進行無人機控制,同時接收無人機視頻遙測數據進行實時顯示。海域無人機監視監測流程如圖1所示,圖例中最終成果為南通啟東市呂四漁港經濟區航攝正射影像[7]。
2.2 無人機監控與管理子系統
無人機監控與管理子系統由現場測控與指揮分系統、業務監控與管理分系統組成,兩個分系統通過特定的數據接口進行交互,現場測控與指揮分系統負責飛行任務的具體實施和飛行數據的實時回傳。業務監控與管理分系統負責任務和數據的管理以及任務的實時監控。無人機監控與管理子系統具備如下功能。
(1)全流程業務管理功能:任務創建,任務審核,任務規劃、任務下發、任務總結、數據上傳、任務評估、現場測控、現場綜合監控、數據實時回傳、全局任務監視、數據管理等功能。
(2)實時監測無人機任務信息、無人機實時飛行狀態、視頻、航跡信息與載荷信息的功能;系統可通過海洋信息通信網實現多任務實時測控信息回傳;支持海洋信息通信網各用戶獲取無人機業務服務和數據支持。
(3)無人機飛行作業現場通過衛星通信、4G專網等通信鏈路將實時遙測信息、實時視頻數據傳送至無人機監控與管理子系統。
2.2.1 現場測控與指揮分系統
現場指揮與測控分系統主要分為協議轉換模塊、飛行監控模塊、載荷與鏈路監控、無人機狀態檢查模塊、視頻實時拼接模塊和數據管理模塊。現場指揮與測控分系統部署于移動平臺,主要實現對海域無人機現場作業任務的全程規范化管理。包括現場指揮、設備狀態檢查、通用測控、綜合實時監控等。該分系統通過海洋信息通信網與海域無人機業務監控與管理分系統數據通信,實現指揮中心對現場任務狀態的實時把握,實現對海域無人機作業任務的一體化監管。
2.2.2 業務監控與管理分系統
業務監控與管理分系統部署于指揮中心,主要包括任務管理模塊、數據管理模塊、全局任務監控模塊和系統管理模塊。業務監控與管理系統是面向海域無人機業務的綜合服務平臺。用于海域無人機實時任務監控、作業任務管理、人員及設備管理、監測數據與基礎信息管理等。該分系實現海域無人機監視監測的全流程規范化管理,與現場指揮與測控軟件進行實時數據通信可以及時掌握各無人機系統的作業狀態,滿足業務監控的精細化管理要求,實現海域無人機作業、業務數據與基礎信息的統一管理。
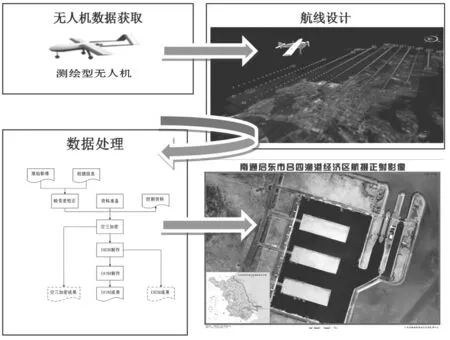
圖1 海域無人機監視監測流程
2.3 無人機三維立體監子系統
三維立體監管子系統集成了江蘇省全海岸帶高精度遙感影像數據,實現了地形地貌、海域使用現狀和海上設施的仿真再現,實現了無人機遙感監測數據的快速處理,快速顯示、快速測量與分析等[8],同時集成了江蘇省海域規劃、海域權屬、海島數據,實現專題信息的管理和三維立體展示,支撐了海域使用狀況的三維可視化管理。該平臺具有基于三維的自動化航線設計功能,能夠快速構建航飛線路,實現無人機飛行作業的實時立體三維監管,以及監管對象的實時監視監測。無人機三維立體監管子系統具備無人機遙感影像與視頻獲取、地面視頻采集、遙感影像快速處理、數據遠程傳輸、宗海制圖等功能為一體,從監視監測區域影像的快速獲取、處理到海域使用信息的提取、成圖的全流程作業。
2.4 移動平臺
移動平臺包括1輛省級和15輛縣級車體平臺[9]、車體改裝、數據處理與顯示系統、通信傳輸系統、視頻會商系統、車載定位系統及綜合保障系統。省級移動平臺由綜合監控、指揮調度、數據管理、設備管理、系統管理等功能模塊組成。綜合監控模塊包括車輛系統、無人機系統、遠程監控系統、視頻會商系統和基站系統的監控。
2.4.1 車載平臺
移動平臺配備機柜、取力發電機、電源接口箱、信號接口箱、不間斷電源等設備,對車輛進行車體及車內的改裝及設備安裝。移動平臺作為系統軟硬件設備的承載平臺,為海域監測人員提供工作空間,為應急監測任務的執行進行綜合保障。車輛改裝主要針對車頂、車底加固處理,安裝車頂云臺、天線等設備。
省級移動平臺配備無人機/載荷控制搖桿以及飛行前狀態檢查軟件、通用協議轉換軟件、飛行監控軟件,實現對無人機的飛行控制、監測數據的實時處理,近場監測視頻實時回傳等功能。飛行監控軟件可以通過三維可視化方式形象化的顯示無人機實時飛行姿態和規劃航跡,通過不同的控件形象化的展示飛機飛行狀態參數信息。通用協議轉換軟件可以實現遙測服務和視頻服務的開啟與關閉,并能監測遙測數據和視頻數據的實時流量。飛行前狀態檢查軟件用于飛機起飛前對飛機的狀態進行檢查確認,并具備無人機設備狀態檢查的訂制功能,可根據需求創建基于特定機型的設備狀態檢查模板。
2.4.2 數據采集
數據采集系統配備車頂攝像頭和風速風向儀,該分系統可進行海域周邊現場視頻監測、視頻存儲、視頻回放等功能,同時可以對現場風速風向進行測量。
2.4.3 數據處理與顯示
數據處理與顯示系統包括工控機、顯示器、KVM、混合視頻矩陣等硬件設備,同時安裝視頻拼接軟件、數據管理軟件。
2.4.4 通信傳輸
通信傳輸系統由衛星通信設備、VPDN路由器、交換機、無線基站接入終端、視頻編解碼器組成。搭建移動平臺與海洋通信網相關節點的實時通信鏈路,實現實時視頻會議、信息交互、遠程應急調度指揮等功能。
2.4.5 視頻會商
視頻會商系統包括視頻會議設備、單兵視頻會議設備,可以接入海洋信息通信網視頻會議系統,實現與海洋信息通信網相關節點的視頻會議功能;可以將單兵采集視頻實時發送到移動平臺,拓展應急監測范圍,形成省級、縣級移動平臺、單兵多點的應急監測能力。
2.4.6 車載定位
車載定位系統由北斗導航定位終端組成,能夠實現應急車的導航定位,并能夠通過短報文的形式將位置信息實時上傳至指揮中心,實現對移動平臺的實時監控定位功能。
2.4.7 綜合保障分系統
綜合保障系統由智能配電及中控、智能手持終端、對講機、車輛設備綜合監控等設備組成。可實現設備供電、設備運行的智能控制,并對車輛供電和設備運行狀態進行實時監測。
3 系統實現
基于移動平臺的海域無人機監視監測系統[10]集成充分考慮單機設備以及子系統集成,包括硬件設備、網絡的傳輸和軟件集成。硬件設備集成主要是對1輛省級和15輛縣級車體平臺車輛改裝、相關設置安裝調試。網絡的傳輸集成主要有兩種方式:一種是移動平臺利用簡單網絡管理協議,通過網絡采集硬盤錄像機、4G-VPDN路由器、視頻會議設備的狀態信息,利用232、485協議通過串口采集車載云臺攝像頭、GPS設備、風速風向儀設備的狀態信息,并將這些狀態信息封裝打包后利用4G-VPDN專網和4G基站專網將其發送到指揮中心。另一種是通過沿海已建立的16座4G專網無線基站無線通信基站,實現移動平臺設備數據傳輸、移動數據采集,將采集的監測數據直接上傳到海洋信息通信網。軟件集成主要實現移動平臺一體化實現無人機測控、移動平臺綜合指揮調度和海域機無人機數據綜合管理。網路拓撲如圖2所示。
4 結語
在海洋領域探索無人機應用和拓展無人機遙感監視監測技術,開展基于移動平臺的海域無人機監視監測系統研究,實現與其他監視監測技術的結合,對豐富和完善海域監視監測技術體系,增強海域監管水平,提升江蘇海洋綜合管控能力具有重要意義。
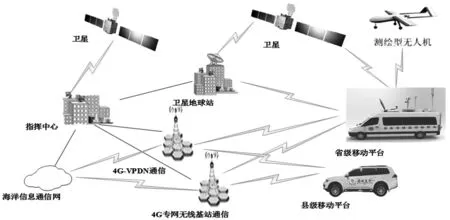
圖2 網絡拓撲
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年12期)2016-04-16 02:52:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57